

一文聊聊ADAS系統感測器應該如何佈置

本文首先介紹感測器佈置策略在進階駕駛輔助系統中的重要性,提出高階駕駛輔助系統感測器種類,包含前視智慧攝影機、前向和側向毫米波雷達(77 GHz/22 GHz )、超音波雷達以及環視攝影機,簡要闡述各感測器性能特點。然後,以目前某量產供應商方案為例,詳細介紹不同感測器性能參數,包括探測距離、探測範圍和對外部佈置環境的要求。介紹不同感測器獨自搭載車輛上可實現的功能和對不同駕駛輔助等級、不同功能組合下的不同感測器的融合策略。最後,介紹如何將不同感測器合理安裝到車輛上,根據需要達到的性能要求和探測範圍冗餘性,提出具體實施方案,並對其佈置要求進行細化解析說明。
#縮寫
#縮寫
#隨著科技的進步、自動駕駛技術的快速發展,目前越來越多汽車配備了高級駕駛輔助系統或輔助駕駛系統,自動駕駛汽車在SAE J3016TM自動駕駛等級中被歸類為五級自動駕駛。自動駕駛運用了多種感測器(超音波雷達、毫米波雷達、智慧攝影機、高清/標清攝影機、雷射雷達等),王田等對自動駕駛感知系統中的攝影機、雷射雷達、毫米波雷達等主要感測器進行了功能介紹。袁秀珍圍繞著自動駕駛汽車感測器技術產業進行分析,闡述了重要組成的硬體應用,如雷射雷達、攝影機、超音波感測等。在實現自動駕駛的開發價值鏈中,感測器的零件開發主要集中在國內外汽車零件供應商,而整車功能整合則在由主機廠完成。
張燕詠等提出一種基於多模態融合的自動駕駛感知融合演算法,許多工程師往往將開發精力集中在演算法開發與系統設計,但是經常出現的情況是,成功運用的感測器硬體和軟體策略,在部分主機廠車型上效果很好,但是在另外部分主機廠的運用上效果一般,甚至達到反面效果。這是因為在自動駕駛研發中,每個環節的考量都必不可少。作為閉環開發,好的演算法是基於感測器前端感知的精準探測,各類不同的硬體感測器,對於感測器探測性能提出了不同程度的要求,而對於探測性能影響尤為重要的一點就是感測器的佈置位置和佈置方式。本文依據自動駕駛中運用較多的感測器的探測性能特點,對佈置方式做一個簡單介紹。
高級駕駛輔助系統感測器介紹
高級駕駛輔助系統(Advanced Driving Assistance System,ADAS)是利用感測器,在汽車行駛過程中即時感應周圍的環境,收集數據,感知融合並對感知數據進行決策分析,最後對車輛進行控制和對駕駛員進行預警。攝影機能獲取包括物體顏色、外形、材質等豐富的環境信息,並且2D計算機視覺已取得很多進展,該領域有許多先進的算法用於信號燈檢測、物體分類等。毫米波雷達能夠獲取精準的距離資訊,穿透能力強,能夠抵抗天氣和環境變化的影響,可實現遠距離感知探測。
