

在重複和挑戰性天氣條件下的資料集和駕駛感知

arXiv論文“Ithaca365: Dataset and Driving Perception under Repeated and Challenging Weather Conditions“,22年8月1日上傳,Cornell和Ohio State兩個大學的工作。
近年來,由於採用大規模資料集,自動駕駛汽車的感知能力有所提高,這些資料集通常在特定位置和良好的天氣條件下收集。然而,為了達到高安全要求,這些感知系統必須在各種天氣條件下穩健運行,包括雪和雨的情況。
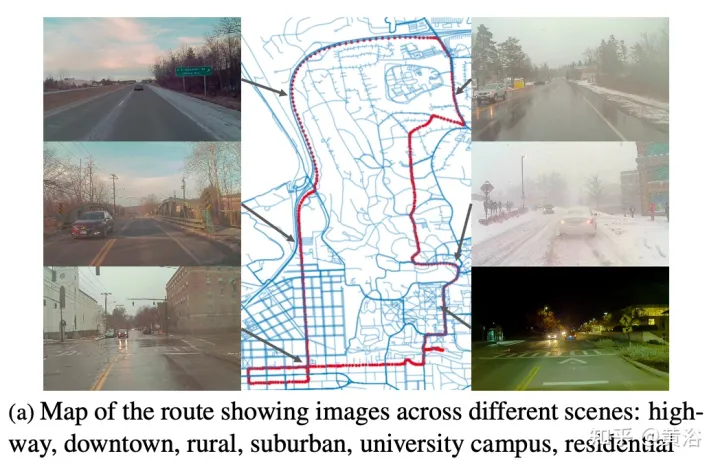
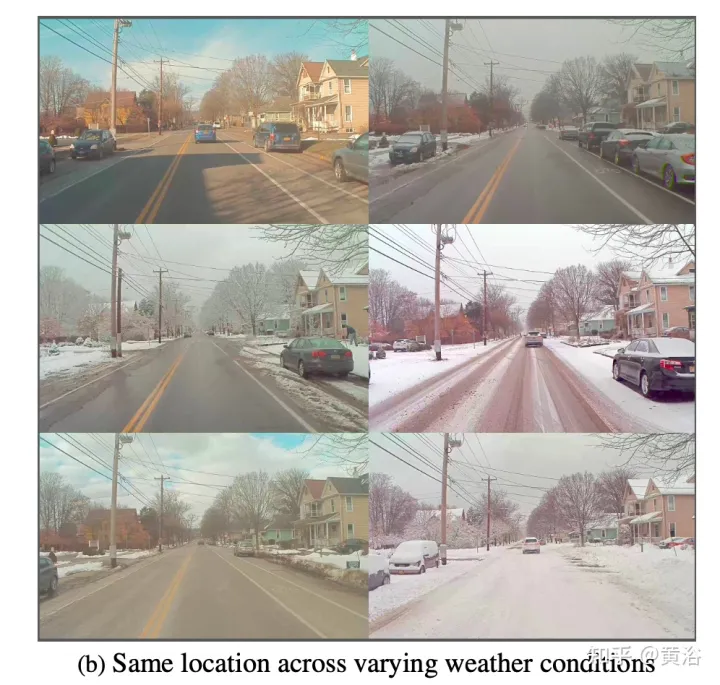
本文提出了一個實現穩健自主駕駛的資料集,採用一個新資料收集過程,即在不同場景(城市、公路、鄉村、校園)、天氣(雪、雨、太陽)、時間(白天/晚上)和交通條件(行人、自行車手和汽車)下,沿著15公里的路線重複記錄數據。
此資料集包括來自攝影機和光達感測器的影像和點雲,以及高精度GPS/INS,建立跨路線的對應關係。此資料集包括道路和目標標註,具有非模態(amodal)遮罩捕捉的局部遮擋和3-D邊框。
重複路徑為目標發現、連續學習和異常檢測開闢了新的研究方向。
Ithaca365連結:A new dataset to enable robust autonomous driving via a novel data collection process
##如圖是資料收集的感測器配置: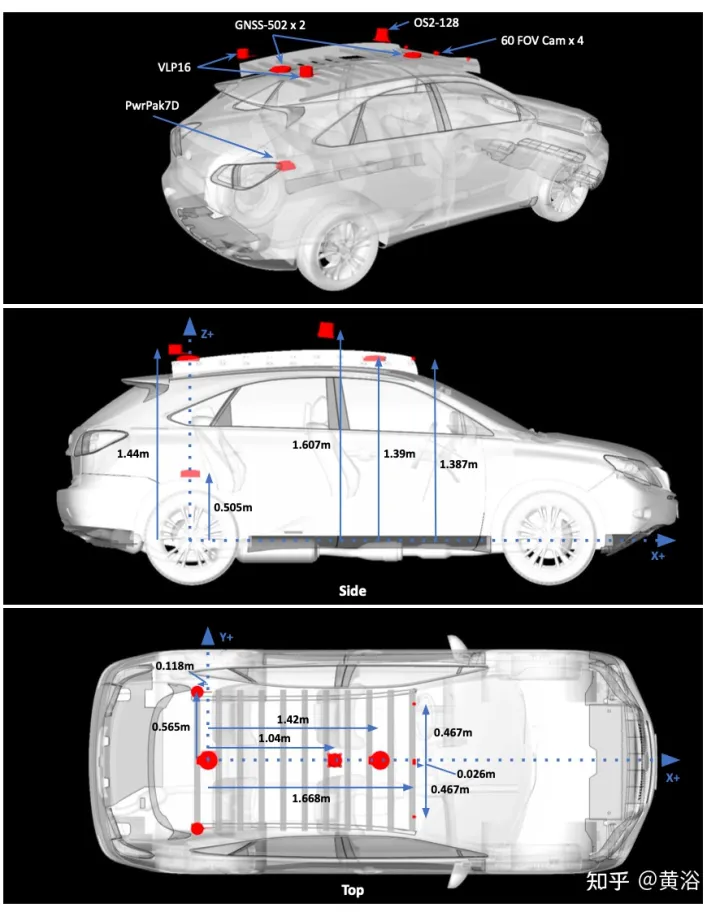
開發一個自訂標記工具,用於獲取道路和目標的非模態遮罩。對於不同環境條件下的道路標籤,例如積雪覆蓋的道路,用相同路線的重複遍歷。具體而言,透過GPS姿態和雷射雷達資料建構的點雲道路地圖,將「好天氣」的道路標籤轉換為「惡劣天氣」。 路線/資料分為76個區間。將點雲投影到BEV中,並使用多邊形標註器標記道路。