

扛住強風的無人機?加州理工用12分鐘飛行資料教會無人機禦風飛行

當風大到可以把傘吹壞的程度,無人機卻穩穩噹噹,就像這樣:
禦風飛行是空中飛行的一部分,從大的層面來講,當飛行員駕駛飛機著陸時,風速可能會給他們帶來挑戰;從小的層面來講,陣風也會影響無人機的飛行。
目前來看,無人機要麼在受控條件下飛行,無風;要麼由人類使用遙控器操作。無人機被研究者控制在開闊的天空中編隊飛行,但這些飛行通常是在理想的條件和環境下進行的。
然而,要讓無人機自主執行必要但日常的任務,例如運送包裹,無人機必須能夠即時適應風況。
為了讓無人機在風中飛行時具有更好的機動性,來自加州理工學院的一組工程師開發了一種深度神經網路Neural-Fly,即一種人工智慧工具,可以讓無人機在有風的情況下保持敏捷,只需更新一些關鍵參數,即可幫助無人機即時應對新的和未知的風況。
文章開頭我們已經初步見識到了無人機的抗風能力,下面展示了一架四旋翼無人機,借助該研究開發的工具,它可以在風速達到27 英里/ 小時的情況下完成8 字形穿梭操作:
#換個角度觀賞一下無人機禦風飛行:
為了讓無人機可以在各種風速下穿梭,數據是不可或缺的,這項研究需要的數據不多,在獲得短短12分鐘的飛行數據後,配備Neural-Fly 的自動四旋翼無人機就學會如何對強風做出反應。 「用到的資料量非常小,」加州理工學院航空航天系研究生 Michael O’Connell 表示,他是論文作者之一。
這項研究已於週三發表在《科學 · 機器人學》(Science Robotics) 雜誌上。
- 論文網址:https://www.science.org/doi/10.1126/scirobotics.abm6597
- arXiv 地址:https://arxiv.org/pdf/2205.06908.pdf
在Neural-Fly 實驗訓練中,無人機在風洞中飛行,有六種不同的風速,最快的是13.4 英里/ 小時。
