

重要的製造業趨勢:智慧機器人需要具備四種能力

智慧機器人是智慧產品的典型代表。智慧機器人至少要具備以下三個要素:一是感知要素,用來認識周圍環境狀態;二是運動要素,對外界做出反應性動作;三是思考要素,根據感知要素所得到的訊息,思考採用什麼樣的動作。
人們通常把機器人分成三代。第一代是可程式機器人,一般可以根據操作人員所編的程序,完成一些簡單的重複性操作。這一代機器人是從1960年代後半葉開始投入使用的,目前在工業界已被廣泛應用。
第二代是感知機器人,又叫作自適應機器人,它是在第一代機器人的基礎上發展起來的,具有不同程度的感知周圍環境的能力。
第三代機器人具有識別、推理、規劃和學習等智慧機制,它可以把感知和行動智慧化地結合起來,因此能在非特定的環境下作業,被稱為智慧機器人。
智慧機器人與工業機器人的根本差異在於,智慧機器人具有感知、辨識、判斷及規劃功能,因此機器的智慧又可分為兩個層次,一是具有感知、辨識、理解與判斷功能,二是具有總結經驗和學習的功能。
智慧機器人由於用途不同,系統結構和功能也千差萬別,這裡僅就工業應用的機器人的基本結構和智能特徵做介紹。圖2.3是智慧機器人的基本組成。
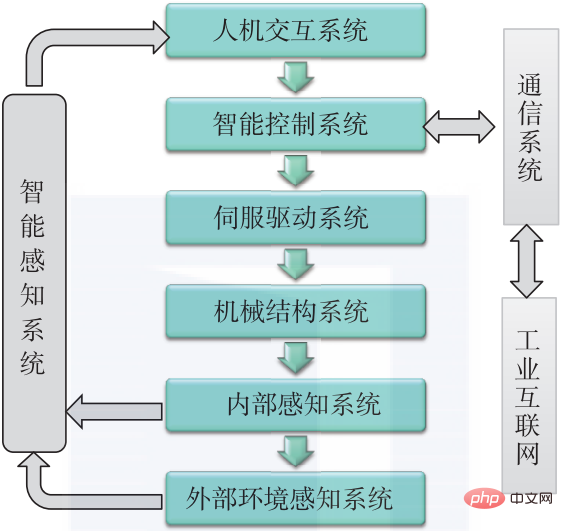
▲圖2.3 智慧機器人的基本組成
1.環境感知能力
智慧機器人最顯著的智慧特徵是對外和對內的感知能力。
外部環境感知能力由外部感知系統實現,該系統由一系列外部感測器(包括視覺、聽覺、觸覺、接近覺、力覺和紅外線、超音波及雷射等)進行感測訊息處理、實現控制與操作。這些感測器包括碰撞感測器、遠紅外線感測器、光敏感測器、麥克風、光電編碼器、熱釋電感測器、超音波感測器、連續測距紅外線感測器、數位指南針、溫度感測器等。
內部感知系統由一系列用來偵測機器人本身狀態的感測器構成,可即時監控機器人各運動部件的各個座標的位置、速度、加速度、壓力和軌跡等,並監控各個部件的受力、平衡、溫度等。
由外在環境感知系統和內部感知系統所獲得的資訊組成智慧感知系統。該系統中使用的感測器種類和數量越來越多,每種感測器都有一定的使用條件和感知範圍,並且又能給出環境或物件的部分或整個側面的信息,為了有效地利用這些感測器信息,需要採用某種形式對感測器資訊進行綜合或融合處理,不同類型資訊的多種形式的處理系統就是感測器融合。
感測器的整合技術涉及神經網路、知識工程、模糊理論等在資訊、偵測和控制領域的新理論和新方法。
2.控制能力
智慧機器人的系統控制能力由智慧控制系統實現,該系統的任務是根據機器人的作業指令程序以及從內部和外部感測器反饋回來的訊號,經過知識庫和專家系統辨識並應用不同的演算法分析和決策,進而發出控制指令,支配機器人完成規定的運動和功能。
若機器人不具備資訊回饋特徵,則該機器人的控制系統為開環控制系統,反之則為閉迴路控制系統。根據控制原理,控制系統可分為程式控制系統、適應性控制系統和人工智慧控制系統,而根據控制運動的形式,控制系統可分為點位控制系統和連續軌跡控制系統。
如何分析處理這些資訊並做出正確的控制決策,需要專家系統的支援。專家系統解釋從感測器收集到的數據,推導出機器人狀態描述,從給定的狀態推導並預測可能出現的結果,透過運行狀態的評價,診斷出系統可能出現的故障。
