

打破電力巡檢的邊界,少不了這些新技術

一架無人機穿梭在電力線路和桿塔之間,對輸電線路進行高精度拍照,拍攝完成的照片利用演算法進行高倍率壓縮,並通過無人機自帶的無線通訊能力,結合桿塔的複合光纖架空地線,快速傳輸到後端機房設備中,解壓縮後,恢復的圖片與拍攝完成的原始圖片幾乎無異,透過人工智慧對圖片進行分析,快速產生診斷結果發送給工作人員。這樣的電力巡檢模式不但更有效率,也很好地避免了人工巡檢過程中存在的各種安全隱患,這也成為許多國家在電力產業數位轉型中努力實現的目標。
以往,為了確保電力線路和電力系統的穩定運行,供電企業需要定期安排巡檢人員對線路與設備進行檢查,發現隱患。然而電力巡檢一直以來都是一份危險的苦差事,對巡檢人員來說,不但要做到精準,還需要兩班倒,耗時又耗力,一些設施甚至需要攀爬與「走鋼索」。對供電企業來說,由於該職位十分辛苦,用人成本自然也不低。
傳統電力巡檢-低效率與高風險並存
現在大多數電力電纜隧道、變電站、輸電線路、開閉所等設施主要採用的還是人工與少量環境監視器參與的巡檢方法。
傳統電力線路巡檢方法主要包括特殊標記法、條碼標識法和資訊鈕採集法。特殊標記法需要提前在電力線路塔桿上進行標記,巡檢人員透過這些標記確認桿塔狀態,缺點是容易受人為因素影響;條碼標識法同樣需要提前在桿塔上貼上條碼,透過存取條碼訊息來完成電力線路巡檢,雖然比特殊標記法便於操作,但條碼容易被破壞,而且沒有完全擺脫手工管理,影響準確性;信息鈕採集法,通過安裝不同編號的信息鈕,巡檢人員利用手持設備對資訊鈕進行掃描,存取並傳輸數據,完成電力線路資訊的分析與處理,但資訊鈕的安裝較為複雜,巡檢過程同樣需要工作人員實地操作,難以實現全面的線路管理。

傳統巡線模式不僅低效而且伴隨高風險,需要工人爬上輸電線路“走鋼索”,有些偏僻的地方還需要翻山越嶺才能檢查設備與線路的狀態,通常一人一天只能完成2 到3 個桿塔的巡視工作。根據國家能源局數據,2021 前三季國內累計發生事故 29 起,共死亡 34 人,可以看出傳統巡檢工作不僅效率低,而且很危險。
另外,傳統電力巡檢模式下,每位工作人員的責任感、專業能力、工作經驗等特質也參差不齊,這些因素也會影響巡檢品質和時長。對管理人員來說,單靠巡檢紀錄,難以對巡檢人員的工作品質進行準確評估,導致許多巡檢工作流於形式。
機器人—電力巡檢數位化第一步
當前,國內電力產業正積極響應數位經濟和數位中國建設,進行數位化轉型。結合智慧監測設備與數位化管理系統,將大幅降低日常巡檢工作的工作量,並有效提升巡檢質量,提升管理效率。
今年7 月,第五屆數位中國建設峰會上,阿里巴巴展示了一台“機器人電工”,它可以通過阿里雲導航演算法,設置路線後自動巡檢配電房,利用攝像頭和紅外線感測器發現故障。同年9 月,國網智能也與阿里雲在導航系統領域展開發展合作,首輪聚焦在輪式巡檢機器人產品,阿里達摩院的自動駕駛定位導航技術,可以幫助優化電力巡檢機器人的環境感知、地圖建構與規劃路徑能力,實現輪式巡檢機器人自主脫困、自主回充,提升機器人的穩定性與智慧化程度。

##變電站的輪式機器人
此輪式機器人可完成室外大場景的公分級高精建圖,地圖任意位置的定位初始化成功率達到98%,利用低成本多感測器融合定位,可實現「公分級」定位精度和障礙物辨識。綜合多感測器觀測的即時地形估計功能,可完成路徑規劃工作,在線上選擇安全路線,幫助機器人在複雜地形條件下穩健運作。
現階段,輪式機器人已經越來越多的參與電力巡檢工作,它可以徹底擺脫傳統的固定軌道,但面對複雜的地形環境,輪式機器人就難以完成這項工作了。相較之下,能夠在山路行走、上下樓梯的四腳機器人要靈活許多。

##波士頓動力Spot 四足機器人
