

位元組AI Lab核心技術贏得Habitat Challenge 2022主動導航冠軍,該技術將傳統方法與模仿學習相結合。

物件目標導航 (Object Navigation) 是智慧機器人的基本任務之一。在這個任務中,智慧機器人在一個未知的新環境中主動探索並找到人類指定的某一類物件。物體目標導航任務面向未來家庭服務機器人的應用需求,當人們需要機器人完成某些任務時,例如拿一杯水,機器人需要先尋找並移動到水杯的位置,進而幫人們取水杯。
Habitat Challenge 挑戰賽由 Meta AI 等機構共同舉辦,是物體目標導航領域的知名賽事之一,截至 2022 今年已連續舉辦 4 屆,本次比賽共有 54 支參賽隊伍參加。在比賽中,位元組跳動 AI Lab-Research 團隊的研究者針對現有方法的不足,提出了一個全新的物件目標導航框架。該框架巧妙地將模仿學習與傳統方法結合,從一眾方法中脫穎而出獲得冠軍。在關鍵指標 SPL 中大幅超過了第二名及其他參賽隊伍的結果。歷史上該賽事的冠軍隊伍一般是 CMU、UC Berkerly、Facebook 等知名研究機構。
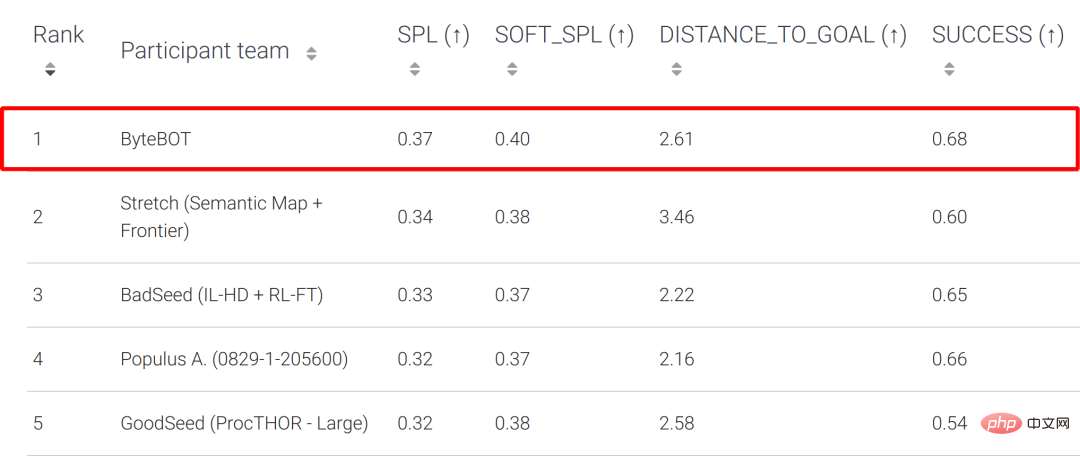
Test-Standard 名單
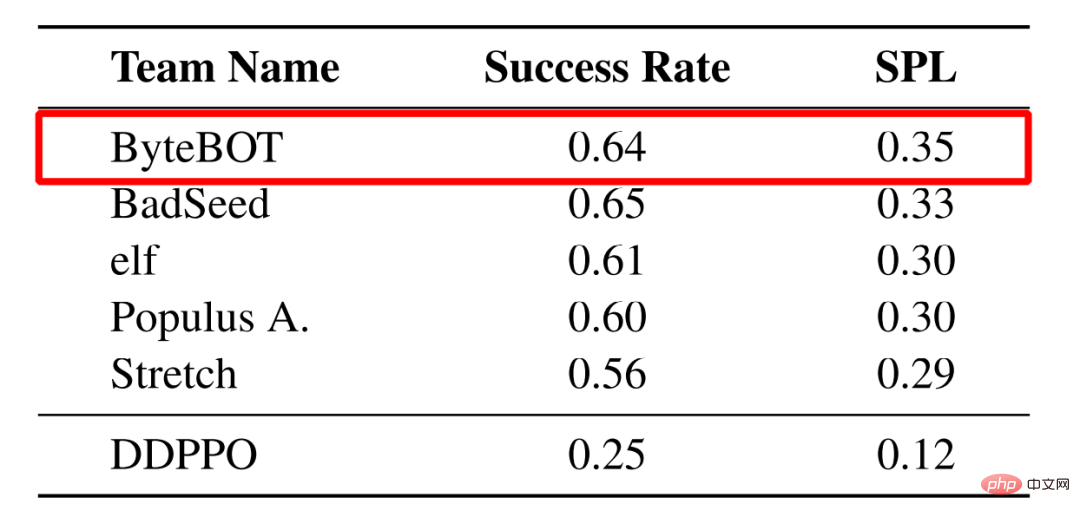
Test-Challenge 名單
Habitat Challenge 競賽官網:https://aihabitat.org/challenge/2022/
Habitat Challenge 比賽LeaderBoard:https://eval.ai/web/challenges/challenge-page/1615/leaderboard
