

探討自動駕駛軌跡預測技術的現況及發展趨勢

1 何為軌跡預測
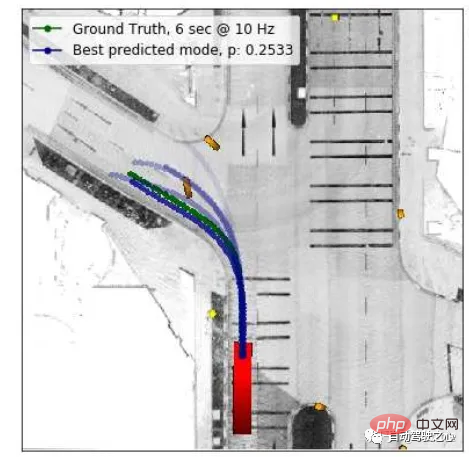
自動駕駛中,軌跡預測一般位於感知模組的後端,規則控制的前端,為承上啟動的模組。輸入為感知模組提供的目標track的state訊息、道路結構訊息,綜合考量高精地圖訊息、目標間的互動訊息,環境的語意訊息及目標的意圖訊息,對感知到的各類目標做出意圖預測(cut in/out、直行)以及未來一段時間的軌跡預測(0-5s不等)。如下圖所示。
ADAS系統需要對周遭環境資訊有一定認知能力,最基本的層次是要辨識環境,再上一層則需要理解環境,而再上一層則需要對環境進行預測。在對目標進行預測後,規控便可根據預測訊息進行自車的路徑規劃,並做出決策對可能出現的危險情況進行製動或發出告警,這便是軌跡預測模組存在的意義所在。
2 兩個挑戰
軌跡預測可分為短期預測與長期預測。
- 短期預測一般根據運動學模型(CV/CA/CTRV/CTRA)基於目前的目標state資訊預測未來一段時間的軌跡,一般
- 長期預測是目前業界主要在做的。這種預測僅基於運動模型就不合適了,一般需要做意圖預測,並結合一些上下文資訊(地圖、目標間交互資訊)才能得到不錯的結果。此時業界有許多不同的輸出形式,例如輸出軌跡的機率分佈、輸出多條預測軌跡、輸出一條可能性最大的預測軌跡。
對於長期的軌跡預測有兩個挑戰:
- 輸出一條可能的軌跡或是輸出所有可能的軌跡都是不合理的。你輸出一條預測軌跡就可能漏掉真正的軌跡,你輸出所有可能的軌跡就會出現誤報的情況,這對ADAS系統都是不可接受的。應該考慮把預測軌跡限制在適當的子集。
- 對軌跡預測做的越多就需要做更多的假設。極端一點的假設就是假定道路上的所有的目標都遵守交通規則。這如果用於交通模擬功能是合理的,但是對adas系統並不合適,他需要對潛在的危險情況保持敏感。
影響做長期軌跡預測的不確定性主要來自三個面向:
- 感知模組輸出的目標state估計的不確定。
- 駕駛意圖預測的不確定性。
- 從意圖辨識完與車輛機動性改變中間的不確定性。
3 主要考慮
#對軌跡預測系統應該考慮的四個問題:
- #軌跡預測要對潛在的危險有敏感性,這是軌跡預測存在的意義要求的。
- 既要考慮運行模型也要考慮意圖與周圍環境的資訊。
- 考慮上述的不確定性。
- 考慮輸出的軌跡數量問題。
4 業界方法
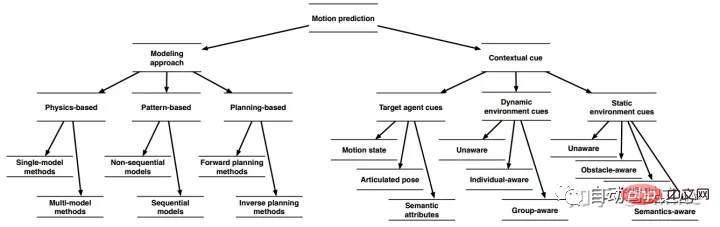
#如下圖為bosch公司發表綜述論文[2]中的分類方法。
- 如果依照使用模型的差異來分類,軌跡預測方法可以分為使用實體模型的方法、使用學習的方法、使用規劃演算法的方法。
- 如果依照使用的資訊來分類,軌跡預測方法可以分為使用目標的資訊的方法、使用環境中的動態目標資訊的方法、使用靜態環境資訊的方法。
軌跡預測具體會牽涉到哪些通用演算法呢?