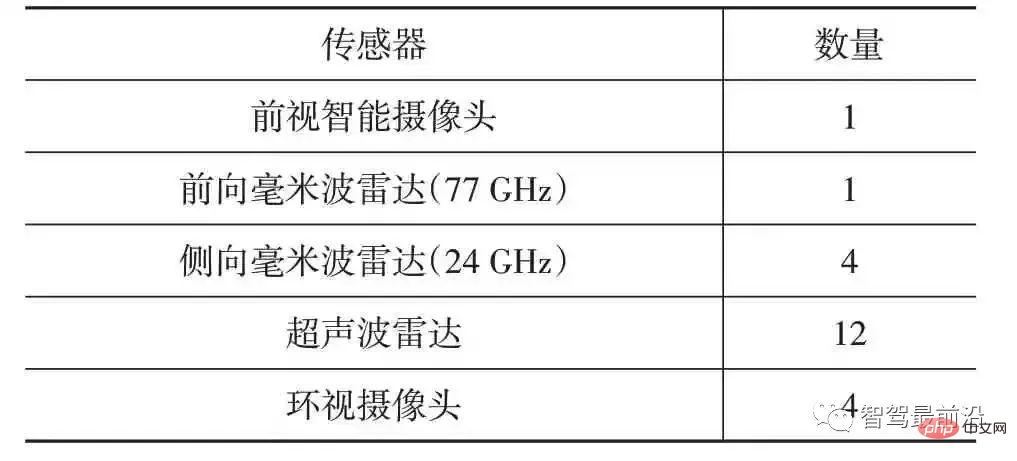
目前量產的自動駕駛汽車上的感測器種類有4種,數量為22個(表1)。 前視智慧攝影機:常用有單、雙和三目,主要應用於中遠距離場景,能辨識出清晰的車道線、交通識別、障礙物和行人,但對光照、天氣等條件很敏感,而且需要複雜的演算法支持,對處理器的要求也比較高。
#####################表1 進階駕駛輔助系統感測器分類##########毫米波雷達:主要有用於中短測距的24 GHz雷達和長測距的77 GHz雷達2種。毫米波雷達可有效提取景深及速度信息,識別障礙物,有一定的穿透霧、煙和灰塵的能力,但在環境障礙物複雜的情況下,由於毫米波依靠聲波定位,聲波出現漫反射,導致漏檢率和誤差率比較高。
超音波雷達:主要應用於短距離場景下,發送超音波與接收反射超音波訊號,並將偵測結果傳送給控制器。超音波的能量消耗較慢,穿透性強,測距的方法簡單,成本低。但它在速度很高情況下測量距離有一定的局限性,當汽車高速行駛時,使用超音波測距無法跟上汽車的車距即時變化,誤差較大。超音波散射角大,方向性較差,在測量較遠距離的目標時,其回波訊號會比較的弱,影響測量精度。但是,在短距離測量中,超音波測距感測器具有非常大的優勢。
環視攝影機:主要應用於短距離場景,可辨識障礙物,但對光照、天氣等外在條件很敏感,技術成熟,價格低廉。隨著技術的不斷發展進步,相機的像素也逐步提升,從最開始的30萬像素,提升到目前的100萬像素,未來3年內200萬像素的相機將會普及。
感測器實現功能配置組合
高階駕駛輔助系統的不同感測器之間的組合,可以實現不同的功能,上述介紹的22個感測器全部搭載到整車,可實現ADASL1/L2/L3,以下介紹詳細的子功能。
前向智慧攝影機和前向毫米波雷達
前向智慧攝影機實現AEB-C(自動緊急煞車)、LDW(車道偏離預警)、LKA(車道維持輔助)、TSR(交通標誌識別),實現L1級駕駛輔助。道路實際狀況偵測精準(如車道線、隧道、匝道、限速等),但距離偵測不精準。其代表性能參數如表2。
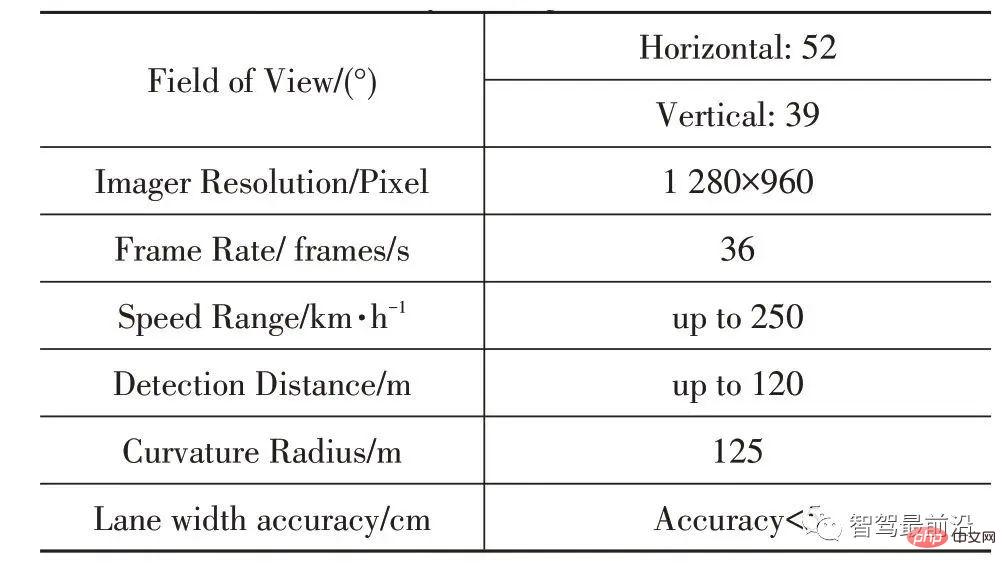
表2 Mobileye EYEQ3部分效能參數