1 . 研究動機
目前的物件目標導航方法可以大致分為端到端的方法和基於地圖的方法兩大類。端到端的方法提取輸入的感測器資料的特徵,再送入一個深度學習模型中得到action,此類方法一般基於強化學習或模仿學習(如圖1Map-less methods);基於地圖的方法一般會構建顯式或隱式地圖,然後透過強化學習等方法在地圖上選取一個目標點,最後規劃路徑並得到action(如圖1Map-based method)。
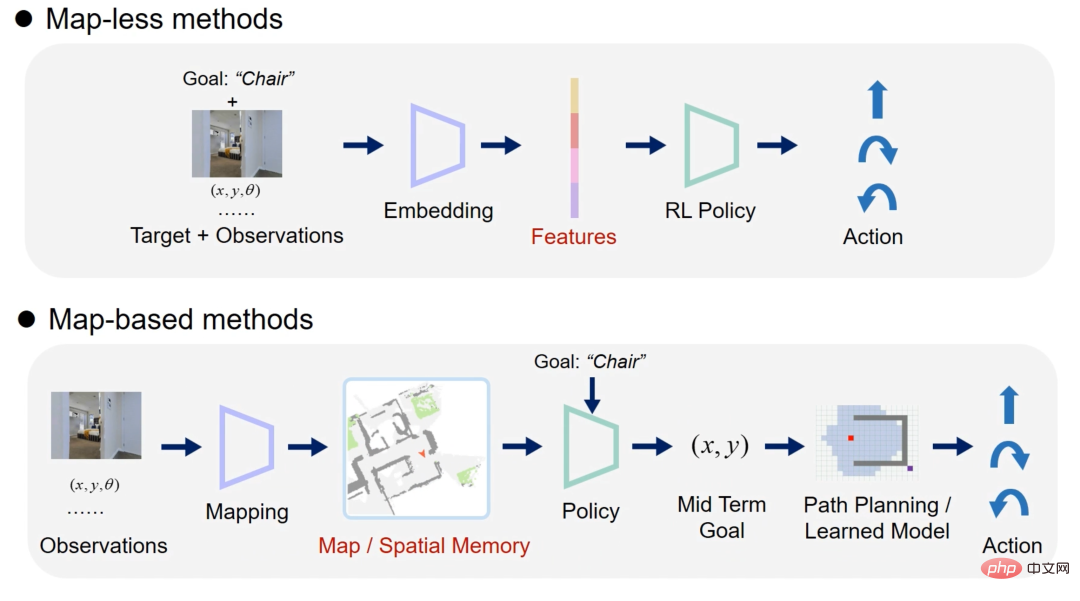
圖1端到端的方法(上)和基於地圖的方法(下)流程示意圖
在經過大量實驗在比較兩類方法後,研究者發現這兩類方法各有優劣:端到端的方法不需要建構環境的地圖,因此更簡潔,不同場景的泛化能力更強。但由於網路需要學習編碼環境的空間訊息,依賴大量的訓練數據,且難以同時學習一些簡單的行為,例如在目標物體附近停下來。而基於地圖的方法使用柵格來儲存特徵或語義,具有顯式空間訊息,因此這類行為的學習門檻較低。但它非常依賴準確的定位結果,而且在一些如樓梯等環境中,需要人工設計感知和路徑規劃策略。
基於上述結論,位元組跳動 AI Lab-Research 團隊的研究者們希望將兩類方法的優勢結合起來。然而這兩類方法的演算法流程差異很大,難以直接組合;此外也很難設計出一種策略直接融合兩種方法的輸出。因此研究者設計了一種簡單但有效的策略,使兩類方法根據機器人的狀態交替進行主動探索和物體搜索,從而將各自的優勢最大程度地發揮出來。
2. 競賽方法