- 意圖預測:模糊理論、static BNs、DBN(HMM、JumpMM)、DS證據理論、機器學習中的分類演算法。
- 深度學習相關,端對端輸出。 CNN、LSTM、RNN、Attention。
那軌跡預測可以使用哪些具體資訊呢?
- 目標訊息:當前/歷史的速度與位置訊息,如果是行人軌跡預測的話,還可使用行人頭的朝向、關節資訊、性別與年齡資訊以及人的注意力訊息。
- 環境中的動態目標訊息:social force、吸引力、群體限制資訊。
- 靜態環境資訊:free space、map、語意資訊(道路結構/交通規則/目前交通號誌燈)。
目前學術界軌跡預測的論文越來越多,主要原因還是業界沒有行之有效的方法。
以下列舉業界論文:
#BMW##:物理模型意圖預測(learning-based)。使用啟發式的方法整合專家知識,簡化了互動模型,在意圖預測的分類模型中加入了博弈論想法[3]。
BENZ#:主要為意圖預測的相關論文,使用的是DBN[4] 。
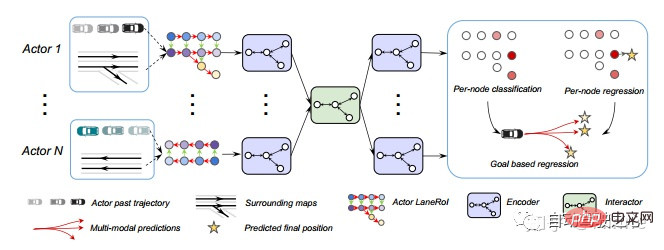
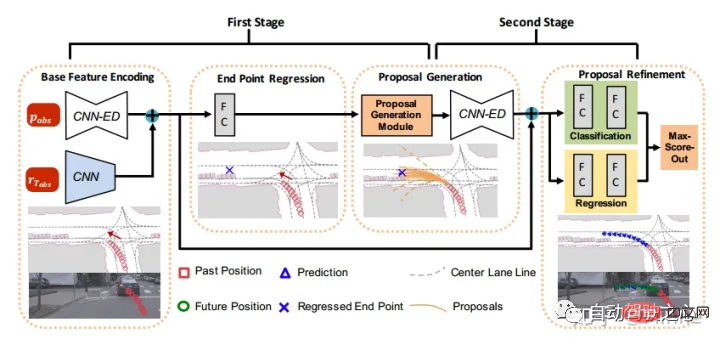
Uber#:LaneRCNN[5]。
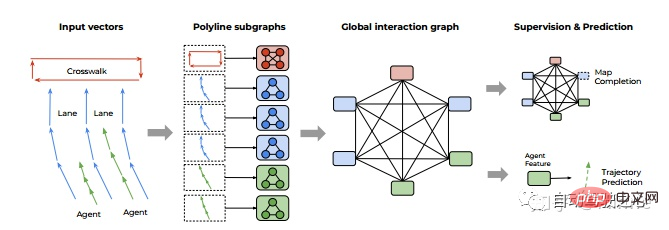
Google#:VectorNet[6]。
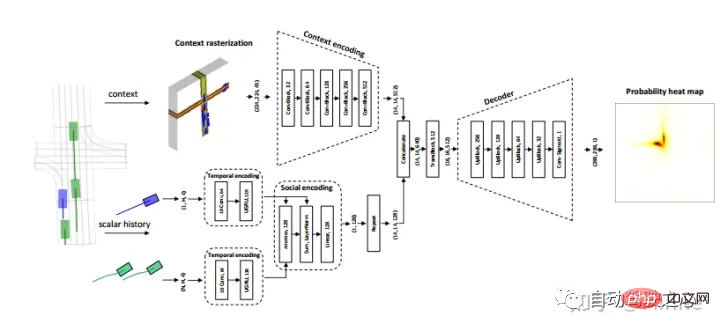
Huawei#:HOME[7]。
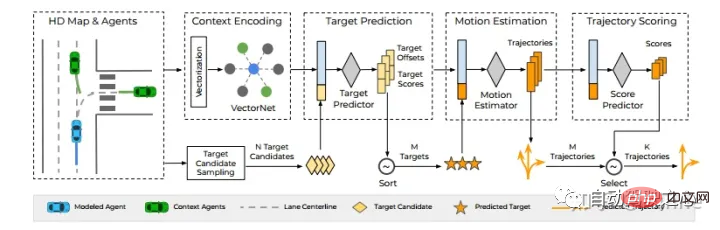
Waymo#:TNT[8]。
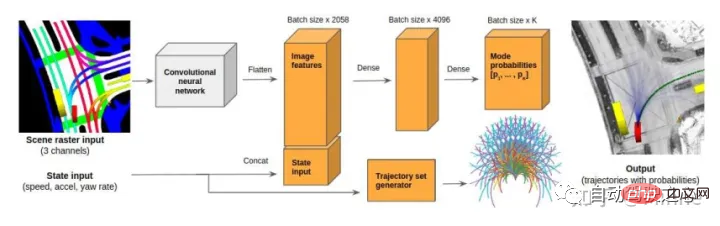
Aptive#:Covernet[9]。
NEC#:R2P2[10]。
商湯:TPNet[11]。
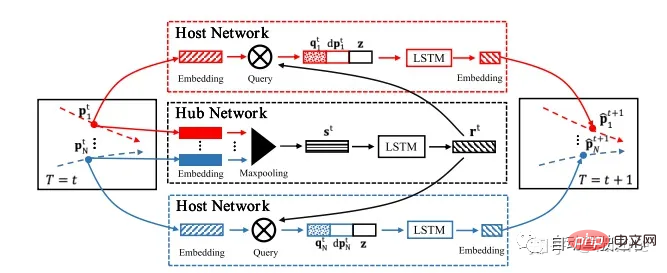
美團:StarNet[12]。行人。
Aibee#:Sophie[13]。行人。
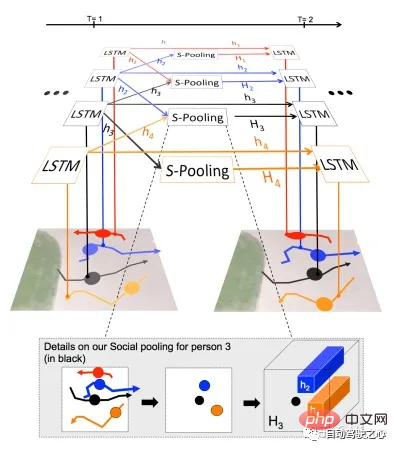
MIT#:Social lstm[14]。行人。
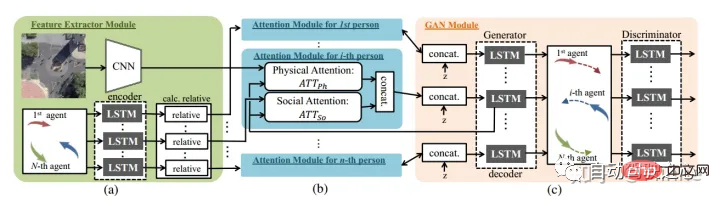
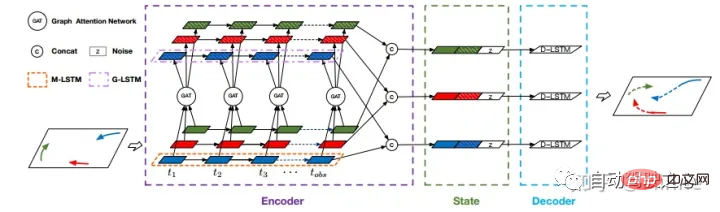
#中科大:STGAT[15]。行人。
#百度#:Lane-Attention[16]。
Apollo:可以看如下部落格作為參考。
https://www.cnblogs.com/liuzubing/p/11388485.html