前向毫米波雷達(77 GHz)實現ACC(自適應巡航)、AEB-C(自動緊急煞車-車)、FCW(前向碰撞預警),實現L1級駕駛輔助。距離探測精準,但無法預測實際狀況(如車道線、隧道、匝道、限速等)。其代表性能參數如表3。
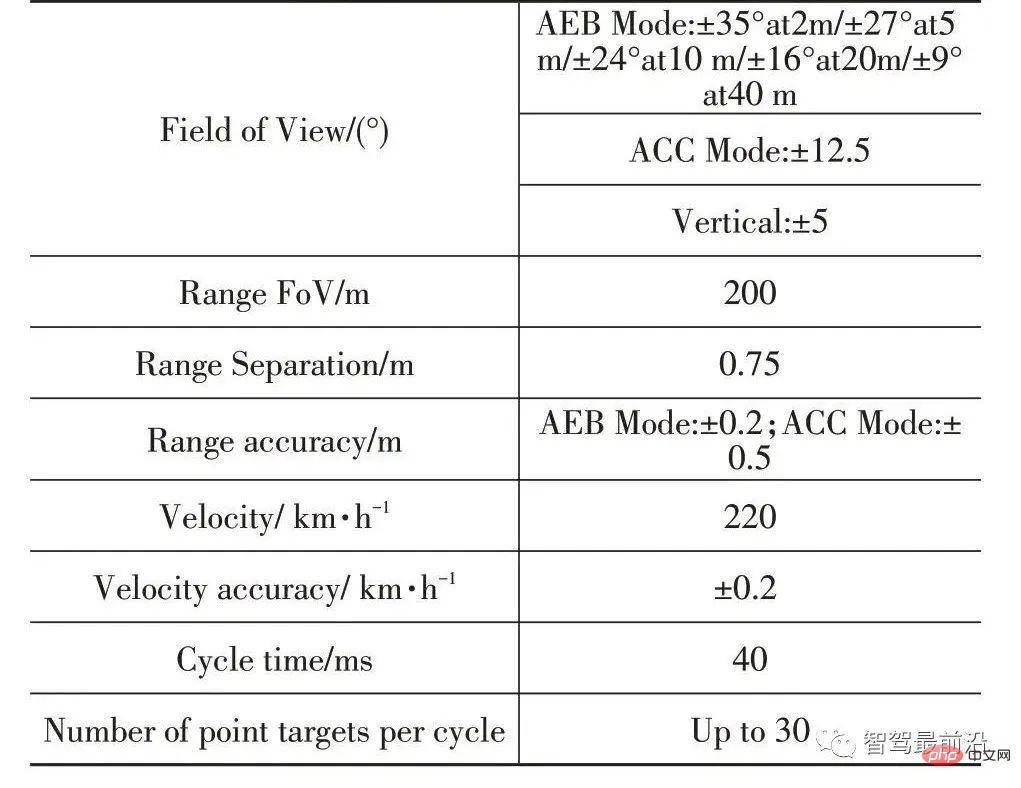
表3 AC1000部分效能參數
#前向智慧攝影機和前向毫米波雷達融合,實現ACC、AEB-C/P自動緊急煞車-車/人)、LDW、LKA、TSR、TJA(交通擁塞輔助)、ICA(智慧巡航輔助),可實現L2級駕駛輔助(圖1)。距離和道路資訊都是融合後的數據,探測精準。單雷達、單攝影機以及融合方案的比較如表4。
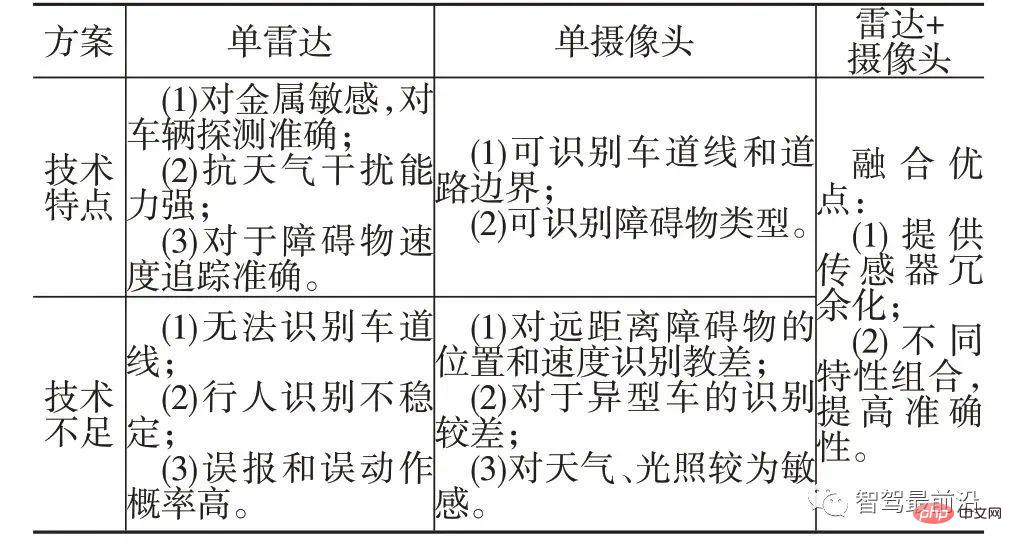
表4 單一雷達、單一攝影機以及融合方案的對比
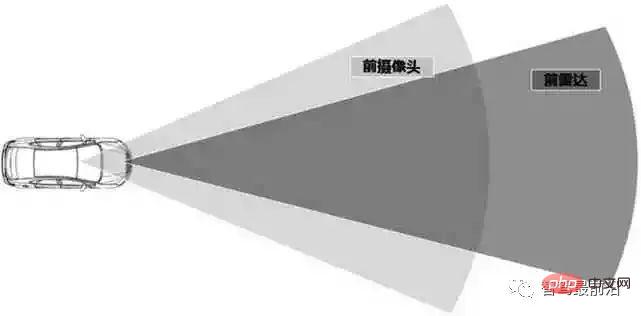
##圖1 前向智慧攝影機與前向毫米波雷達融合
側向毫米波雷達(角雷達)
側向毫米波雷達(24 GHz)實現盲點監測功能,有2種實現方式。後側方面2個毫米波雷達,實現BSD(盲點監測)、LCW(變換車道碰撞預警)、RCTA(後方交通穿行預警)及DOW(開門預警)功能;後側2個毫米波雷達前側2個毫米波雷達,除了實現以上功能外,還能實現FCTA(前方交叉路口預警),支援L2級以上的進階駕駛輔助功能。隨著科技進步,側向毫米波雷達性能也逐步提升,見表5。

表5 側向毫米波雷達部分參數與發展
側向毫米波雷達(4個)、前向毫米波雷達(1個)、前向智慧攝影機(1個)組合使用,可實現L2 (或L3-)級自動駕駛。在L2級自動駕駛上,增加TJA/HWAML(高速公路駕駛輔助—多車道)、ALC(主動變換車道輔助)、TLC(觸發式變換車道輔助)、ELK(緊急車道維持)、ESA(緊急轉向輔助)、JA(十字路口輔助)、全方位預警(含BSD/DOW/RCTA/FCTA/LCW)(圖2)。可高速公路工況下,實現自動駕駛功能。
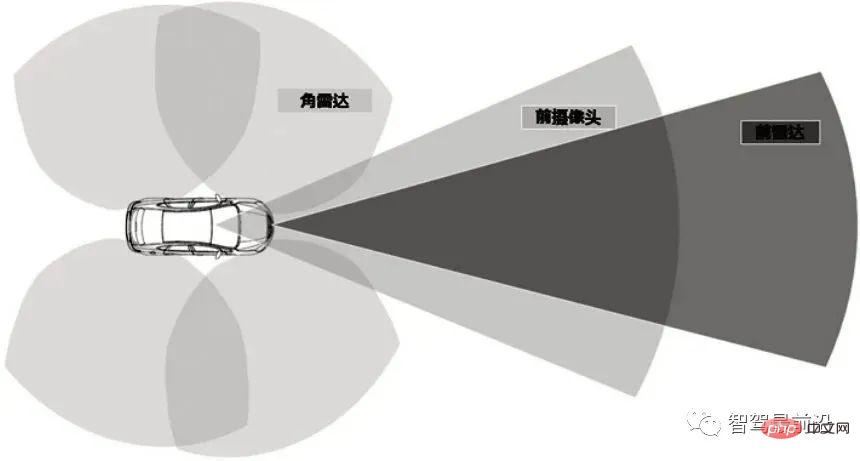
圖2 前向攝影機、前向毫米波雷達、角雷達融合
超音波雷達