一旦在BEV中標記了道路(生成2-D道路邊界),將多邊形分解為較小的150 m^2多邊形,採用平均高度1.5 m的閾值,多邊形邊界內的點做平面擬合來確定道路高度。 用RANSAC和迴歸器將平面擬合到這些點;然後用估計的地平面計算沿著邊界每個點的高度。將道路點投影到影像中,並建立深度(depth)掩碼,獲得道路的非模態標籤。將位置與帶有GPS的標記地圖匹配,並用ICP優化路線,可以將地平面投影到新收集路線的特定位置。 對ICP解決方案進行最終檢查,其方法是驗證道路標籤的平均投影真值掩碼與相同位置的所有其他真值掩碼符合80% mIOU;如果不符合,則查詢位置數據不會被檢索到。 非模態目標用Scale AI標記的六種前景目標類別:汽車、巴士、卡車(包括貨物、消防車、皮卡、救護車)、行人、自行車手和摩托車手。 這個標記範式有三個主要組成部分:首先識別目標的可見實例,然後推斷被遮蔽的實例分割掩碼,最後標記每個目標的遮蔽順序。在最左側的前方攝影機視圖上執行標記。遵循與KINS(「
Amodal instance segmentation with kins dataset「. CVPR,2019)相同的標準。
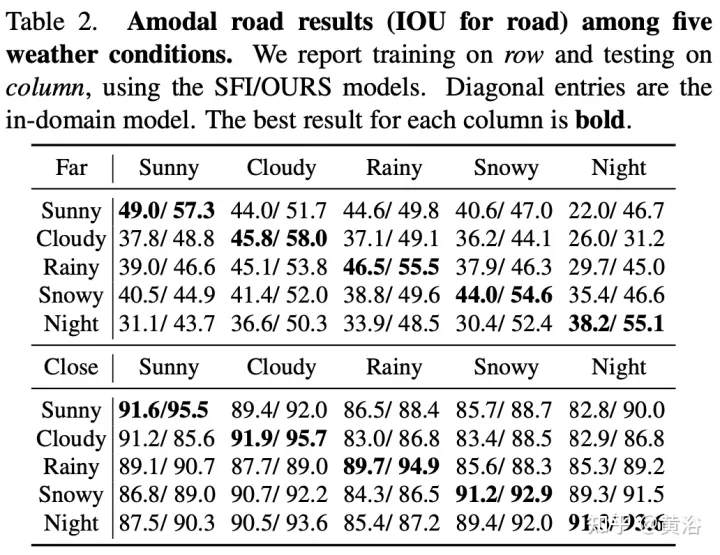
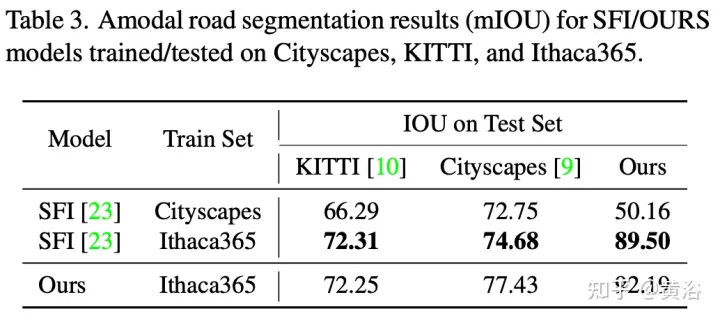
為了展示資料集的環境多樣性和非模態質量,訓練並測試了兩個基線網絡,以在像素級識別非模態道路,即使道路被雪或汽車覆蓋也能工作。第一個基線網路是Semantic Foreground Inpainting(SFI)。第二個基線,如圖所示,採用以下三個創新來改進SFI。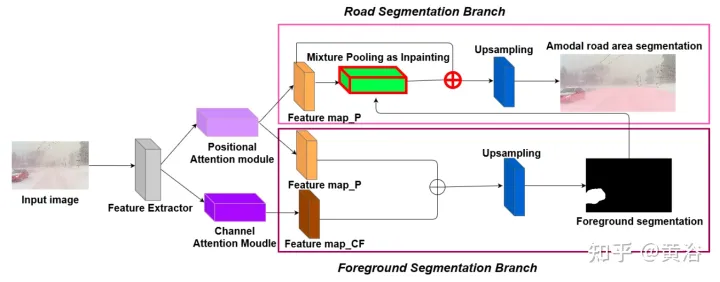
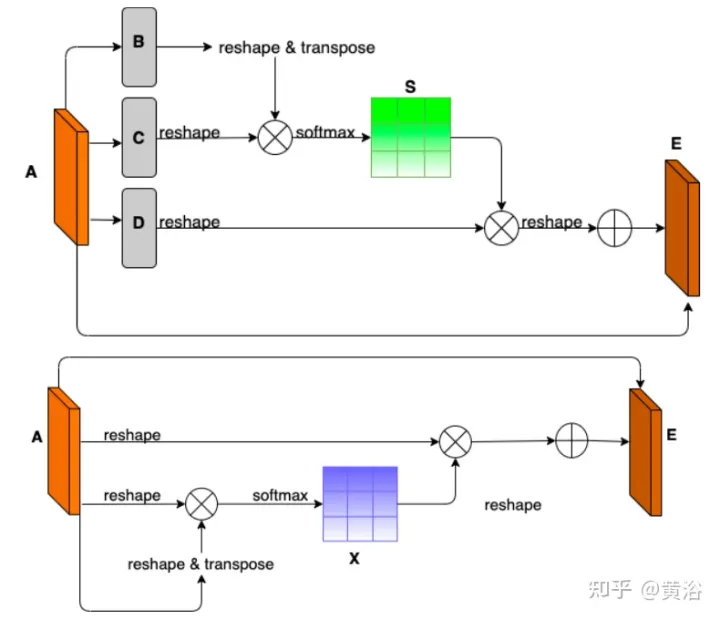