Apollo的預測模組接收感知、定位以及地圖模組的輸入。
1.首先做了場景拆分,分為了普通巡航道路以及路口兩個場景。
2.而後對感知得到的目標做重要性劃分,分為可以忽略的目標(不會影響到自車)、需要謹慎處理的目標(可能影響到自車)以及普通目標(介於二者之間)。
3.而後進入Evaluator,本質上就是意圖預測。
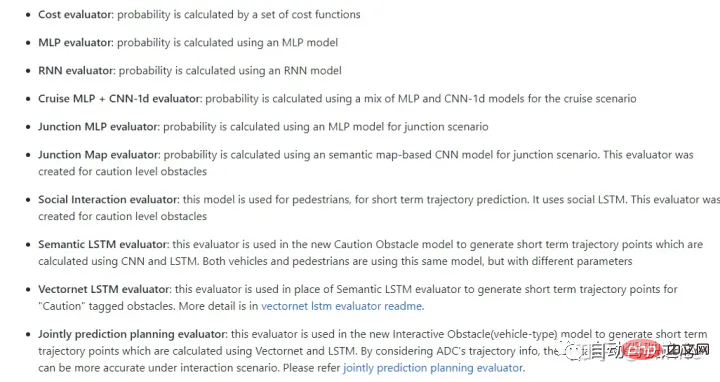
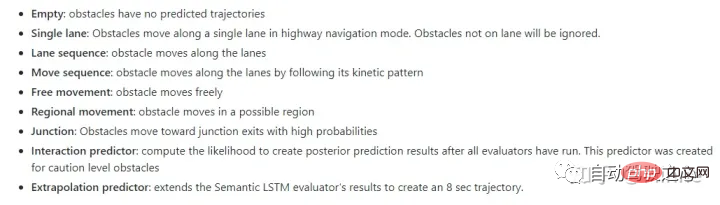
4.最後進入predictor,用於預測軌跡產生。對於靜止目標、沿道行駛、freeMove、路口等不同場景做不同的操作。
5 資料集
#(1) NGSIM
此資料集是美國FHWA蒐集的高速公路行車數據,包括了US101、I-80等道路上的所有車輛在一個時間段的車輛行駛狀況。數據是採用攝影機獲取,然後加工成一條一條的軌跡點記錄。其資料集為CSV檔。數據沒有太多雜訊。
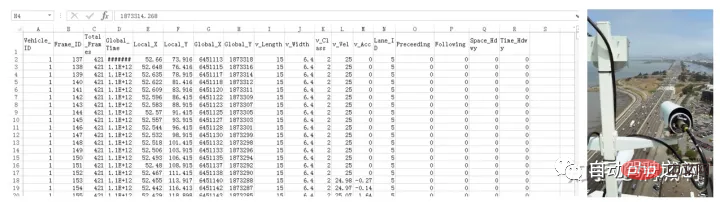
更多是整體調度層面的訊息,如道路規劃、車道設定、車流量調節等。車輛運動學狀態需要進一步抽取。處理程式碼可使用下面的github。
https://github.com/nachiket92/conv-social-pooling
(2) INTERACTION
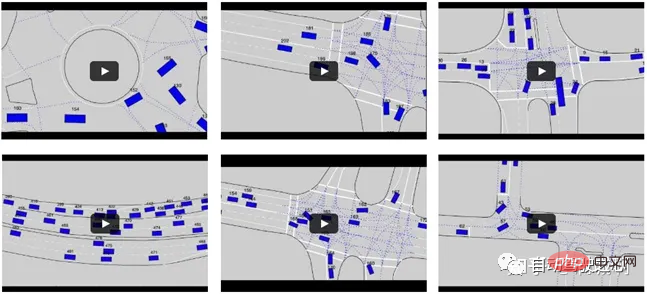
此資料集為加州大學柏克萊分校機械系統控制實驗室(MSC Lab)與來自卡爾斯魯厄理工學院(KIT)和國立巴黎高等礦業學院(MINES ParisTech)的合作者建立了一個國際性、對抗性、協作性的資料集(INTERACTION)。它能準確重現不同國家的各種駕駛場景中道路使用者(如車輛、行人)的大量互動性行為。
http://www.interaction-dataset.com/
# (3)apolloscape
此為Apollo的公開自動駕駛資料集,其中有為軌跡預測提供的資料。內部文件為2fps的1min資料序列,資料結構包括幀數ID、目標ID、目標類別、位置xyz,長寬高資訊以及heading,其中目標類別包括小車、大車、行人、自行車/電動車以及其他。
https://apolloscape.auto/trajectory.html
(4) TRAF
此資料集聚焦於高密度的交通狀況,此狀況可以幫助演算法更好地專注於不確定環境下人類駕駛員行為分析。數據每幀分別包含約13輛機動車輛,5名行人和2輛自行車