根據這些數據,該團隊創建了深度神經網絡,然後讓他們的飛行器能夠熟練地在同一風洞中進行機動,例如以8 字形圖案放大大門或通過兩個橢圓形大門巡航。無人機在測試中的速度比它在訓練中遇到的速度更快:大約每小時 27 英里。這是該風洞可以產生的最大風速,該論文作者、加州理工學院研究生石冠亞指出。除了只需要少量資料外,該軟體僅在 Raspberry Pi 上運行,這是一種廉價的計算設備。
加州理工學院航太、控制和動力學系統教授、通訊作者Soon-Jo Chung 表示,他們看到的誤差率與現有的SOTA 技術相比,配備新系統的無人機飛行性能要好2.5 至4 倍。
下圖由左至右依序為石冠亞、Soon-Jo Chung 和 Michael O'Connell 。值得祝賀的是,石冠亞將在 2023 年 9 月入職卡內基美隆大學電腦學院機器人研究所擔任助理教授。
研究者表示,這項技術未來將被用於無人機快遞或飛行汽車。
Neural-Fly 技術概覽
#無人機(UAV)如果想要持續的商業化,在動態高速風中執行安全和精確的飛行機動至關重要。但是,由於不同風況之間的關係以及它們對無人機機動性的影響沒有深入研究,因此使用傳統控制設計方法來設計高效的機器人控制器具有挑戰性。
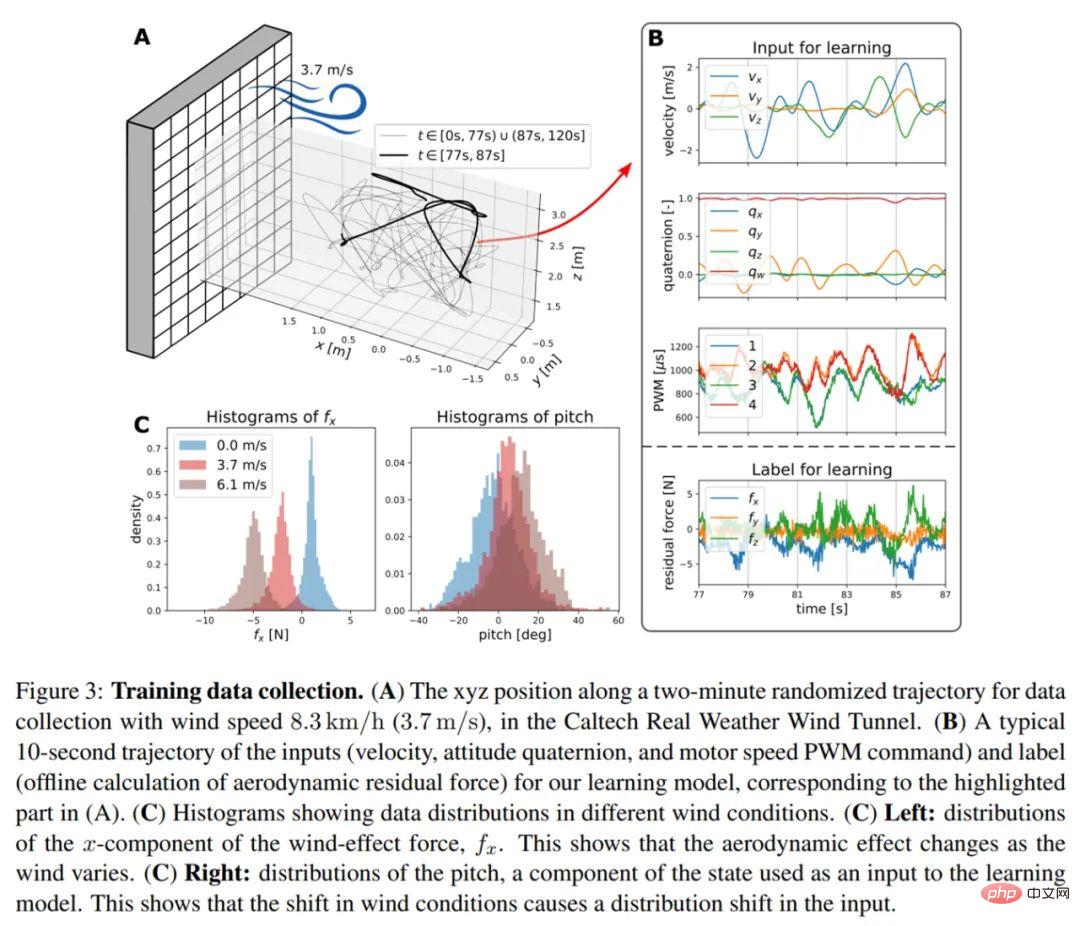
加州理工學院的研究者提出的「Neural-Fly」是一種資料驅動方法,它作為一種基於深度學習的軌跡追蹤控制器,可以學習快速適應快速變化的風況。下圖3(A) 為資料收集過程;3(B) 為風速13.3km/h (3.7m/s) 的情況下,訓練資料的輸入和標籤;3(C) 為不同風況下輸入資料和標籤資料的分佈。
線上自適應離線元學習
下圖2 為Neural-Fly 方法概覽,表明了它在自適應飛行控制和基於深度學習的機器人控制方面取得了進展。在標準 UAV 的動態風況下,Neural-Fly 實現了對靈活且具有挑戰性軌蹟的厘米級位置誤差追蹤。具體來說,該方法主要有兩個部分組成,分別是離線學習階段和用於即時線上學習的線上自適應控制階段。
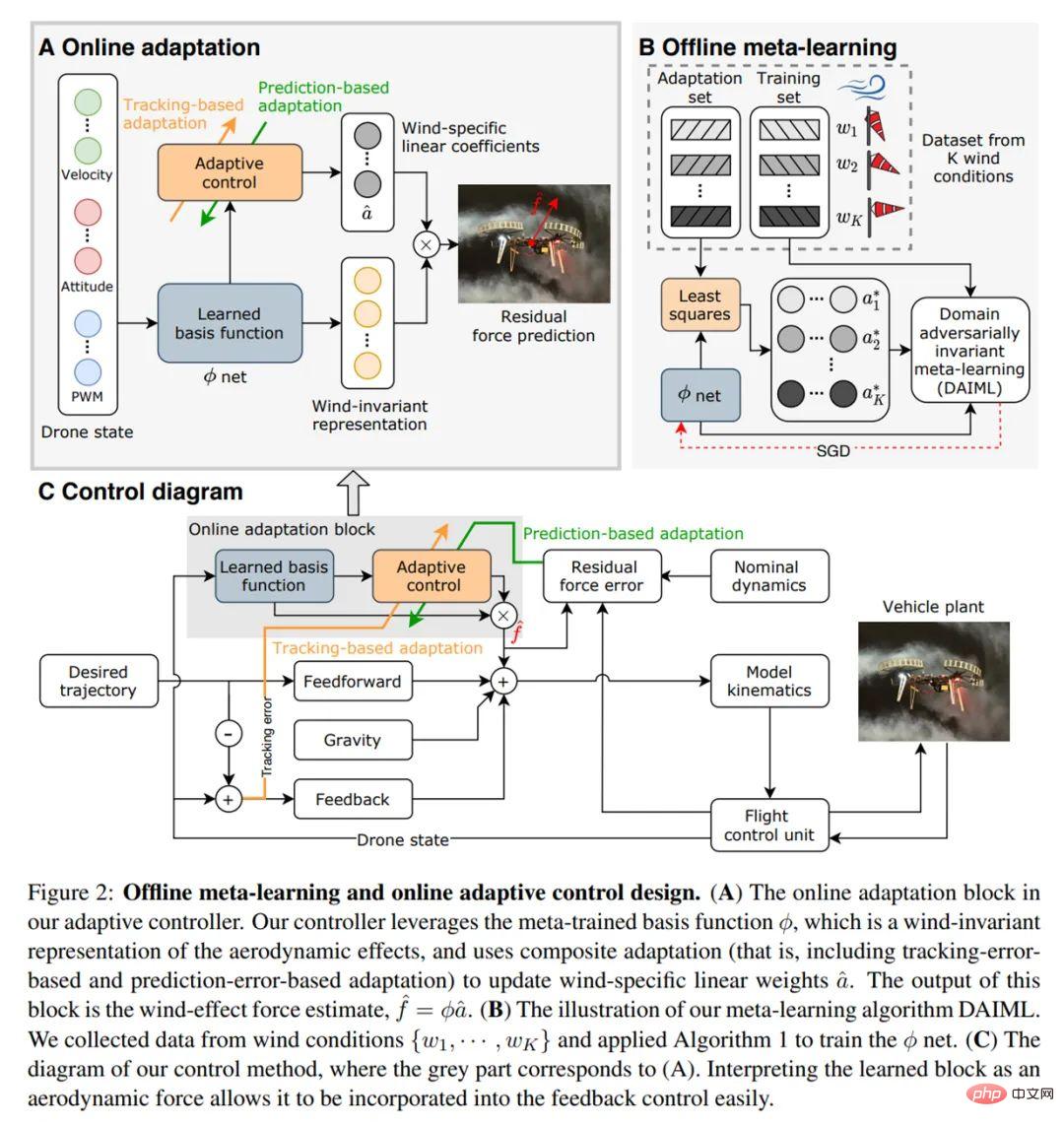