- 位置和通道注意:因為非模態分割主要推論什麼是不可見的,所以上下文是一個非常重要的線索。 DAN(“Dual attention network for scene segmentation“,CVPR‘2019)引進了兩項創新,捕捉兩種不同的背景。位置注意模組(PAM)使用像素特徵關注影像的其他像素,實際上從影像的其他部分捕獲上下文。通道注意模組(CAM)使用類似的注意機制,有效地聚集通道的資訊。這裡在主幹特徵提取器上應用這兩個模組。結合CAM和PAM更好地定位精細掩碼邊界。透過上採樣層獲得最終前景實例遮罩。
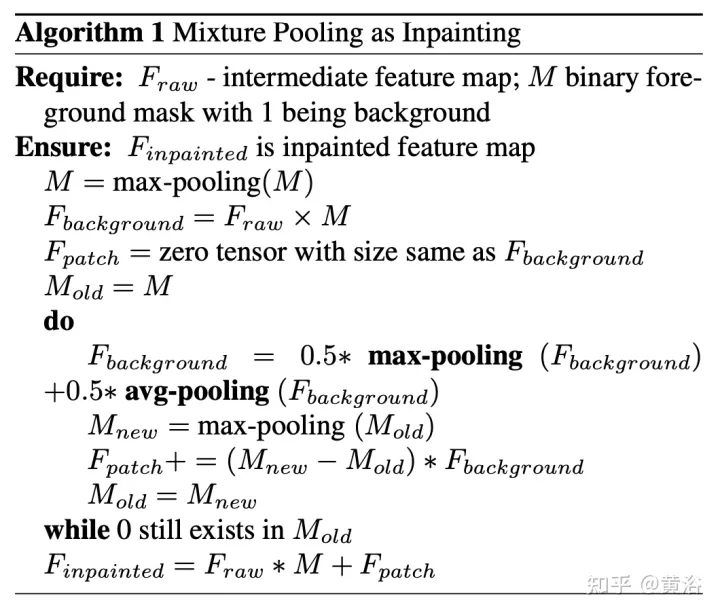
- 混合池化作修補(inpainting):最大池化作為修補操作,將重疊的前景特徵替換為附近的背景特徵,幫助恢復非模態道路特徵。然而,由於背景特徵通常是平滑分佈的,因此最大池化操作對添加的任何雜訊非常敏感。相反,平均池化操作可以自然地減輕雜訊。為此,結合平均池化和最大池化進行修補,稱為混合池化(Mixture Pooling)。
- 求和運算:在最後上取樣層之前,不直接傳遞來自混合池化模組的特徵,而是包含來自PAM模組輸出的殘餘連結。透過在道路分割分支中聯合優化兩個特徵圖,PAM模組還可以學習遮蔽區域的背景特徵。這可以帶來更準確地恢復背景特徵。
如圖是PAM與CAM的架構圖:
#混合池化做修補的演算法偽代碼如下所示:
非模態道路分割的訓練和測試程式碼如下:https://github #. com/coolgrasshopper/amodal_road_segmentation
實驗結果如下:
以上是在重複和挑戰性天氣條件下的資料集和駕駛感知的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 Windows 11 上的智慧型應用程式控制:如何開啟或關閉它
Jun 06, 2023 pm 11:10 PM
Windows 11 上的智慧型應用程式控制:如何開啟或關閉它
Jun 06, 2023 pm 11:10 PM