#https://gamma.umd.edu/researchdirections/autonomousdriving/ad
在連結中有很多使用此資料集的軌跡預測項目。
(5) nuScenes
#重磅來了,此資料集是2020年4月提出。其在波士頓和新加坡這兩個城市收集了1000個駕駛場景,這兩個城市交通繁忙且駕駛狀況極具挑戰性。其數據集具有相關論文,可以看看,更好地了解此數據集。
https://arxiv.org/abs/1903.11027
此資料集中有預測相關的比賽,可以關注。
https://www.nuscenes.org/prediction?externalData=all&mapData=all&modalities=Any
#6 評估指標
目前主要使用的評估指標為幾何測量。
幾何測量有許多指標,主要使用的是ADE、FDE、MR。
ADE為均一化歐式距離。 FDE為最終預測點之間的歐式距離。 MR為未中率。有很多不同的名字,主要就是設一個閾值,預測點跡之間歐式距離低於這個預測就記為命中,高於這個閾值就記為未命中,最後計算一個百分比。
幾何測量是衡量預測軌跡與實際軌跡相似性的重要指標,可以很好是代表精確度。但是以軌跡預測存在的意義來說,僅僅評估精確度是沒有意義的。也應有機率度量,用來評估不確定性,尤其是對於多模態輸出分佈;還有任務層面度量,魯棒性的度量以及效率的評估這些。
機率測量:可以使用KL散度、預測機率、累積機率來作為機率度量。如NLL, KDE-based NLL[17]。任務層度量:評估軌跡預測對後端規控的影響(piADE,piFDE)[18]。穩健性:要考慮在預測之前,觀測到的部分軌跡的長度或持續時間;訓練資料的size;輸入資料取樣頻率和感測器雜訊;神經網路泛化、過度擬合及輸入利用率分析;感知模組送入的輸入如果有問題是否保證功能正常等等方面的因素。效率:要考慮算力的。
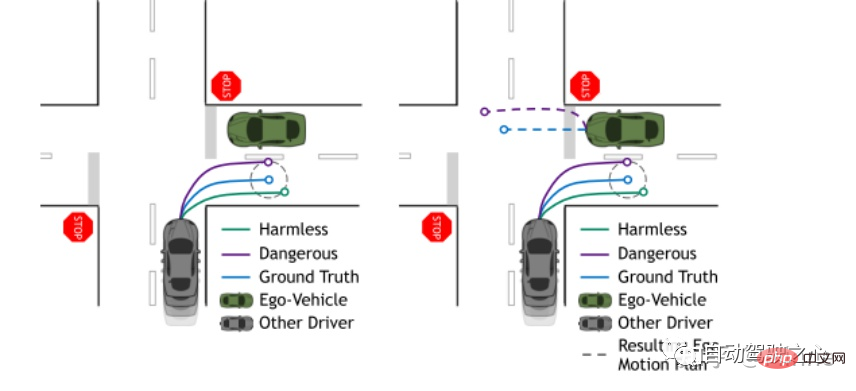
如下圖所示,此論文的主要考慮為基於真值(藍色),灰色的目標車預測的紫色與綠色軌跡如果使用幾何度量是具有相同的ADE與FDE的,但是不同的預測方式對自車的planning會造成影響,而現在沒有這種評估任務層級的度量,於是他們提出piADE與piFDE來做這件事。
7 三個問題
#問題1:三種不同的軌跡預測方法:基於實體模型、基於學習、基於規劃各自應用場景在什麼地方,有什麼優缺點呢?
不同的建模方法可以結合並利用不同類型的上下文資訊。利用目標的上下文線索、動靜態環境可以擴展出所有建模方法。然而,不同的建模方法在結合不同類別的語義資訊時表現出不同程度的複雜性和效率。