根據超音波雷達短距離偵測目標物的特性(表6),超音波雷達依據不同數量組合,可實現PDC(倒車雷達)、APA(自動停車輔助)和BSD(盲點監測)功能。後保險桿上安裝4個超音波雷達,可實現PDC功能,有些車輛在前保險桿上同時安裝4個超音波雷達(前後共8個超音波雷達),倒車時偵測前方障礙物。在前後保險桿側面安裝4個超音波雷達,可實現近距離盲點監測功能,同時結合前後8個超音波雷達,共12個超音波雷達,可實現APA功能。如果車輛側面安裝有毫米波角雷達,實現BSD功能,則側面的超音波雷達就不用安裝。 BSD安裝超音波雷達的主要要因是其成本優勢。超音波雷達不同組合及功能見圖3。
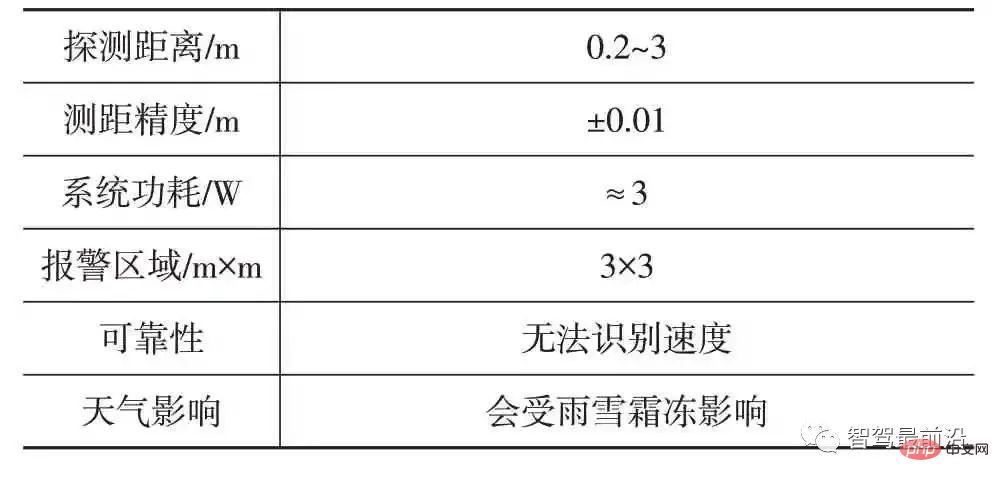
表6 超音波雷達部分參數及特點
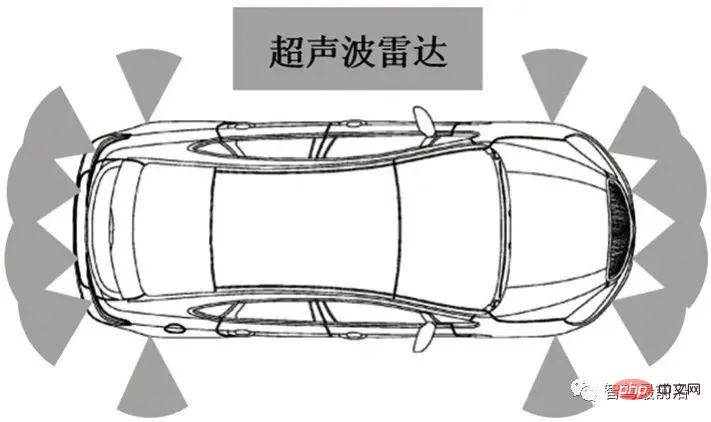
圖3 超音波雷達方案佈局
環視攝影機
AVM(全景式監控影像系統)通過前後左右4個影像感測器(環視攝影機)擷取車輛週邊環境數據,將影像透過CVBS(標清)/LVDS(高畫質)傳遞至全景影像控制器。若僅在後方裝1個攝像頭,可實現倒車影像功能。若同時在前後左右安裝4個攝像頭,透過對4個攝像頭輸入圖像進行畸變校正及裁剪,實現4個視圖及2D俯視圖效果集成,3D旋轉效果(高清方案)集成,最終通過MP5進行顯示。環景攝影機部分重要參數如表7,其佈置在整車示意見圖4。
感測器整車佈置融合
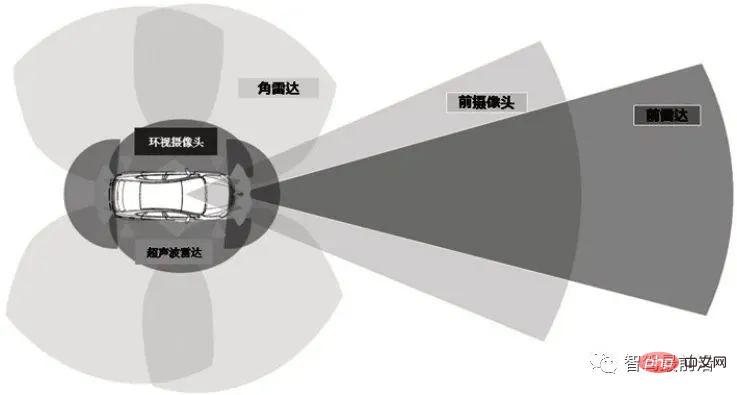
高階駕駛輔助系統的不同感測器之間的組合佈置,需要考慮到覆蓋範圍和冗餘性。不同感測器的感知範圍均有各自的優點和局限性,現在發展的趨勢是透過感測器資訊融合技術,彌補單一感測器的缺陷,提高整個智慧駕駛系統的安全性和可靠性。覆蓋範圍:車體360°均需覆蓋,依重要性,前方的探測距離要長(120 m),後方的探測距離稍短(80 m),左右側的探測距離最短(20 m)。為了確保安全性,每塊區域需要2個或2個以上的感測器覆蓋,以便相互校驗,如圖5所示為佈置方案。
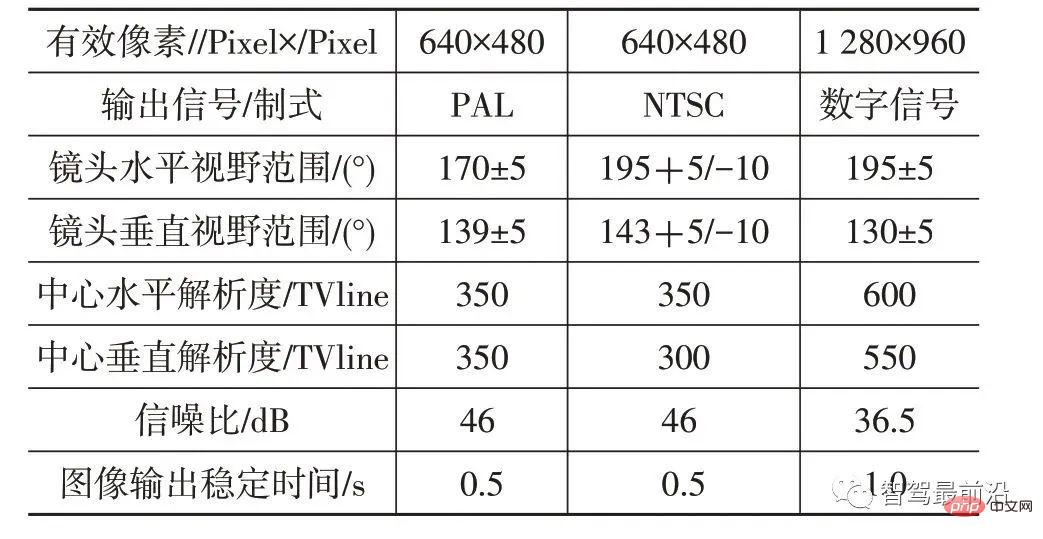
表7 環視攝影機部分參數
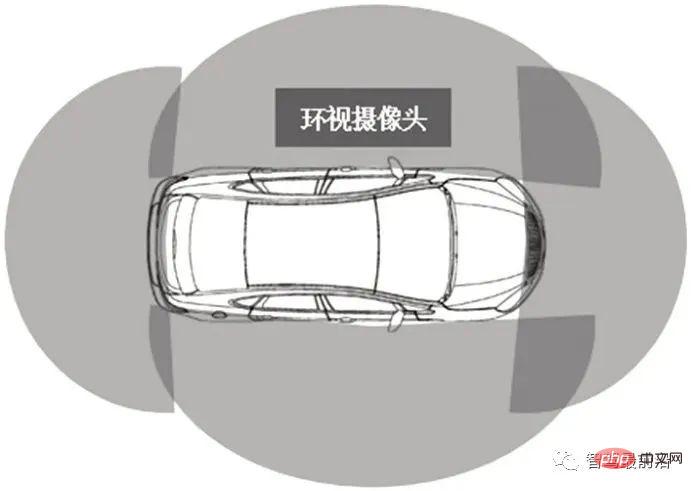
圖4 環景相機方案佈局
#圖5 感測器佈置融合示意圖
##圖5 感測器佈置融合示意圖
前向智慧攝影機和前向毫米波雷達佈置融合
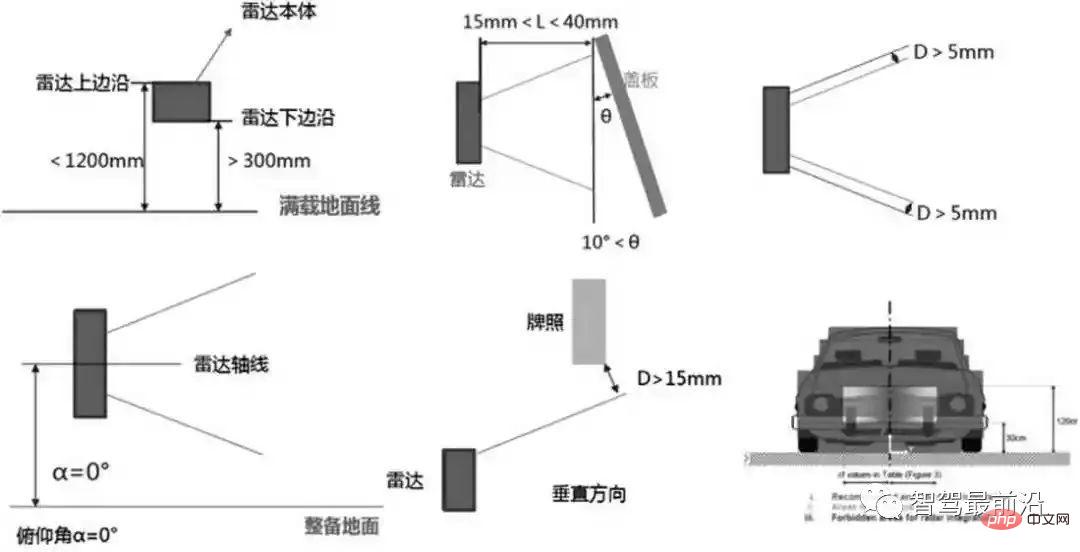