智慧型應用程式控制是Windows11中非常有用的工具,可幫助保護你的電腦免受可能損害資料的未經授權的應用程式(如勒索軟體或間諜軟體)的侵害。本文將解釋什麼是智慧型應用程式控制、它是如何運作的,以及如何在Windows11中開啟或關閉它。什麼是Windows11中的智慧型應用控制?智慧型應用程式控制(SAC)是Windows1122H2更新中引入的新安全功能。它與MicrosoftDefender或第三方防毒軟體一起運行,以阻止可能不必要的應用,這些應用程式可能會減慢設備速度、顯示意外廣告或執行其他意外操作。智慧應用
 五官亂飛,張嘴、瞪眼、挑眉,AI都能模仿到位,影片詐騙要防不住了
Dec 14, 2023 pm 11:30 PM
五官亂飛,張嘴、瞪眼、挑眉,AI都能模仿到位,影片詐騙要防不住了
Dec 14, 2023 pm 11:30 PM
好強大的AI模仿能力,真的防不住,完全防不住。現在AI的發展已經達到這種程度了嗎?你前腳讓自己的五官亂飛,後腳,一模一樣的表情就被復現出來,瞪眼、挑眉、噘嘴,不管多麼誇張的表情,都模仿的非常到位。加大難度,讓眉毛挑的再高些,眼睛睜的再大些,甚至連嘴型都是歪的,虛擬人物頭像也能完美復現表情。當你在左邊調整參數時,右邊的虛擬頭像也會相應地改變動作給嘴巴、眼睛一個特寫,模仿的不能說完全相同,只能說表情一模一樣(最右邊)。這項研究來自慕尼黑工業大學等機構,他們提出了GaussianAvatars,這種
 MotionLM:多智能體運動預測的語言建模技術
Oct 13, 2023 pm 12:09 PM
MotionLM:多智能體運動預測的語言建模技術
Oct 13, 2023 pm 12:09 PM
本文經自動駕駛之心公眾號授權轉載,轉載請洽出處。原標題:MotionLM:Multi-AgentMotionForecastingasLanguageModeling論文連結:https://arxiv.org/pdf/2309.16534.pdf作者單位:Waymo會議:ICCV2023論文想法:對於自動駕駛車輛安全規劃來說,可靠地預測道路代理未來行為是至關重要的。本研究將連續軌跡表示為離散運動令牌序列,並將多智能體運動預測視為語言建模任務。我們提出的模型MotionLM有以下幾個優點:首
 行人軌跡預測有哪些有效的方法和普遍的Base方法?頂會論文分享!
