

認真的嗎?讓機器狗當守門員,還發了篇論文

讓一個機器狗擔任足球守門員,可靠嗎?靠不靠譜,我們先看看效果在下結論。
工作人員一次很溫和的進攻,機器狗攔住了球:

加點難度,來個拋物線進球,也不再話下:

#用手拋球有作弊嫌疑?用腳試試,機器狗也能把球門守的死死的

#有趣的是,該研究還嘗試讓一隻機器狗踢球,另一隻當守門員,兩隻機器狗自己也能玩挺好:

看完效果,感覺機器狗當守門員還挺靠譜。這款機器狗是MIT 在2019 年研發的Mini Cheetah,現在來自加州大學柏克萊分校等機構的研究者為Mini Cheetah 部署了一個新的強化學習框架,讓它完成足球守門任務,守門成功率高達87.5% 。
論文網址:https://arxiv.org/pdf/2210.04435.pdf
4 公尺開外踢球
Mini Cheetah 只用不到1 秒成功守門
讓Mini Cheetah 學會守門還是一件比較難的事,因為這涉及物體(例如球)拋出的高度以及動態移動的位置,具體而言,一方操縱一個快速移動的球,球的方向和位置不確定,而另一方需要迅速判斷球的位置以阻止進球。想要完成這項任務,需要教導機器人動態移動它的身體,同時確保它的腳 (或臉) 到達它們需要及時阻擋球的地方,這基本上是將兩個難題結合在一起。
該研究的解決方案是將運動控制器與末端執行器軌跡規劃相結合,這樣一來就可以找到最佳的方法讓Mini Cheetah 在球到達目標不到一秒的時間內,進行阻擋。
完成上述過程,還需要訓練Mini Cheetah 掌握一套有用的守門員技能,例如Mini Cheetah 需要掌握在地面附近和靠近地面的地方對球進行側身攔截、掌握俯衝到達球門的下角技術、跳躍到球門的頂部和上角。完成這些動作,Mini Cheetah 都可以恢復並最終安全著陸。每個技能的參考動作都是手動編程的,在模擬中進行訓練,然後直接遷移到機器人。
Mini Cheetah 防守的球門寬 1.5m,高 0.9m,球(3 號)從約 4m 外踢出,球被外部跟踪,然後 Mini Cheetah 攔球。讓這麼小的機器狗完成攔球動作,表現是令人印象深刻的。

該研究表明,這款機器狗系統可以將在模擬中學習到的動態動作和守門員技能遷移到一個真正的四足機器人上,在現實世界中,對隨機射門的守門成功率為87.5%。而人類足球守門員的平均成功率是 69%。研究人員表示,他們所提出的框架可以擴展到其他場景,例如多技能足球。
下面我們來看看支持這台機器狗的背後框架。
分層強化學習框架
首先,讓四足機器人成為足球守門員是一個很有挑戰性的問題,因為它必須同時解決預測物體運動軌跡和機器人捕獲非抓握物體(球體)兩個實際問題。機器人需要在很短的時間內(通常不到一秒)對空中飛行的球做出反應並攔截。
為了完成這個挑戰,研究團隊提出了一個分層無模型強化學習 (RL) 框架。該框架包含一個針對不同運動技能的多個控制策略,涵蓋了目標的不同區域。

這些控制策略讓機器人能夠追蹤隨機參數化末端執行器的軌跡,同時執行特定的運動技能,例如跳躍攔球、撲球和順勢攔住地面滾動的球。

RL 框架中包含一個高階規劃器,它可協助機器人確定所需的運動技能和規劃末端執行器軌跡,以攔截飛向不同目標區域的球。
該研究在MIT 2019 年提出的Mini Cheetah 四足機器人上部署了上述RL 框架,實驗表明這種RL 框架能夠讓四足機器人有效攔截現實世界中快速移動的球。