對於離線學習階段,研究者開發了領域對抗不變元學習(Domain Adversarially Invariant Meta-Learning, DAIML),它以一種數據高效的方式學習空氣動力學與風況無關的深度神經網路(DNN)表示。此表示法透過更新一組混合深度神經網路輸出的線性係數來適應不同的風況。
DAIML 還具有資料高效性,僅使用 6 種不同風況下共 12 分鐘的飛行資料來訓練深度神經網路。 DAIML 包含的幾種關鍵特性不僅可以提升資料效率,而且能夠由下游線上自適應控制階段提供資訊。
值得注意的是,DAIML 使用譜歸一化來控制深度神經網路的Lipschitz 屬性,以提高對未見過資料的泛化能力,並提供閉環穩定性和穩健性。此外,DAIML 還使用判別式網路來確保學得的表示具有風不變形,且風相關資訊僅包含在適應在線控制階段的線性係數中。
對於線上自適應控制階段,研究者發展了一種正則化複合自適應控制律,它是基於對學得表示如何與閉環控制系統互動的基本理解中得出的,並具有嚴格的理論支撐。
具體地,自適應律使用位置追蹤誤差項和氣動力預測誤差項的組合來對與風有關的線性係數進行更新。這種方法有效地保證了對任何風況的穩定和快速適應以及對不完美學習的穩健性。儘管這種自適應控制律能夠與許多學得的模型一起使用,但從 DAIML 中學習的精確表示有助於進一步提升自適應速度。
實驗結果
就Neural-Fly 的效果而言,它比非線性追蹤控制器平均提升66%,比L_1 自適應控制器提升42%,比增量非線性動態反演(INDI)控制器提升35%。所有這些結果都是使用標準四旋翼無人機硬體完成的,同時運行 PX4 的預設調節姿態控制。
即使與沒有外部風幹擾和使用更複雜硬體的相關工作(例如需要10 倍控制頻率和使用直流電動機速度回饋的板載光學感測器)相比,Neural- Fly 的追蹤性能也具有競爭力。
下表 1 為不同方法在不同風況下的誤差追蹤統計。
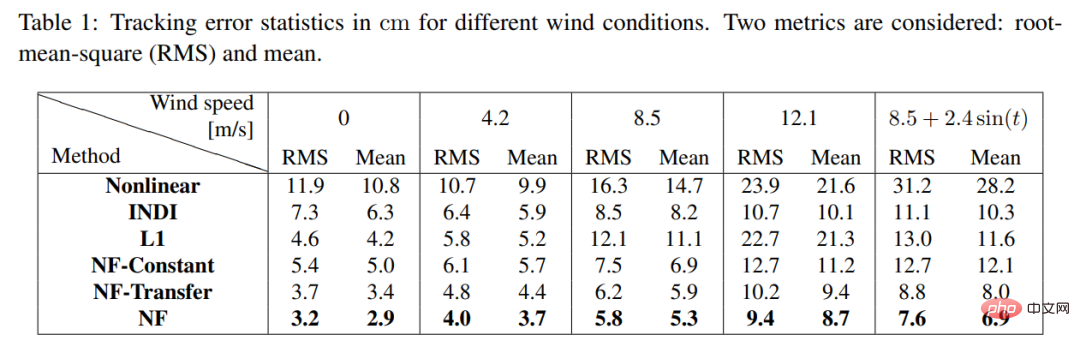