前雷達安裝位置根據雷達性能參數要求、車身造型,設定合理的佈置位置。雷達離地高度(雷達天線軸到地面的距離)建議50 cm,30 cm到120 cm之間都可接受。離地高度接近30 cm可能會有過多的地面反射訊號幹擾直接訊號接收和降低偵測的風險。雷達與保護蓋之間的距離大於15 mm(2倍波長,可避免複雜近場對雷達波束的影響),小於40 mm(以避免過大的雷達波相交面)。雷達橫向位置座標在-30 cm到30 cm之間。雷達如果安裝前蓋板,對蓋板也有特殊要求,例如曲率半徑>600 mm、波束與蓋板相交部分厚度均一、型面需要經過模擬測試、材質需要進行材料電性能測試、非噴塗件等。毫米波雷達波束與週邊結構間距>5 mm,與車輛角度-俯仰角、偏航角、側傾角為0°,雷達FOV與牌照框距離15 mm以上,避免安裝牌照後影響雷達偵測等等要求。如圖6所示。
圖6 前向毫米波雷達佈置示意
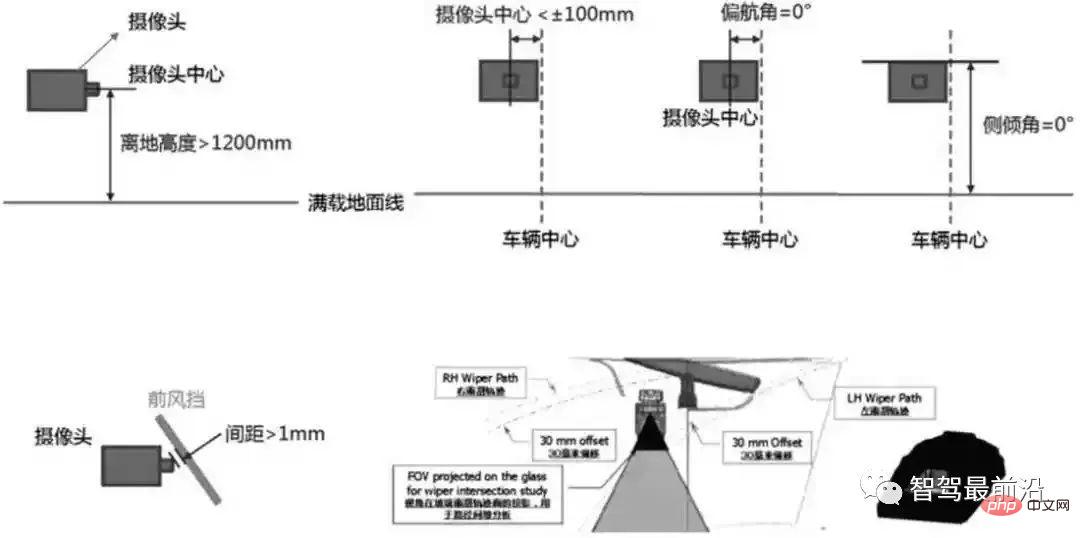
#前攝影機最好的垂直安裝位置是在擋風玻璃的中心,高度在1 200 mm以上為佳,可以允許偏移擋風玻璃中心線在10 cm以內。偏航角、側傾角、俯仰角最好為0°附近(±3°)。支架應該安裝在乾淨的玻璃區域,視角區域不能被絹印或印刷遮擋。攝影機視窗與雨刷軌跡線間距大於30 mm,鏡頭模組與擋風玻璃的之間間隙應可確保最小1 mm。開口應由投影在擋風玻璃各層的視角決定,攝影機支架和罩蓋上應設計通風孔(開孔面積大於120 mm2),確保空氣流通。支架安裝在擋風玻璃的位置公差通常是±1 mm(定位)和±2.5°(旋轉)(圖7)。
側向毫米波雷達(角雷達)佈置融合
#角雷達根據其性能參數要求、車身造型,設定合理的佈置位置,車身要預留佈置空間。角雷達配置高度要求:過低泥水污物影響雷達,太高離車輛近處的盲區會變大(可能會導致±20°以外無視野),建議高度在400 mm到1 000 mm之間。要達到盲點最小化,雷達與車輛縱軸線的夾角要在30°到45°之間為宜,雷達與車輛水平面夾角最好控制在90°。雷達FOV視野內無金屬,稜線,多層結構或材質,FOV與覆蓋件的最大角度為70°,覆蓋件要求平整,曲率要求大於350 mm。
圖7 前攝影機佈置示意
超音波雷達佈置融合# ###########為了實現APA功能,整車上要佈置12個超音波雷達,佈置數量較多。超音波雷達感測器安裝支架上,透過與保險桿蒙皮的黏接固定上。為了最大限度滿足探測要求,超音波雷達佈置位置提供了具體要求,見圖8。佈置具體要求有:避免將雷達佈置在凹陷於汽車保桿的表面、避免拍照干涉雷達偵測區域、遠離熱源排氣管、高功率燈具等等。 ######