先前對四足機器人 RL 框架的研究主要集中在低階運動控制上,例如讓機器人以要求速度步行、模仿參考運動。而研究提出的框架將學習到的運動技能擴展到更高級別的任務上,成功使用高級規劃讓四足機器人以敏捷的動作精確攔截快速移動的足球。這對四足機器人的高階規劃控制具有重要意義。
以上是認真的嗎?讓機器狗當守門員,還發了篇論文的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 Stable Diffusion 3論文終於發布,架構細節大揭秘,對復現Sora有幫助?
Mar 06, 2024 pm 05:34 PM
Stable Diffusion 3論文終於發布,架構細節大揭秘,對復現Sora有幫助?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3的论文终于来了!这个模型于两周前发布,采用了与Sora相同的DiT(DiffusionTransformer)架构,一经发布就引起了不小的轰动。与之前版本相比,StableDiffusion3生成的图质量有了显著提升,现在支持多主题提示,并且文字书写效果也得到了改善,不再出现乱码情况。StabilityAI指出,StableDiffusion3是一个系列模型,其参数量从800M到8B不等。这一参数范围意味着该模型可以在许多便携设备上直接运行,从而显著降低了使用AI
 ICCV'23論文頒獎「神仙打架」! Meta分割一切和ControlNet共同入選,還有一篇讓評審很驚訝
Oct 04, 2023 pm 08:37 PM
ICCV'23論文頒獎「神仙打架」! Meta分割一切和ControlNet共同入選,還有一篇讓評審很驚訝
Oct 04, 2023 pm 08:37 PM
在法國巴黎舉行的電腦視覺頂峰大會ICCV2023剛結束!今年的最佳論文獎,簡直是「神仙打架」。例如,兩篇獲得最佳論文獎的論文中,就包括顛覆文生圖AI領域的著作-ControlNet。自從開源以來,ControlNet已經在GitHub上獲得了24k個星星。無論是對於擴散模型還是整個電腦視覺領域來說,這篇論文的獲獎都是實至名歸的而最佳論文獎榮譽提名,則頒給了另一篇同樣出名的論文,Meta的「分割一切”模型SAM。自推出以來,“分割一切”已經成為了各種圖像分割AI模型的“標竿”,包括後來居上的
 雲端深處發表產業應用旗艦機器狗絕影X30
Oct 11, 2023 pm 09:45 PM
雲端深處發表產業應用旗艦機器狗絕影X30
Oct 11, 2023 pm 09:45 PM
10月9日,雲深處科技發表「絕影X30」四足機器人,作為面向產業應用的新一代產業級產品,針對電站、工廠、管廊巡檢、以及緊急救援、消防偵查、未來科研等多領域核心訴求,帶來全球領先的產業能力:獨創的融合感知能力,在亞洲率先實現多變環境下快速穩健越障、上下鏤空工業樓梯、白天黑夜全天候自主巡檢,打破更多場景限制,且能針對突發任務快速反應;在亞洲首次將四足機器人的使用溫度範圍擴展至-20℃至55℃,大幅拓寬應用地區與季節;自帶即時監控系統及緊急處理系統,保障智能作業更加安全高效。工信部等十七部門印發《「機
 論文插圖也能自動生成了,用到了擴散模型,還被ICLR接收
Jun 27, 2023 pm 05:46 PM
論文插圖也能自動生成了,用到了擴散模型,還被ICLR接收
Jun 27, 2023 pm 05:46 PM
生成式AI已經風靡了人工智慧社區,無論是個人還是企業,都開始熱衷於創建相關的模態轉換應用,例如文生圖、文生影片、文生音樂等等。最近呢,來自ServiceNowResearch、LIVIA等科研機構的幾位研究者嘗試以文字描述來產生論文中的圖表。為此,他們提出了一種FigGen的新方法,相關論文也被ICLR2023收錄為了TinyPaper。圖片論文網址:https://arxiv.org/pdf/2306.00800.pdf也許有人會問了,產生論文中的圖表有什麼難的呢?這樣做對科學研究又有哪些幫助呢