四足機器人目前也在嘗試參與電力巡檢工作,其中最有名的就是波士頓動力已經在銷售的Spot。國內的機器人廠商也正在探索四足機器人的應用場景,例如上海電力電纜公司正嘗試用雲深處的絕影進行線路巡檢測試。儘管四足機器人技術仍有一定的發展空間,但不論是輪式還是四足機器人,對配電房、變電站等設施,它們都能夠提供很好的地面支援。
電力產業需要進行巡檢的設施不只是這些,坐落在城市、鄉村,甚至山區的桿塔,由於位置偏遠、環境複雜,需要更靈活的巡檢設備,基於無人機的巡檢模式正逐漸被採用。
無人機-電力巡檢的數位化「翅膀」
在山區,電力巡檢隨時需要面臨極端氣候與複雜地形的問題,例如在四川省的高原地區,四川送變電公司運維的輸電線路有不少建在陡峭的山崖之上,塔位海拔多數超過3000 米,高海拔環境下,稀薄的空氣將導致升力明顯變小,無人機維持飛行高度需要消耗更多電能,影響續航時間。
大疆為「悟」 Inspire 2 適配了高原槳,能保證在 5000 公尺海拔高度穩定飛行,在四川高原山區也能正常開展電力巡檢作業。另外,大疆精靈 Phantom 4、「禦」 Mavic 2 系列無人機配備通用槳,也可在 6000 公尺海拔高度安全飛行,無需根據海拔高度更換槳葉。

##大疆無人機在高海拔地區飛行
對於長續航需求,大疆經緯M200 V2 系列配備高容量TB55 電池,預留15~20% 的著陸電量,僅安裝禪思X5S 或禪思Z30 單雲台負載,經緯M200 V2 系列在高原山區電力巡檢續航時間可達22~27 分鐘,能較好適應高海拔嚴苛的飛行環境。
雖說無人機、機器人與攝影機的配合使用,已經可以讓電力巡檢工作的人力成本大幅減少,但受到體積限制,這些設備往往只具備高精度拍攝、自動導航等功能。嚴格來說,拍照並完成回傳只完成了巡檢工作的一半,而另一半工作的智慧化,則需要升級後端設施。
人工智慧-電力巡檢的「最強腦」
巡檢過程中設備拍攝的畫面,可以透過5G 網路快速傳遞到後端設備中,結合人工智慧,可以自動完成圖片的分析。
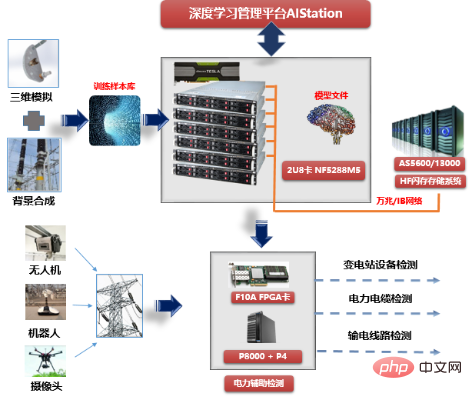
浪潮的“電力設備巡檢人工智慧解決方案”,正是這樣的工作模式,運用人工智慧技術識別及分析現場的電力設備圖片,完成樣本資料準備、模型訓練、模型應用,將無人機、機器人等設備收集的圖片,傳送到電站工作室部署的檢測伺服器中進行識別,快速完成智慧化診斷。
##類似的組合,也已經被部分地區的供電企業採用。國網寧波供電公司與中國移動共同開發的5G 無人機自主巡檢應用,無人機可依既定航線從機巢飛向巡檢點,利用自帶的高清攝像頭,精細化抓拍桿塔上絕緣子、導地線等細節,並透過5G 網路即時回傳、一旦辨識安全隱患,無人機會自動觸發處理機制,第一時間消除隱患,待完成任務後還將全自動精準降落回機巢。
國網山東省電力公司青島供電公司也自主研發了“基於5G 北斗的無人機智能巡檢系統”,建成5G SA 電力切片網絡數據高速安全傳輸系統,並結合基於深度學習算法的人工智慧診斷分析平台,能夠實現無人機自主巡檢、數據即時回傳、缺陷智慧分析,在國內率先形成基於北斗系統的無人機精準智慧巡檢方法。
寫在最後
新技術加持下,電力巡檢工作已經變得更有效率。公開資料顯示,深圳供電局採用無人機自主巡檢後,較傳統人工巡檢效率提升 2.6 倍;佛山高明供電局也實現了無人機自動駕駛巡檢全覆蓋,建成 385 個智慧電房。
未來,隨著電力巡檢機器人、無人機應用滲透率的提高,我國電力產業發生事故機率也將降低,電力作業和巡檢固有的高風險產業特性也可望改變。採用機器人與無人機,結合 5G、人工智慧等新技術的電力巡檢,也是電網智慧化、自動化發展的重要實現手段。
以上是打破電力巡檢的邊界,少不了這些新技術的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 2024年DJI無人機排行榜:每款銷售量都高達50000+,您用過哪一款呢?