依照系統設計的目標與限制條件,規劃設計出一系列的行動,監控所得的結果與計畫的差異,提出維護系統正確運作的方法。人工智慧系統與傳統控制方法結合,形成整個閉環控製過程,這需要大量的知識、規則、演算法、模式識別等技術的支援。
3.學習能力
隨著對智慧機器人的要求不斷提高,機器人所面臨的環境通常無法預知,非結構化環境成為主流。在動態多變的複雜環境中,機器人如果要完成複雜的任務,其學習能力就顯得極為重要了。
在這種情況下,機器人應根據所面臨的外部環境和任務透過學習不斷地調節自身,在與環境互動的過程中抽取有用的信息,使之逐漸認識和適應環境。透過學習可以不斷提高機器人的智慧水平,使其能夠應對一些意想不到的情況,從而彌補設計人員在設計過程中造成的可能存在的不足。
因此,學習能力是機器人應該具備的重要能力之一,它為處於複雜多變環境下的機器人在環境理解規劃與決策等方面提供了有效保障,從而改善整個機器人系統的運行效率。
4.連接工業互聯網的能力
智慧機器人和所有智慧產品一樣,未來都要成為工業互聯網的一個終端,因此智慧機器人要具備連接工業互聯網的能力。
以資訊物理融合系統(CPS)的原理建構通訊模組,對內與智慧控制系統集成,採集機器人的所有運作狀態;對外透過標準現場匯流排和乙太網路卡接取互聯網,實現機器人之間,機器人與物流系統之間、其他應用系統之間的集成,實現物理世界與資訊世界之間的整合。
智慧物聯繫統打破傳統實體世界和資訊系統的界限,將資料變成及時且有用的信息,讓使用者充分享用虛擬和現實世界的各種資源。
本文摘編自《智慧製造:AI落地製造業之道》(ISBN:978-7-111-69931-6),經出版方授權發布。
以上是重要的製造業趨勢:智慧機器人需要具備四種能力的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 WorldCoin(WLD)價格預測2025-2031:到2031年WLD會達到4美元嗎?
Apr 21, 2025 pm 02:42 PM
WorldCoin(WLD)價格預測2025-2031:到2031年WLD會達到4美元嗎?
Apr 21, 2025 pm 02:42 PM
WorldCoin(WLD)凭借其独特的生物识别验证和隐私保护机制,在加密货币市场中脱颖而出,吸引了众多投资者的目光。WLD凭借其创新技术,特别是结合OpenAI人工智能技术,在众多山寨币中表现突出。但未来几年,数字资产的走势如何呢?让我们一起预测WLD的未来价格。2025年WLD价格预测预计2025年WLD将实现显著增长。市场分析显示,WLD平均价格可能达到1.31美元,最高可能触及1.36美元。然而,在熊市情况下,价格可能跌至0.55美元左右。这一增长预期主要源于WorldCoin2.
 比特幣成品結構分析圖是啥?怎麼畫?
Apr 21, 2025 pm 07:42 PM
比特幣成品結構分析圖是啥?怎麼畫?
Apr 21, 2025 pm 07:42 PM
繪製比特幣結構分析圖的步驟包括:1. 確定繪圖目的與受眾,2. 選擇合適的工具,3. 設計框架並填充核心組件,4. 參考現有模板。完整的步驟確保圖表準確且易於理解。
 跨鏈交易什麼意思?跨鏈交易所有哪些?
Apr 21, 2025 pm 11:39 PM
跨鏈交易什麼意思?跨鏈交易所有哪些?