 聊天截圖曝出AI頂會審稿潛規則! AAAI 3000塊即可strong accept?
Apr 12, 2023 am 08:34 AM
聊天截圖曝出AI頂會審稿潛規則! AAAI 3000塊即可strong accept?
Apr 12, 2023 am 08:34 AM
正值AAAI 2023論文截止提交之際,知乎上突然出現了一張AI投稿群的匿名聊天截圖。其中有人聲稱,自己可以提供「3000塊一個strong accept」的服務。爆料一出,頓時引起了網友的公憤。不過,先不要急。知乎大佬「微調」表示,這大機率只是「口嗨」而已。根據「微調」透露,打招呼和團體犯案這個是任何領域都不能避免的問題。隨著openreview的興起,cmt的各種缺點也越來越清楚,未來留給小圈子操作的空間會變小,但永遠會有空間。因為這是個人的問題,不是投稿系統和機制的問題。引入open r
 NeRF與自動駕駛的前世今生,近10篇論文總結!
Nov 14, 2023 pm 03:09 PM
NeRF與自動駕駛的前世今生,近10篇論文總結!
Nov 14, 2023 pm 03:09 PM
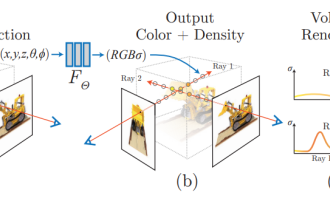
神經輻射場(NeuralRadianceFields)自2020年被提出以來,相關論文數量呈指數增長,不僅成為了三維重建的重要分支方向,也逐漸作為自動駕駛重要工具活躍在研究前沿。 NeRF這兩年異軍突起,主要因為它跳過了傳統CV重建pipeline的特徵點提取和匹配、對極幾何與三角化、PnP加BundleAdjustment等步驟,甚至跳過mesh的重建、貼圖和光追,直接從2D輸入影像學習一個輻射場,然後從輻射場輸出逼近真實照片的渲染影像。也就是說,讓一個基於神經網路的隱式三維模型,去擬合指定視角
 邊噴火邊跳踢踏舞,機器狗最新技能爆火全網!網友直呼真‧熱狗
Jun 28, 2023 pm 06:20 PM
邊噴火邊跳踢踏舞,機器狗最新技能爆火全網!網友直呼真‧熱狗
Jun 28, 2023 pm 06:20 PM
繼馬斯克搞出火焰噴射器後,現在連機器狗也學會噴火了。站起,瞄準,噴火,一整套動作一氣呵成——不僅如此,甚至還能一邊噴火一邊跳“踢踏舞”:這段神奇的視頻,在Reddit迅速獲得了7000+熱度,有網友調侃:謝謝你提醒我重溫《黑鏡》。圖片圖片還有網友建議給它改名熱狗:「我知道一定有人這樣叫它的。」圖片所以,這隻「熱狗」究竟長啥樣?噴火機器狗長啥樣?這隻噴火機器狗名叫Thermonator,來自一家名叫ThrowFlame的公司。據官網顯示,它的重量在16kg左右(37lbs),大小約76×51×51
 華人團隊斬獲最佳論文、最佳系統論文獎項,CoRL研究成果獲獎公佈
Nov 10, 2023 pm 02:21 PM
華人團隊斬獲最佳論文、最佳系統論文獎項,CoRL研究成果獲獎公佈
Nov 10, 2023 pm 02:21 PM
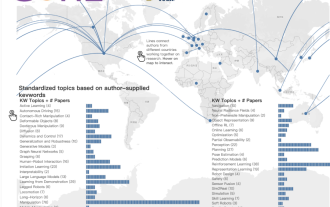
自2017年首次舉辦以來,CoRL已成為了機器人學與機器學習交叉領域的全球頂級學術會議之一。 CoRL是機器人學習研究的單一主題會議,涵蓋了機器人學、機器學習和控制等多個主題,包括理論與應用2023年的CoRL大會將於11月6日至9日在美國亞特蘭大舉行。根據官方數據透露,今年有來自25個國家的199篇論文入選CoRL。熱門主題包括操作、強化學習等。雖然相較於AAAI、CVPR等大型AI學術會議,CoRL的規模較小,但隨著今年大模型、具身智能、人形機器人等概念的熱度上升,值得關注的相關研究也會