1.基於物理模型的方法
#適用場景:目標、靜態環境、動力學模擬可以被顯式轉移方程式建模。
優點:
- 基於物理模型的方法透過選擇適當的轉移方程,可以很容易地跨環境應用,而不需要訓練數據,儘管一些用於參數估計的數據是有用的。在論文中,簡單的CV模型也可產生合理的結果。
- 基於物理模型的方法很容易和target agent cues結合擴展。
缺點:
- #這種顯示建模的方法可能無法很好地捕捉現實世界的複雜性。
- 轉移方程式在空間與時間上缺乏全局訊息,導致可能獲得是局部最佳解。
這樣的缺點導致使用物理的方法限制在短期預測或obstacle-free的環境。
2.基於學習的方法
#適用場景:適合於當前環境具有複雜的未知資訊(例如具有豐富語意的公共區域),並且這些資訊可以用於比較大的預測範圍。
優點:
- 基於學習的方法可以潛在地處理所有類型的上下文信息,這些資訊編碼在收集的數據集。他們中一些是map-based,另外一些可以用來對上下文資訊進一步擴展。
缺點:
- #需要在特定地點收集足夠的數據,才能進行訓練。
- 上下文資訊擴充功能可能會導致involved learning、資料效率和泛化問題。
- 傾向於在非安全的關鍵元件中使用,在ADAS中比較在意可解釋性,這是基於學習方法無法做到的。
3.基於規劃的方法
#適用場景:在終點定下來了且環境地圖可獲得的場景,有很好的表現。
優點:
- 如果滿足以上兩個條件,其比物理方法可以獲得更好的精度,比基於學習的方法有更好的泛化能力。
缺點:
#- 傳統的規劃演算法:Dijkstra、Fast Marching Method、optimal sampling-based motion planners會隨著目標的數量、環境的大小、預測範圍的增加而指數增長。
- 與基於物理的簡單模型相比,基於上下文線索的規劃方法(如逆向規劃的獎勵函數和正向規劃的模型)的參數是瑣碎的,通常更容易學習,但在推理方面,對於高維度(目標)智能體狀態,效率較低。
基於規劃的方法本質上是map-aware 與 abstacle-aware,自然地使用語義線索進行擴展。通常情況下,他們會將情境複雜性編碼到目標/獎勵方程中,但這可能無法適當地整合動態線輸入。因此,作者必須設計具體的修改,將動態輸入納入預測演算法(Jump Markov Processes、local adaptations of the predicted trajectory、game-theoretic)。與基於學習的方法不同,目標輸入很容易合併,因為前向與逆向的規劃過程都基於同一個目標動態模型。
問題2:軌跡預測的問題現在已經解決了嗎?