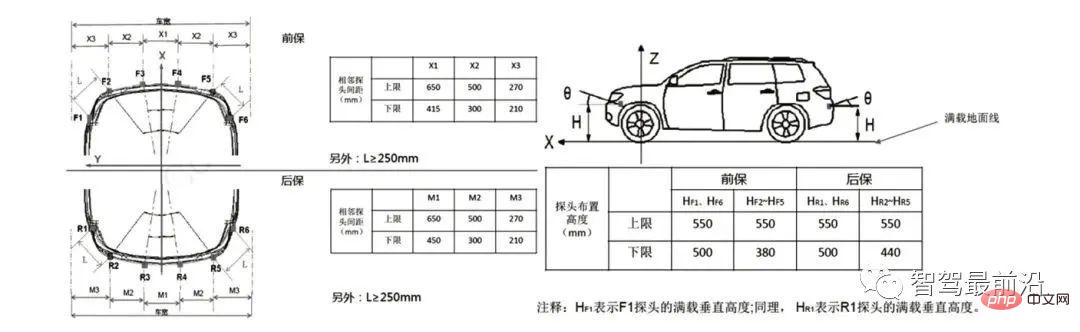
圖8 超音波雷達佈置位置需求
1 攝影機
##AVM環景系統,共需在車身前後左右佈置4個攝影機。前方攝影機安裝在前格柵附近區域。後方攝影機安裝在後背門牌照燈或附近區域。左右側攝影機需要安裝在後視鏡殼底部,需要在左右後視鏡中預留一個攝影機的孔位,以便於左右攝影機的安裝。攝影機佈置時應進行光學校核,確保相鄰攝影機影像有足夠的重合,並且在攝影機1°的組裝誤差範圍內應能確保影像拼接無黑邊,盲區不能超過企業標準所要求。為防止拍攝影像的改變,而導致全景影像無法拼接,攝影機應具有防旋轉的定位結構。
前後攝影機佈置需求:車輛滿載時,離地高度≥600 mm;偏離中心平面距離≤50 mm,建議置於中心平面;視軸與車輛XZ平面平行;視軸與車輛Z軸夾角建議45°到75°,光軸與地面線交點距車身最外側1 000~2 000 mm;盲區視野≤200 mm;攝影機垂直視野在3 000 mm處可完整看到直立於地面3 000 mm高的物體。如圖9為環景攝影機(前)佈置要求。
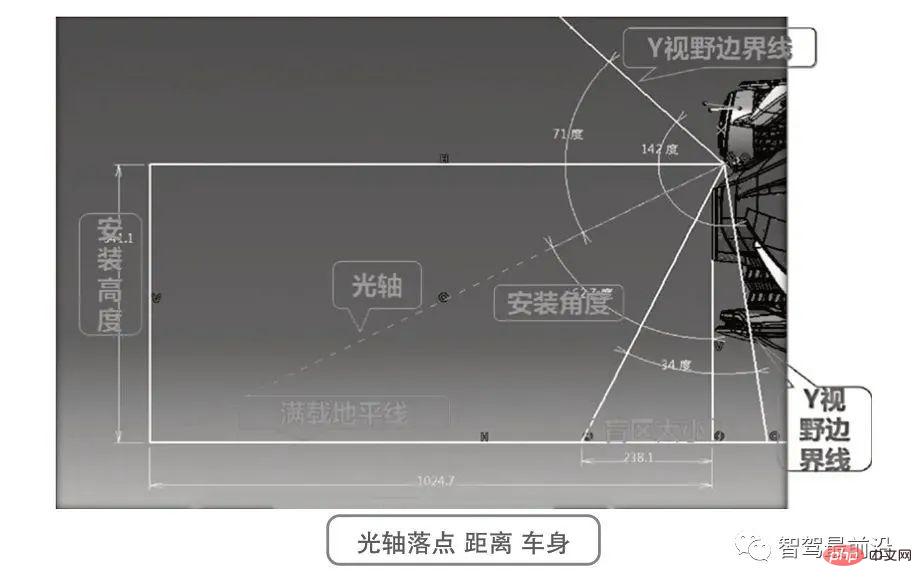
#圖9 環視攝影機(前)佈置要求
左右鏡頭(後視鏡上)佈置要求:攝影機前視圖,視角與垂直線之間夾角建議20~25°;視角與垂直線之間夾角建議1.5~5°;安裝高度大於900 mm;車身突出距離大於100 mm;視野需覆蓋車輛前後各10 m位置,且10 m的視野線與後視鏡殼體下緣距離大於1 mm,前後5 m的視野線與光軸面夾角均小於85°,且5 m的視野線與後視鏡殼體下緣最小距離大於1.2 mm;攝影機外突小於5 mm(可調整)。
高階駕駛輔助系統的感測器除了要確保偵測範圍的覆蓋冗餘度,在實際安裝中,還要符合每個感測器和車輛的安裝條件。本文介紹的感測器佈置參數是基於某款車型、特定供應商感測器產品進行的總結融合。不同感測器供應商,對佈置要求會有細微差異,在實際車型佈置過程中,要結合供應商提供的佈置要求,以及整車佈置、造型,進行適應性調整。 ######
以上是一文聊聊ADAS系統感測器應該如何佈置的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 行人軌跡預測有哪些有效的方法和普遍的Base方法?頂會論文分享!
Oct 17, 2023 am 11:13 AM
行人軌跡預測有哪些有效的方法和普遍的Base方法?頂會論文分享!
