
根據外媒Tech Xplore報道,位於德國斯圖加特的馬克斯普朗克智能係統研究所(MPI-IS)發明了一隻有四條腿的小機器狗Morti,它可以在每次跌倒後調整走路姿態,自主學習如何行走。
闡明該技術的論文《Learning Plastic Matching of Robot Dynamics in Closed-loop Central Pattern Generators》(在閉環中央模式生成器中學習機器人動力學的塑料匹配)已於7月18日在《自然·機器智能》雜誌上發表,該論文的第一作者是菲利克斯·魯珀特(Felix Ruppert)。
魯伯特說:「我們研究的機器狗Morti具有跟動物相同的反射能力,可以自主從失敗中學習如何走路。」
▲機器狗Morti
人類和動物的脊髓中都有一個叫做CPG(中樞模式發生器)的神經元網路。 CPG可以幫助生物完成節律性的任務,如走路、眨眼或消化等。這種神經元網路不需要大腦輸入訊號,就可以產生週期性的肌肉收縮。
魯伯特在Morti的背部安裝了一個虛擬脊髓來模擬CPG的作用,並在這個虛擬脊髓中安裝了樣本資料庫。 Morti平穩行走時,機器人腳上的感測器資料會持續與CPG樣本庫中的資料進行比較,以提供適當的行走姿勢。
如果機器人跌倒了,學習演算法會透過改變腿來回擺動的距離和速度來優化行走方式。在機器學習的過程中,CPG會發送一些自適應的運動訊號,讓機器人走得更平穩。這台機器學習過程的核心就是要改變CPG的輸出訊號,並監控機器在什麼情況下會遇到磕絆。
▲Morti根據回饋資料優化行走
Morti模仿了小動物學習走路的過程,它們都是在不斷跌倒後,才能找到最有效的肌肉使用方式,學會行走。魯伯特說,一開始,Morti會摔倒,但大約一個小時後,演算法就會幫Morti找到最好的行走方式。魯伯特也說:「目前我的團隊正在為Morti增加更多的感測器,擴大Mortimer的活動範圍。我們想讓Morti更像動物。」
行走同樣的距離,目前大多數工業四足機器人需要幾十上百瓦的電量,但Morti只需消耗5瓦電量。
這一方面是因為工業四足機器人有更大的體積和重量,需要更多的電量支撐行動,另一方面是因為Morti的演算法更聰明。
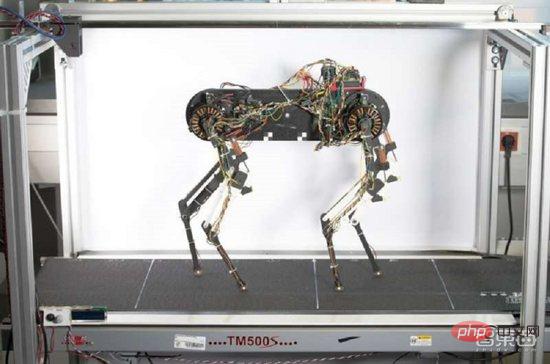
一般的機器人行走時,機器學習會透過大量計算,預先設計每條腿運動的細節,這會消耗大量的電力。但是Morti在走路跌倒後,可以根據新的演算法結果,重新調整走路的角度。 Morti透過這些回饋數據來學習行走方式,不需要進行大量計算。 Morti可以在學習走路的過程中降低能量消耗。研究發現,在Morti行走一個小時後,它消耗的能量比剛開始走路時減少了42%。
▲Morti在跑步機上行走
德州大學聖安東尼奧分校的教授迪瑞莎·庫迪蒂普迪(Dhireesha Kudithipudi)表示:「通常而言,人工智慧可以很好地學習一項特定任務,但人工智慧無法在環境變化時進行重新校準。而Morti可以根據數據回饋自主調整自己的運動模式,它在重新校準環境方面可能會表現得更好。」
魯伯特的機器狗可以透過人工智慧演算法,像生物一樣進行自主學習。這不僅結合了機器學習技術,也涉及了生物領域。
如果這種技術可以大規模使用,將會有兩個好處:第一,機器學習會更節能,消耗的能量更少。機器不必再根據大量的數據進行暴力計算,而是可以透過自主學習變得更加「聰明」。第二,這種技術可以為人工智慧領域和生物領域的結合帶來啟發。
目前,這種技術可以讓機器狗變得更像動物。未來,隨著這種技術的發展,機器人可能會變得更像人類。
以上是機器狗一小時就能學會走路?模仿動物本能,研究已登Nature子刊的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