軌跡預測的需求很大程度上取決於應用領域和其中的特定用例場景。短期內可能不能說軌跡預測這個問題已經解決了。以汽車產業舉例,因為有專門的標準規定,定義了最大速度、交通規則、行人速度和加速度的分佈,以及車輛舒適加速/減速率的規範,其在製定需求和提出的解決方案方面似乎是最成熟的。可以說對於智慧汽車的AEB功能,解決方案已經達到了允許工業化生產消費產品的性能水平,對於其所需用例已經解決。至於其他用例,則需要在不久的將來對需求進行更多的標準化和明確的表達。而對於魯棒性與穩定性還需要演進。
所以在回答軌跡預測是否已經解決這個問題之前,最起碼應該先定了標準。
目前對機器人領域來說
- #基於物理模型與學習的方法可以在短時間(1-2s)有較高的精度。非常適合人群的局部運動規劃與碰撞避免。最簡單的CV模型就對機器人的局部規劃有很好的效果。如果考慮行人之間的互動以及因為機器人的存在對行人運動的影響,有許多先進演算法。
- 對於需要預測15-20s的去全域路徑規劃,有很大挑戰。需求可以適當放鬆,而理解動靜態上下文輸入(長期來看影響運行、在環境地圖上的推理、目標的意圖推斷)則變得十分重要。對於局部和全域路徑規劃,位置無關方法最適合在各種環境下預測運動。
- 目前機器人預測4.8s的ADE為0.19-0.4m的。簡單的速度模型也可以達到0.53m的ADE。 9s預測有1.4-2m的ADE。
目前對於自動駕駛領域:
- #大多數工作考慮的都是橫過馬路的行人:開始走繼續走停止走。
- 自行車:一個騎自行車的人在接近一個十字路口時,後面有多達五個不同的道路方向。
問題3:目前衡量軌跡預測效能的評估技術是否夠好?
目前對於預測演算法缺乏系統性的方法,特別是對於考慮上下文輸入以及預測任意數量的目標的軌跡預測方法。
現在大多數作者只使用幾何度量(AED, FDE)作為衡量演算法好壞的指標。然而對於長時間預測,預測通常是多模態的,並且與不確定性有關,對此種方法的性能評估應該使用考慮到這一點的指標,例如從KLD得到的負對數似然或對數損失。
此外也需要機率度量,可以更好地反映了人體運動的隨機性以及感知缺陷所涉及的不確定性。
還有穩健性的評估,需要考慮在感知端出現偵測錯誤,追蹤缺陷,自我定位不確定性或地圖變化此類場景時系統的穩定性。
同時目前所使用資料集,雖然包含的場景十分的全面,但是這些資料集通常是半自動註解的,因此只能提供不完整和有雜訊真值估計。此外,在一些需要長期預測的應用領域中,軌跡長度往往不足。最後,資料集中的目標之間的交互作用通常是有限的,例如在稀疏的環境裡面,目標之間很難有影響。
綜上:為了評估預測質量,研究者應該選擇更複雜的資料集(包括非凸的障礙、長軌跡和複雜的interaction)以及完整的度量指標(幾何機率)。比較好的方法是根據不同的預測時間、不同的觀測週期,不同的場景複雜度設定不同的精確度要求。並且應該有魯棒性評估以及即時性評估。此外應該有相關的指標可以衡量ADAS系統對後端影響程度的指標[18]以及衡量對危險場景敏感性的指標[1]。
8 未來方向
來自於[2]中的討論,此處為引用。
當前的趨勢時用更複雜的方法去超越使用單一模型KF的方法
##方向:
- 使用強化的上下文資訊:可以使用更深層的語意訊息,這種語意訊息對靜態環境有較好的理解。且目前使用語意特徵進行軌跡預測仍有待開發