研究者將Neural-Fly 與兩個變體進行了比較,它們分別是Neural-Fly-Transfer 和Neural-Fly-Constant 。其中,NF-Transfer 使用從不同無人機的數據上訓練學得的表示,而 NF-Constant 僅使用具有 trivial 非學習基礎的自適應控制律。
Neural-Fly-Transfer 顯示了對無人機配置變化和模型不匹配的穩健性,NF-Constant、L_1 和INDI 方法都直接適應未知動力學,而不假設底層物理結構,它們具有相似的性能。
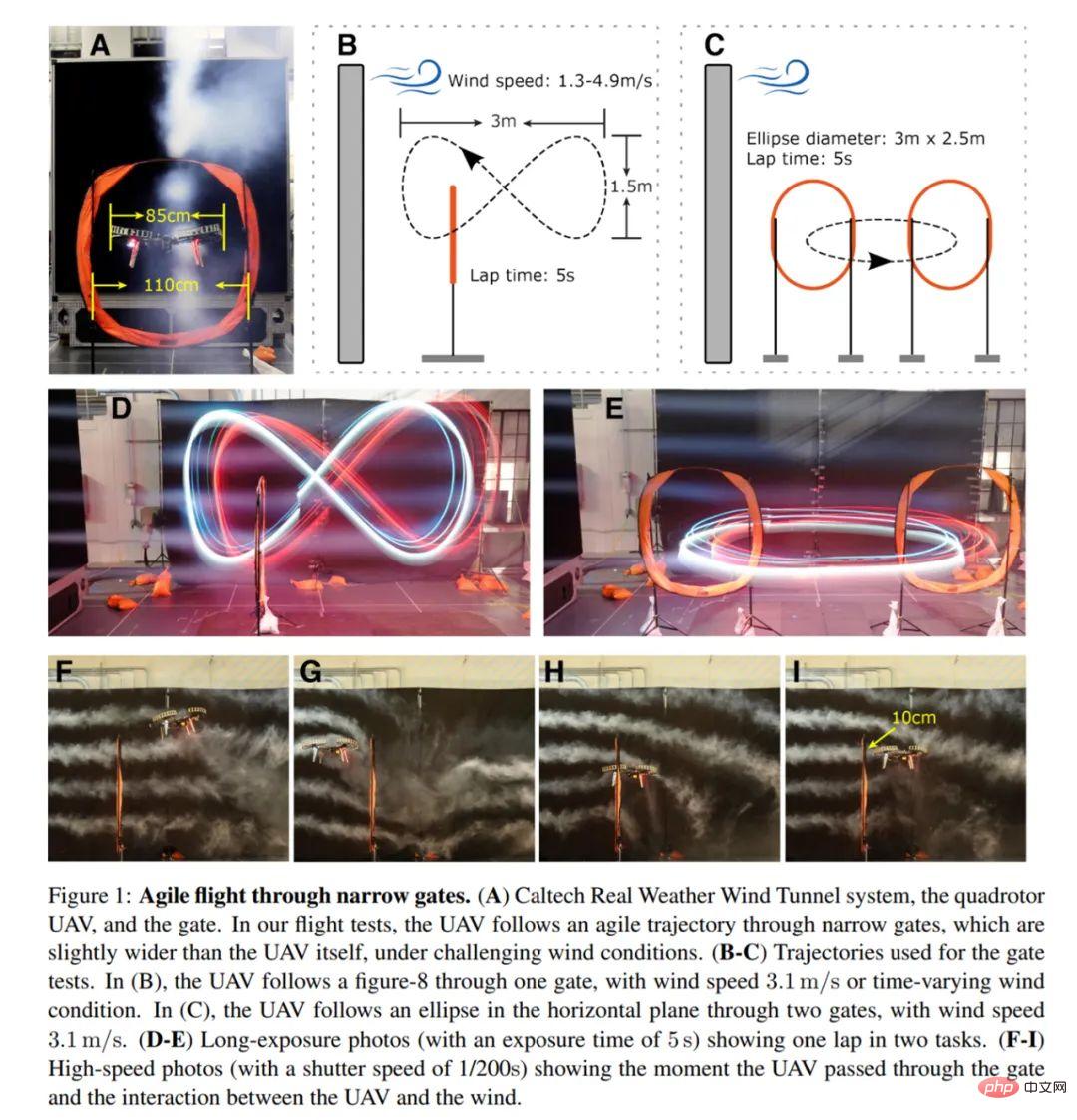
最後,研究者證明Neural-Fly 能夠實現一系列功能,允許無人機在狂風條件下遵循軌跡敏捷地飛過低高度門,具體如下圖1 所示。
以上是扛住強風的無人機?加州理工用12分鐘飛行資料教會無人機禦風飛行的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 位元組跳動剪映推出 SVIP 超級會員:連續包年 499 元,提供多種 AI 功能
Jun 28, 2024 am 03:51 AM
位元組跳動剪映推出 SVIP 超級會員:連續包年 499 元,提供多種 AI 功能
Jun 28, 2024 am 03:51 AM
本站6月27日訊息,剪映是由位元組跳動旗下臉萌科技開發的一款影片剪輯軟體,依託於抖音平台且基本面向該平台用戶製作短影片內容,並相容於iOS、安卓、Windows 、MacOS等作業系統。剪映官方宣布會員體系升級,推出全新SVIP,包含多種AI黑科技,例如智慧翻譯、智慧劃重點、智慧包裝、數位人合成等。價格方面,剪映SVIP月費79元,年費599元(本站註:折合每月49.9元),連續包月則為59元每月,連續包年為499元每年(折合每月41.6元) 。此外,剪映官方也表示,為提升用戶體驗,向已訂閱了原版VIP
 使用Rag和Sem-Rag提供上下文增強AI編碼助手
Jun 10, 2024 am 11:08 AM