Dec 16, 2023 pm 05:33 PM
2024年DJI無人機排行榜:每款銷售量都高達50000+,您用過哪一款呢?
Dec 16, 2023 pm 05:33 PM
哈嘍,您好!我是原呵呵,點點關注吧,更多精彩內容等著您隨著無人機技術的不斷進步,我們現在可以在幾千元的預算內購買一台最為重要和可靠的4K相機,這是幾年前難以想的。在大疆創新、Autel等公司的持續努力下,這項夢想已成為現實首選的整體無人機是DJIMavic3Pro,這款無人機不僅能夠提供超高清錄製,還具備出色的幀速率和持久的電池壽命。除了根據我個人的經驗,我還根據網路上正面的評價整理了一些其他頂級無人機供您選擇。現在,讓我們一起來看看這些令人興奮的選項吧整體最佳無人機:DJIMavic3Pr
 無人機蜂群:改變遊戲規則的國防應用技術
Nov 14, 2023 pm 08:53 PM
無人機蜂群:改變遊戲規則的國防應用技術
Nov 14, 2023 pm 08:53 PM
摘要:蜂群(Swarming)是一種顛覆性的、改變遊戲規則的技術,該技術涉及在多個領域(陸、海、空、太空)中協同部署多個無人系統。新型微電子、導引、導航、感測器和人工智慧技術的發展,使低成本微型無人機能夠執行具有挑戰性的任務。當與新型的決策流程、目標追蹤、通訊技術和演算法相結合時,蜂群可以在戰場上產生巨大影響。其還可用於提供持續且不易被偵測的監視能力以及關鍵的防禦能力,如攔截巡飛彈。本文描述了歐洲在蜂群領域的研究活動,並深入探討了其可能對國防領域的重大影響。關鍵字:無人機,自主能力,目標追踪,
 國產最大無人運輸機成功首飛:搭載中國航發 AEP100-A 發動機
Aug 23, 2024 am 07:32 AM
國產最大無人運輸機成功首飛:搭載中國航發 AEP100-A 發動機
Aug 23, 2024 am 07:32 AM
本站8月22日消息,中國航空發動機集團有限公司今日發文官宣,今日6時28分,由中國航發完全自主研發的900千瓦級渦槳發動機AEP100-A助力SA750U大型無人運輸機在陝西成功首飛。據介紹,AEP100-A渦槳發動機由中國航發動研所設計、南方製造,擁有高溫高原適應能力,採用三維氣動設計和單元體設計技術,在為航空器提供動力的同時,能夠提高燃油經濟性,提升航空器整體運作效率。 AEP100渦槳發動機系列可配裝2~6噸級通用飛機或3~10噸級無人機,綜合性能達到國際現役同級先進水準。本站早前報道
 我國首台載重超 3 噸的大型無人運輸機「SA750U」成功首飛,全國產系統與材料
Aug 23, 2024 am 07:31 AM
我國首台載重超 3 噸的大型無人運輸機「SA750U」成功首飛,全國產系統與材料
Aug 23, 2024 am 07:31 AM
本站8月22日消息,根據「山河華宇」官方公眾號消息,今日6時28分,由山河華宇航空科技自主研發、山河星航戰略協同推進完成的SA750U大型無人運輸機從西安靖邊愛生無人機試驗測試中心成功首飛。 ▲圖來源「山河華宇」官方公眾號,下同據介紹,在40分鐘的飛行測試過程中,飛機各系統設備工作正常、狀態良好,飛機姿態平穩,性能符合設計指標,在完成了預定飛行科目後,飛機順利返航,首飛圓滿成功。 SA750U是我國第一型載重超3噸的大型無人運輸機,山河華宇公司僅用2年零8個月時間,便完成了從概念設計到首架機成功首飛全部