- 關於有social-aware的場景:①目前大多數方法假設所有被觀察到的人的行為都是相似的,他們的運動可以由相同的模型和相同的特徵來預測,而對高層次社會屬性的捕捉和推理還處於發展的早期階段。 ②大多數可行的方法基於的假設是人們之間的合作行為,而真實的人可能更傾向於優化個人目標,而不是聯合策略,因此結合傳統AI 博弈論的方法很有研究前途。
- 對於長期預測,情境資訊變得特別重要,因為要基於情境和周圍環境考慮意圖。目前許多基於學習的方法將個體視為粒子,用來學習轉移訊息,以決定未來運動的方向。而透過更多的透過意圖驅動的預測來擴展這些模型,類似於人類目標導向的行為,將有利於長期預測。
- 大多數基於規劃的方法依賴一組給定的目標,這使得它們在沒有事先知道目的地或可能目的地數量過高的情況下無法使用或不精確。這使得基於語義資訊對目的終點進行自動推斷變得重要。或者可以動態辨識環境裡面的可能目的地,並基於此進行軌跡預測。這樣就可以在未知的環境裡面使用基於規劃的方法了。
- 現在的方法都是集中在解決某一類特定的任務,例如當環境中存在明顯的運動模式時,或是當環境的空間結構和目標agent的目的地預先已知時。而軌跡預測方法需要能適應未定義的/不斷變化的環境,並且可以處理突發情況。這就需要遷移學習以及一些應對新環境的方法,這種情況下,學習和推理基本的不變的規則,或者通用的行人行為或碰撞避免是不合適的。領域自適應是可以用來學習泛化模型。
- 另外要注意的方向:穩健性與可整合性。
綜上:簡潔來說就是上下文資訊用的要更深入、最好對不同目標有不同行為模型、博弈論、基於更多資訊做更魯棒的意圖預測、對終點的自動推論、對新環境的泛化問題、魯棒性與可整合性。
以上是探討自動駕駛軌跡預測技術的現況及發展趨勢的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 CUDA之通用矩陣乘法:從入門到熟練!
Mar 25, 2024 pm 12:30 PM
CUDA之通用矩陣乘法:從入門到熟練!
Mar 25, 2024 pm 12:30 PM
通用矩陣乘法(GeneralMatrixMultiplication,GEMM)是許多應用程式和演算法中至關重要的一部分,也是評估電腦硬體效能的重要指標之一。透過深入研究和優化GEMM的實現,可以幫助我們更好地理解高效能運算以及軟硬體系統之間的關係。在電腦科學中,對GEMM進行有效的最佳化可以提高運算速度並節省資源,這對於提高電腦系統的整體效能至關重要。深入了解GEMM的工作原理和最佳化方法,有助於我們更好地利用現代計算硬體的潛力,並為各種複雜計算任務提供更有效率的解決方案。透過對GEMM性能的優
 华为乾崑 ADS3.0 智驾系统 8 月上市 享界 S9 首发搭载
Jul 30, 2024 pm 02:17 PM
华为乾崑 ADS3.0 智驾系统 8 月上市 享界 S9 首发搭载
Jul 30, 2024 pm 02:17 PM
7月29日,在AITO问界第四十万台新车下线仪式上,华为常务董事、终端BG董事长、智能汽车解决方案BU董事长余承东出席发表演讲并宣布,问界系列车型将于今年8月迎来华为乾崑ADS3.0版本的上市,并计划在8月至9月间陆续推送升级。8月6日即将发布的享界S9将首发华为ADS3.0智能驾驶系统。华为乾崑ADS3.0版本在激光雷达的辅助下,将大幅提升智驾能力,具备融合端到端的能力,并采用GOD(通用障碍物识别)/PDP(预测决策规控)全新端到端架构,提供车位到车位智驾领航NCA功能,并升级CAS3.0全
 自動駕駛場景中的長尾問題怎麼解決?
Jun 02, 2024 pm 02:44 PM
自動駕駛場景中的長尾問題怎麼解決?