使用Rag和Sem-Rag提供上下文增強AI編碼助手
Jun 10, 2024 am 11:08 AM
透過將檢索增強生成和語意記憶納入AI編碼助手,提升開發人員的生產力、效率和準確性。譯自EnhancingAICodingAssistantswithContextUsingRAGandSEM-RAG,作者JanakiramMSV。雖然基本AI程式設計助理自然有幫助,但由於依賴對軟體語言和編寫軟體最常見模式的整體理解,因此常常無法提供最相關和正確的程式碼建議。這些編碼助手產生的代碼適合解決他們負責解決的問題,但通常不符合各個團隊的編碼標準、慣例和風格。這通常會導致需要修改或完善其建議,以便將程式碼接受到應
 國產最大無人運輸機成功首飛:搭載中國航發 AEP100-A 發動機
Aug 23, 2024 am 07:32 AM
國產最大無人運輸機成功首飛:搭載中國航發 AEP100-A 發動機
Aug 23, 2024 am 07:32 AM
本站8月22日消息,中國航空發動機集團有限公司今日發文官宣,今日6時28分,由中國航發完全自主研發的900千瓦級渦槳發動機AEP100-A助力SA750U大型無人運輸機在陝西成功首飛。據介紹,AEP100-A渦槳發動機由中國航發動研所設計、南方製造,擁有高溫高原適應能力,採用三維氣動設計和單元體設計技術,在為航空器提供動力的同時,能夠提高燃油經濟性,提升航空器整體運作效率。 AEP100渦槳發動機系列可配裝2~6噸級通用飛機或3~10噸級無人機,綜合性能達到國際現役同級先進水準。本站早前報道
 微調真的能讓LLM學到新東西嗎:引入新知識可能讓模型產生更多的幻覺
Jun 11, 2024 pm 03:57 PM
微調真的能讓LLM學到新東西嗎:引入新知識可能讓模型產生更多的幻覺
Jun 11, 2024 pm 03:57 PM