Oct 17, 2023 am 11:13 AM
軌跡預測近兩年風頭正猛,但大都聚焦於車輛軌跡預測方向,自動駕駛之心今天就為大家分享頂會NeurIPS上關於行人軌跡預測的演算法—SHENet,在受限場景中人類的移動模式通常在一定程度上符合有限的規律。基於這個假設,SHENet透過學習隱含的場景規律來預測一個人的未來軌跡。文章已經授權自動駕駛之心原創!作者的個人理解由於人類運動的隨機性和主觀性,目前預測一個人的未來軌跡仍然是一個具有挑戰性的問題。然而,由於場景限制(例如平面圖、道路和障礙物)以及人與人或人與物體的互動性,在受限場景中人類的移動模式通
 LimSim++:多模態大模型在自動駕駛中的新舞台
Mar 12, 2024 pm 03:10 PM
LimSim++:多模態大模型在自動駕駛中的新舞台
Mar 12, 2024 pm 03:10 PM
論文名稱:LimSim++:AClosed-LoopPlatformforDeployingMultimodalLLMsinAutonomousDriving專案首頁:https://pjlab-adg.github.io/limsim_plus/模擬器簡介隨著多模態大語言模型((M)LLM)在人工智慧領域研究熱潮,人工智慧領域研究熱潮,人工智慧領域研究熱潮其在自動駕駛技術的應用逐漸成為關注的焦點。這些模型透過強大的廣義理解和邏輯推理能力,為建立安全可靠的自動駕駛系統提供了有力支持。雖然已有閉迴路模擬平台如HighwayEnv、CA
 微軟更新 Visual Studio Code 1.80
Jul 10, 2023 pm 08:13 PM
微軟更新 Visual Studio Code 1.80
Jul 10, 2023 pm 08:13 PM
微軟近日推出了VisualStudioCode1.80,雖然本次更新於7月發布,官方仍將其稱為6月更新。在用戶安裝本次更新之後,內建終端可以直接顯示圖片,此外還優化了輔助功能。 VisualStudioCode先前發布的預覽版中,已支援在終端機中支援影像,而在新的1.80版本中預設為啟用狀態。為了能夠在終端中可以顯示圖像,圖像像素資料再透過特殊的轉義序列轉換為文本,最終寫入終端。如果要將典型的PNG,GIF或JPEG檔案傳遞到終端,則需要安裝imgcatpython軟體包,然後在終端中執行imgc
 星鐵最強輔助角色排名,8大輔助角色哪家強?其中一位堪稱「神中神」!