 翼龍無人機再度騰空,成為甘肅的空中基地台
Dec 21, 2023 am 08:13 AM
翼龍無人機再度騰空,成為甘肅的空中基地台
Dec 21, 2023 am 08:13 AM
翼龍-2H無人機再次前往甘肅省積石山縣,執行災情偵察及緊急通訊保障等救災任務。該型無人機被稱為“空中基地台”,能夠持續恢復移動、聯通、電信的公網信號網絡,定向恢復50平方公里的公網通信,並建立覆蓋15000平方公里的音視頻通信網絡。翼龍-2H在2021年河南鄭州特大暴雨災害救援以及2022年四川瀘定地震救援中表現出色,成功完成任務原文來源:央視軍事微博
 國產翼龍系列無人機:譜寫多領域應用新篇章,涵蓋氣象、緊急、安防等眾多領域
Dec 01, 2023 pm 05:47 PM
國產翼龍系列無人機:譜寫多領域應用新篇章,涵蓋氣象、緊急、安防等眾多領域
Dec 01, 2023 pm 05:47 PM
根據科技日報消息11月28日,在位於四川自貢的中航無人機現場,中國航空工業集團有限公司舉行了一場以「大國之翼龍行天下」為主題的開放日活動,全面展示國產大型高端無人機研發及產業建設的發展成就。經過十幾年的發展,中航無人機自主研發的國產「翼龍」系列無人機產品已形成譜系化。翼龍-2亮相國企開放日現場,並進行了飛行表演。翼龍-2是由航空工業開發的中高空、長航時多用途無人機系統,具備全天時、全天候、全疆域、多場景任務執行能力。該無人機系統是我國第一型國產渦槳動力大型無人機系統,具有先進的氣動佈局、機體結構、
 中國移動:無人機咖啡配送首次落地試飛成功
Jun 01, 2024 pm 12:30 PM
中國移動:無人機咖啡配送首次落地試飛成功
Jun 01, 2024 pm 12:30 PM
感謝網友航空先生的線索投遞! 5月29日消息,中國移動宣布,中國移動和成都天府新區投資集團共同打造的無人機咖啡配送首次落地試飛成功。 ▲成都科創島,一架六旋翼無人機正在起飛點「等單」從成都天投獲悉,該架物流無人機的飛行速度是15米/秒,也就是一分鐘可達900米,承重4.5公斤以內,常規10分鐘即可完成單程物流配送。目前成都科創生態島無人機配送航線計畫1號館到W7,後續將涵蓋全島以及興隆湖周邊熱點區域。 ▲接到訂單後,咖啡師將飲品放進無人機「運輸倉」內與其他無人機不同的是,物流無人機由後台操作,不需要專
 松下將量產無人機用全固態電池,號稱 3 分鐘充電 80%
Sep 21, 2023 pm 08:21 PM
松下將量產無人機用全固態電池,號稱 3 分鐘充電 80%
Sep 21, 2023 pm 08:21 PM
松下控股於9月12日宣布,計畫在2020年代後半期(即2025年至2029年)開始大規模生產目前正在為無人機等應用開發的小型全固態電池。根據日經新聞報道松下控股表示,如果能夠實現實用化,預計3分鐘左右就能充滿無人機電池容量的80%。與充電需要1小時左右的現有鋰離子電池相比,便利性將大幅提升。松下控股首次向媒體和客戶企業公開了技術演示,並介紹了全固態電池。雖然沒有公佈金屬材料的組成等詳情,但官方表示預計可以充放電數萬次,將遠遠超過普通鋰離子電池的約3000次充放電次數。全固態電池作為新一代車用電池備