Apr 21, 2025 pm 11:39 PM
支持跨鏈交易的交易所有:1. Binance,2. Uniswap,3. SushiSwap,4. Curve Finance,5. Thorchain,6. 1inch Exchange,7. DLN Trade,這些平台通過各種技術支持多鏈資產交易。
 Aavenomics是修改AAVE協議令牌並介紹令牌回購的建議,已達到法定人數
Apr 21, 2025 pm 06:24 PM
Aavenomics是修改AAVE協議令牌並介紹令牌回購的建議,已達到法定人數
Apr 21, 2025 pm 06:24 PM
Aavenomics是修改AAVE協議令牌並引入令牌回購的提議,已為AAVEDAO實現了一個法定人數。 AAVE連鎖計劃(ACI)創始人馬克·澤勒(MarcZeller)在X上宣布了這一點,並指出它標誌著該協議的新時代。 AAVE連鎖倡議(ACI)創始人MarcZeller在X上宣布,Aavenomics提案包括修改AAVE協議令牌和引入令牌回購,已為AAVEDAO實現了法定人數。根據Zeller的說法,這標誌著該協議的新時代。 AaveDao成員以壓倒性的投票支持該提議,即在周三以每週100
 幣圈行情實時數據免費平台推薦前十名發布
Apr 22, 2025 am 08:12 AM
幣圈行情實時數據免費平台推薦前十名發布
Apr 22, 2025 am 08:12 AM
適合新手的加密貨幣數據平台有CoinMarketCap和非小號。 1. CoinMarketCap提供全球加密貨幣實時價格、市值、交易量排名,適合新手與基礎分析需求。 2. 非小號提供中文友好界面,適合中文用戶快速篩選低風險潛力項目。
 如何在幣安拿下 KERNEL 空投獎勵 全流程攻略
Apr 21, 2025 pm 01:03 PM
如何在幣安拿下 KERNEL 空投獎勵 全流程攻略
Apr 21, 2025 pm 01:03 PM
在加密貨幣的繁華世界裡,新機遇總是不斷湧現。當下,KernelDAO (KERNEL) 空投活動正備受矚目,吸引著眾多投資者的目光。那麼,這個項目究竟是什麼來頭? BNB Holder 又能從中獲得怎樣的好處?別急,下面將為你一一揭曉。
 Rexas Finance(RXS)可以在2025年超過Solana(Sol),Cardano(ADA),XRP和Dogecoin(Doge)
Apr 21, 2025 pm 02:30 PM
Rexas Finance(RXS)可以在2025年超過Solana(Sol),Cardano(ADA),XRP和Dogecoin(Doge)
Apr 21, 2025 pm 02:30 PM
在波動劇烈的加密貨幣市場中,投資者正尋求超越熱門幣種的替代方案。 Solana(SOL)、Cardano(ADA)、XRP和Dogecoin(DOGE)等知名加密貨幣,儘管佔據著一定的市場地位,但也面臨著市場情緒、監管不確定性和可擴展性等挑戰。然而,一個新興項目RexasFinance(RXS)正在嶄露頭角。它並非依靠名人效應或炒作,而是專注於將現實世界資產(RWA)與區塊鏈技術結合,為投資者提供一種創新的投資方式。這一策略使其有望成為2025年最成功的項目之一。 RexasFi
 幣圈槓桿交易所排名 幣圈十大槓桿交易所APP最新推薦
Apr 21, 2025 pm 11:24 PM
幣圈槓桿交易所排名 幣圈十大槓桿交易所APP最新推薦
Apr 21, 2025 pm 11:24 PM
2025年在槓桿交易、安全性和用戶體驗方面表現突出的平台有:1. OKX,適合高頻交易者,提供最高100倍槓桿;2. Binance,適用於全球多幣種交易者,提供125倍高槓桿;3. Gate.io,適合衍生品專業玩家,提供100倍槓桿;4. Bitget,適用於新手及社交化交易者,提供最高100倍槓桿;5. Kraken,適合穩健型投資者,提供5倍槓桿;6. Bybit,適用於山寨幣探索者,提供20倍槓桿;7. KuCoin,適合低成本交易者,提供10倍槓桿;8. Bitfinex,適合資深玩