Feb 18, 2024 pm 03:33 PM
星鐵最強輔助角色排名,8大輔助角色哪家強?其中一位堪稱「神中神」!
Feb 18, 2024 pm 03:33 PM
崩壞星穹鐵道的輔助角色特別重要,一個好的輔助能讓隊伍提升巨大,今天小坊就為大家盤點下星鐵哪些輔助角色可以優先培養。 T2:指定配隊對策卡駕馭空駕馭空不僅能為主C提供高額的雙暴和攻擊加成,還有高額的削韌能力,是目前打核爆必帶的角色,但駕馭空需要嚴格配速,且實戰中也比較依賴手操,自動強度不穩定,同時非6命駕馭空也存在BUFF覆蓋率不足的問題。因此目前駕馭空的培養優先順序是比較低的,除非比較喜歡配速和手操的玩法或常用飲月雙狐隊和克羅駕馭隊伍,否則都可以盡量選擇其他輔助。艾絲妲艾絲妲作為開服免費贈送的輔助角色,能為全
 如何讓 iPhone 15 的 USB C 連接滑鼠使用?
Oct 23, 2023 pm 11:13 PM
如何讓 iPhone 15 的 USB C 連接滑鼠使用?
Oct 23, 2023 pm 11:13 PM
蘋果終於在iPhone15及15Pro系列,加入了USBC連接,讓大量電腦配件都可以在iPhone上使用,有用戶可能會在想,是否可以連接鍵盤及滑鼠,讓iPhone化身電腦般使用? 1:先進入設定,輔助使用2:選觸控3:選輔助觸控4:輔助觸控啟動5:啟動後就會看到像iPad使用觸控板的圓點,再為每個按鍵設定不同功能,例如主畫面鍵,輔助按鍵等,就可以進入以下步驟,到「設定」內的「輔助使用」。 6:選觸控7:輔助觸控8:選裝置9:選擇你連接了的滑鼠名稱10:加入按鈕,再點擊滑鼠上你想要設定的按鍵11:再
 一文聊聊ADAS系統感測器應該如何佈置
May 05, 2023 am 10:49 AM
一文聊聊ADAS系統感測器應該如何佈置
May 05, 2023 am 10:49 AM
本文首先介紹感測器佈置策略在進階駕駛輔助系統中的重要性,提出高階駕駛輔助系統感測器種類,包含前視智慧攝影機、前向和側向毫米波雷達(77GHz/22GHz)、超音波雷達以及環景攝影機,簡要闡述各感測器性能特點。然後,以目前某量產供應商方案為例,詳細介紹不同感測器性能參數,包括探測距離、探測範圍和對外部佈置環境的要求。介紹不同感測器獨自搭載車輛上可實現的功能和對不同駕駛輔助等級、不同功能組合下的不同感測器的融合策略。最後,介紹如何將不同感測器合理安裝到車輛上,根據需要達到的性能要求和探測範圍冗餘性,
 《天境傳說》輔助選擇推薦
Jan 14, 2024 pm 08:21 PM
《天境傳說》輔助選擇推薦
Jan 14, 2024 pm 08:21 PM
天境傳說是一款非常有趣的國風卡牌手遊,以二次元畫面為玩家帶來一場獨一無二的仙俠冒險。遊戲中可以召喚百種妖靈與你並肩作戰!遊戲中陣容很重要,其中天境傳說輔助怎麼選擇?以下是小編帶給大家的《天境傳說》輔助選擇推薦,想要了解的速來! 《天境傳說》輔助選擇推薦輔助(團隊輔助,治療隊友)鐵打的輔助,流水的輸出。看到風系那個叫龍太子的SP了麼,用他,5星就可以上場戰鬥,高星還有輸出能力,心願單上必佔一個位置。他的吸血光環能頂半個治療,可以持續到戰鬥結束疊20次的易傷buff,疊一次就是15%增傷,附贈的眩暈
 史上首次! AI駕駛戰機成功與人類飛行員空中「狗鬥」
Apr 22, 2024 am 09:04 AM
史上首次! AI駕駛戰機成功與人類飛行員空中「狗鬥」
Apr 22, 2024 am 09:04 AM
AI操縱的戰鬥機又進化了!近日,美國DARPA透露稱,去年9月一架由F-16改裝而成的AI驗證機,有史以來首次成功地在視距內與人類飛行員進行空中纏鬥(俗稱狗鬥),讓我們看到了人工智慧在空戰領域的應用前景。這架AI驗證機搭載了最新的人工智慧系統,能夠模擬人類的智慧決策,並具備自主飛行和作戰能力。透過與飛行員進行模擬空戰,驗證機顯示出了驚人的戰鬥技巧和反應速度,成功地擊敗了多名訓練有素的飛行員。這次的實驗標該驗證機代號為X-62AVISTA,是一架F-16D(Block30)雙座飛機,人類飛行員