大型語言模型(LLM)是在龐大的文字資料庫上訓練的,在那裡它們獲得了大量的實際知識。這些知識嵌入到它們的參數中,然後可以在需要時使用。這些模型的知識在訓練結束時被「具體化」。在預訓練結束時,模型實際上停止學習。對模型進行對齊或進行指令調優,讓模型學習如何充分利用這些知識,以及如何更自然地回應使用者的問題。但是有時模型知識是不夠的,儘管模型可以透過RAG存取外部內容,但透過微調使用模型適應新的領域被認為是有益的。這種微調是使用人工標註者或其他llm創建的輸入進行的,模型會遇到額外的實際知識並將其整合
 為大模型提供全新科學複雜問答基準與評估體系,UNSW、阿貢、芝加哥大學等多家機構共同推出SciQAG框架
Jul 25, 2024 am 06:42 AM
為大模型提供全新科學複雜問答基準與評估體系,UNSW、阿貢、芝加哥大學等多家機構共同推出SciQAG框架
Jul 25, 2024 am 06:42 AM
編輯|ScienceAI問答(QA)資料集在推動自然語言處理(NLP)研究中發揮著至關重要的作用。高品質QA資料集不僅可以用於微調模型,也可以有效評估大語言模型(LLM)的能力,尤其是針對科學知識的理解和推理能力。儘管目前已有許多科學QA數據集,涵蓋了醫學、化學、生物等領域,但這些數據集仍有一些不足之處。其一,資料形式較為單一,大多數為多項選擇題(multiple-choicequestions),它們易於進行評估,但限制了模型的答案選擇範圍,無法充分測試模型的科學問題解答能力。相比之下,開放式問答
 我國首台載重超 3 噸的大型無人運輸機「SA750U」成功首飛,全國產系統與材料
Aug 23, 2024 am 07:31 AM
我國首台載重超 3 噸的大型無人運輸機「SA750U」成功首飛,全國產系統與材料
Aug 23, 2024 am 07:31 AM
本站8月22日消息,根據「山河華宇」官方公眾號消息,今日6時28分,由山河華宇航空科技自主研發、山河星航戰略協同推進完成的SA750U大型無人運輸機從西安靖邊愛生無人機試驗測試中心成功首飛。 ▲圖來源「山河華宇」官方公眾號,下同據介紹,在40分鐘的飛行測試過程中,飛機各系統設備工作正常、狀態良好,飛機姿態平穩,性能符合設計指標,在完成了預定飛行科目後,飛機順利返航,首飛圓滿成功。 SA750U是我國第一型載重超3噸的大型無人運輸機,山河華宇公司僅用2年零8個月時間,便完成了從概念設計到首架機成功首飛全部