Jun 02, 2024 pm 02:44 PM
昨天面試被問到了是否做過長尾相關的問題,所以就想著簡單總結一下。自動駕駛長尾問題是指自動駕駛汽車中的邊緣情況,即發生機率較低的可能場景。感知的長尾問題是目前限制單車智慧自動駕駛車輛運行設計域的主要原因之一。自動駕駛的底層架構和大部分技術問題已經解決,剩下的5%的長尾問題,逐漸成了限制自動駕駛發展的關鍵。這些問題包括各種零碎的場景、極端的情況和無法預測的人類行為。自動駕駛中的邊緣場景"長尾"是指自動駕駛汽車(AV)中的邊緣情況,邊緣情況是發生機率較低的可能場景。這些罕見的事件
 SIMPL:用於自動駕駛的簡單高效的多智能體運動預測基準
Feb 20, 2024 am 11:48 AM
SIMPL:用於自動駕駛的簡單高效的多智能體運動預測基準
Feb 20, 2024 am 11:48 AM
原文標題:SIMPL:ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving論文連結:https://arxiv.org/pdf/2402.02519.pdf程式碼連結:https://github.com/HKUST-Aerial-Robotics/SIMPLobotics單位論文想法:本文提出了一種用於自動駕駛車輛的簡單且有效率的運動預測基線(SIMPL)。與傳統的以代理為中心(agent-cent
 FisheyeDetNet:首個以魚眼相機為基礎的目標偵測演算法
Apr 26, 2024 am 11:37 AM
FisheyeDetNet:首個以魚眼相機為基礎的目標偵測演算法
Apr 26, 2024 am 11:37 AM
目標偵測在自動駕駛系統當中是一個比較成熟的問題,其中行人偵測是最早得以部署演算法之一。在多數論文當中已經進行了非常全面的研究。然而,利用魚眼相機進行環視的距離感知相對來說研究較少。由於徑向畸變大,標準的邊界框表示在魚眼相機當中很難實施。為了緩解上述描述,我們探索了擴展邊界框、橢圓、通用多邊形設計為極座標/角度表示,並定義一個實例分割mIOU度量來分析這些表示。所提出的具有多邊形形狀的模型fisheyeDetNet優於其他模型,並同時在用於自動駕駛的Valeo魚眼相機資料集上實現了49.5%的mAP
 自動駕駛與軌跡預測看這篇就夠了!
Feb 28, 2024 pm 07:20 PM
自動駕駛與軌跡預測看這篇就夠了!
Feb 28, 2024 pm 07:20 PM
軌跡預測在自動駕駛中承擔著重要的角色,自動駕駛軌跡預測是指透過分析車輛行駛過程中的各種數據,預測車輛未來的行駛軌跡。作為自動駕駛的核心模組,軌跡預測的品質對於下游的規劃控制至關重要。軌跡預測任務技術堆疊豐富,需熟悉自動駕駛動/靜態感知、高精地圖、車道線、神經網路架構(CNN&GNN&Transformer)技能等,入門難度很高!許多粉絲期望能夠盡快上手軌跡預測,少踩坑,今天就為大家盤點下軌跡預測常見的一些問題和入門學習方法!入門相關知識1.預習的論文有沒有切入順序? A:先看survey,p
 聊聊端到端與下一代自動駕駛系統,以及端到端自動駕駛的一些迷思?
Apr 15, 2024 pm 04:13 PM
聊聊端到端與下一代自動駕駛系統,以及端到端自動駕駛的一些迷思?
Apr 15, 2024 pm 04:13 PM
最近一個月由於眾所周知的一些原因,非常密集地和業界的各種老師同學進行了交流。交流中必不可免的一個話題自然是端到端與火辣的特斯拉FSDV12。想藉此機會,整理當下這個時刻的一些想法和觀點,供大家參考和討論。如何定義端到端的自動駕駛系統,應該期望端到端解決什麼問題?依照最傳統的定義,端到端的系統指的是一套系統,輸入感測器的原始訊息,直接輸出任務關心的變數。例如,在影像辨識中,CNN相對於傳統的特徵提取器+分類器的方法就可以稱之為端到端。在自動駕駛任務中,輸入各種感測器的資料(相機/LiDAR
 蘋果16系統哪個版本最好
Mar 08, 2024 pm 05:16 PM
蘋果16系統哪個版本最好
Mar 08, 2024 pm 05:16 PM
蘋果16系統中版本最好的是iOS16.1.4,iOS16系統的最佳版本可能因人而異添加和日常使用體驗的提升也受到了很多用戶的好評。蘋果16系統哪個版本最好答:iOS16.1.4iOS16系統的最佳版本可能因人而異。根據公開的消息,2022年推出的iOS16被認為是一個非常穩定且性能優越的版本,用戶對其整體體驗也相當滿意。此外,iOS16中新功能的新增和日常使用體驗的提升也受到了許多用戶的好評。特別是在更新後的電池續航力、訊號表現和發熱控制方面,使用者的回饋都比較正面。然而,考慮到iPhone14