Oct 17, 2023 am 11:13 AM
行人軌跡預測有哪些有效的方法和普遍的Base方法?頂會論文分享!
Oct 17, 2023 am 11:13 AM
軌跡預測近兩年風頭正猛,但大都聚焦於車輛軌跡預測方向,自動駕駛之心今天就為大家分享頂會NeurIPS上關於行人軌跡預測的演算法—SHENet,在受限場景中人類的移動模式通常在一定程度上符合有限的規律。基於這個假設,SHENet透過學習隱含的場景規律來預測一個人的未來軌跡。文章已經授權自動駕駛之心原創!作者的個人理解由於人類運動的隨機性和主觀性,目前預測一個人的未來軌跡仍然是一個具有挑戰性的問題。然而,由於場景限制(例如平面圖、道路和障礙物)以及人與人或人與物體的互動性,在受限場景中人類的移動模式通
 為大模型提供全新科學複雜問答基準與評估體系,UNSW、阿貢、芝加哥大學等多家機構共同推出SciQAG框架
Jul 25, 2024 am 06:42 AM
為大模型提供全新科學複雜問答基準與評估體系,UNSW、阿貢、芝加哥大學等多家機構共同推出SciQAG框架
Jul 25, 2024 am 06:42 AM
編輯|ScienceAI問答(QA)資料集在推動自然語言處理(NLP)研究中發揮著至關重要的作用。高品質QA資料集不僅可以用於微調模型,也可以有效評估大語言模型(LLM)的能力,尤其是針對科學知識的理解和推理能力。儘管目前已有許多科學QA數據集,涵蓋了醫學、化學、生物等領域,但這些數據集仍有一些不足之處。其一,資料形式較為單一,大多數為多項選擇題(multiple-choicequestions),它們易於進行評估,但限制了模型的答案選擇範圍,無法充分測試模型的科學問題解答能力。相比之下,開放式問答
 一文讀懂智慧汽車滑板底盤
May 24, 2023 pm 12:01 PM
一文讀懂智慧汽車滑板底盤
May 24, 2023 pm 12:01 PM
01什麼是滑板底盤所謂滑板式底盤,即將電池、電動傳動系統、懸吊、煞車等零件提前整合在底盤上,實現車身和底盤的分離,設計解耦。基於這類平台,車企可以大幅降低前期研發和測試成本,同時快速回應市場需求打造不同的車款。尤其是無人駕駛時代,車內的佈局不再是以駕駛為中心,而是會注重空間屬性,有了滑板式底盤,可以為上部車艙的開發提供更多的可能。如上圖,當然我們看滑板底盤,不要上來就被「噢,就是非承載車身啊」的第一印象框住。當年沒有電動車,所以沒有幾百公斤的電池包,沒有能取消轉向柱的線傳轉向系統,沒有線傳煞車系
 GR-1傅利葉智慧通用人形機器人即將開始預售!
Sep 27, 2023 pm 08:41 PM
GR-1傅利葉智慧通用人形機器人即將開始預售!
Sep 27, 2023 pm 08:41 PM
身高1.65米,體重55公斤,全身44個自由度,能夠快速行走、敏捷避障、穩健上下坡、抗衝擊幹擾的人形機器人,現在可以帶回家了!傅利葉智慧的通用人形機器人GR-1已開啟預售機器人大講堂傅利葉智慧FourierGR-1通用人形機器人現已開放預售。 GR-1擁有高度仿生的軀幹構型和擬人化的運動控制,全身44個自由度,具備行走、避障、越障、上下坡、抗干擾、適應不同路面等運動能力,是通用人工智慧的理想載體。官網預售頁:www.fftai.cn/order#FourierGR-1#傅利葉智能需要改寫的內
 你知道程式設計師再過幾年會沒落?
Nov 08, 2023 am 11:17 AM
你知道程式設計師再過幾年會沒落?
Nov 08, 2023 am 11:17 AM
《ComputerWorld》雜誌曾經寫過一篇文章,說“編程到1960年就會消失”,因為IBM開發了一種新語言FORTRAN,這種新語言可以讓工程師寫出他們所需的數學公式,然後提交給電腦運行,所以程式設計就會終結。圖片又過了幾年,我們聽到了一種新說法:任何業務人員都可以使用業務術語來描述自己的問題,告訴電腦要做什麼,使用這種叫做COBOL的程式語言,公司不再需要程式設計師了。後來,據說IBM開發了一門名為RPG的新程式語言,可以讓員工填寫表格並產生報告,因此大部分企業的程式設計需求都可以透過它來完成圖