 SOTA性能,廈大多模態蛋白質-配體親和力預測AI方法,首次結合分子表面訊息
Jul 17, 2024 pm 06:37 PM
SOTA性能,廈大多模態蛋白質-配體親和力預測AI方法,首次結合分子表面訊息
Jul 17, 2024 pm 06:37 PM
編輯|KX在藥物研發領域,準確有效地預測蛋白質與配體的結合親和力對於藥物篩選和優化至關重要。然而,目前的研究並沒有考慮到分子表面訊息在蛋白質-配體相互作用中的重要作用。基於此,來自廈門大學的研究人員提出了一種新穎的多模態特徵提取(MFE)框架,該框架首次結合了蛋白質表面、3D結構和序列的信息,並使用交叉注意機制進行不同模態之間的特徵對齊。實驗結果表明,該方法在預測蛋白質-配體結合親和力方面取得了最先進的性能。此外,消融研究證明了該框架內蛋白質表面資訊和多模態特徵對齊的有效性和必要性。相關研究以「S
 SK 海力士 8 月 6 日將展示 AI 相關新品:12 層 HBM3E、321-high NAND 等
Aug 01, 2024 pm 09:40 PM
SK 海力士 8 月 6 日將展示 AI 相關新品:12 層 HBM3E、321-high NAND 等
Aug 01, 2024 pm 09:40 PM
本站8月1日消息,SK海力士今天(8月1日)發布博文,宣布將出席8月6日至8日,在美國加州聖克拉拉舉行的全球半導體記憶體峰會FMS2024,展示諸多新一代產品。未來記憶體和儲存高峰會(FutureMemoryandStorage)簡介前身是主要面向NAND供應商的快閃記憶體高峰會(FlashMemorySummit),在人工智慧技術日益受到關注的背景下,今年重新命名為未來記憶體和儲存高峰會(FutureMemoryandStorage),以邀請DRAM和儲存供應商等更多參與者。新產品SK海力士去年在