演算法主要有兩個分支組成:基於機率地圖的分支和端到端的分支。演算法的輸入是第一視角的 RGB-D 影像和機器人位姿,以及需要尋找的目標物件類別,輸出是下一步動作 (action)。首先對 RGB 影像進行實例分割,並將其與其他原始輸入資料一起傳給兩個分支。兩個分支分別輸出各自的 action,並由一個切換策略決定最終輸出的 action。
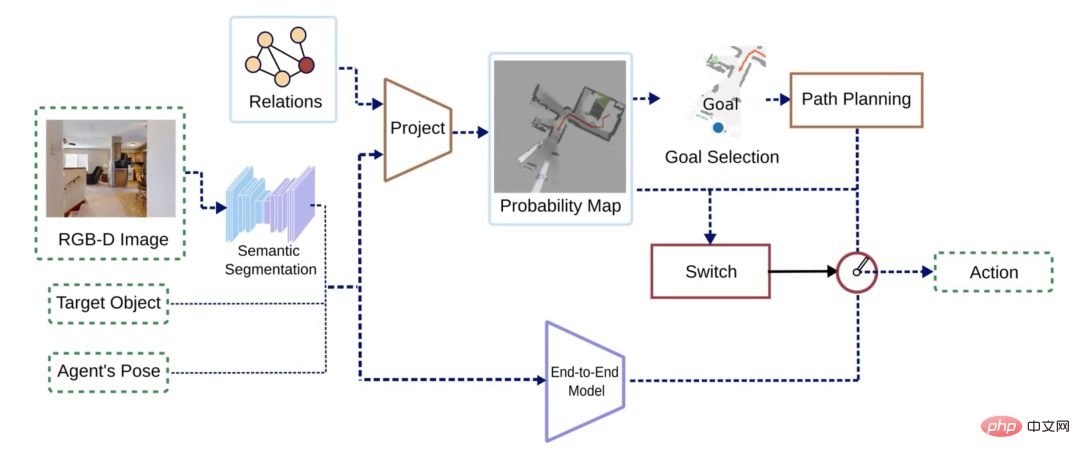
圖2 演算法流程示意圖
#基於機率地圖的分支
基於機率地圖的分支借鑒了Semantic linking map[2] 的思想,對作者原來發表在IROS 機器人頂會的論文[3]的方法進行了簡化。此分支根據輸入的實例分割結果、深度圖和機器人位姿,一方面建立 2D 語意地圖;另一方面基於預先學習的物件間關聯機率,對一張機率地圖進行更新。
機率地圖的更新方式包括以下幾種:當檢測到目標物體但沒有足夠把握時(置信機率confidence score 低於閾值),此時應該繼續靠近觀察,因此機率地圖上相應區域的機率值應該提高(如圖3 上方所示);同理,如果檢測到和目標物體有關聯的物體(例如桌子和椅子放在一起的機率比較高),則相應區域的機率值也會提高(如圖3 下方)。演算法透過選擇機率最高的區域作為目標點,鼓勵機器人靠近潛在目標物體以及關聯物體進一步觀察,直到找到置信機率高於閾值的目標物體。
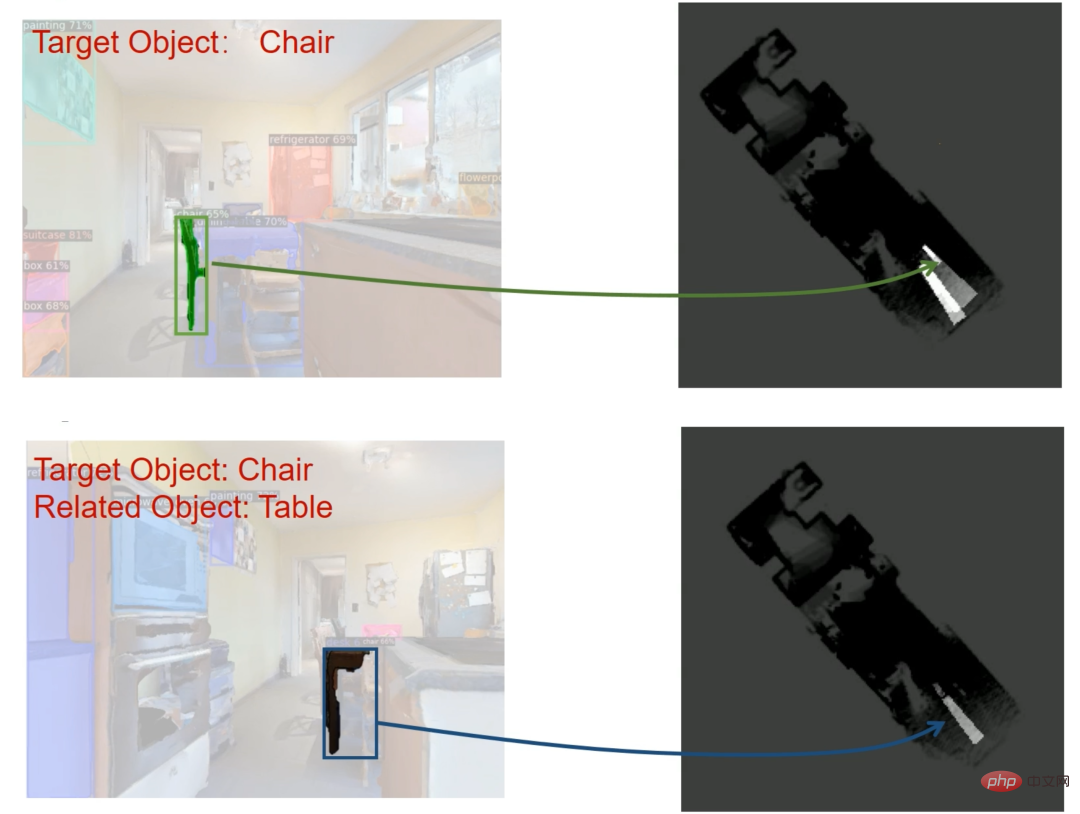
圖3 機率地圖更新方式示意圖
端到端的分支
端對端分支的輸入包括RGB-D 影像、實例分割結果、機器人位姿,以及目標物件類別,並直接輸出action。端對端分支的主要作用是引導機器人像人類一樣尋找物體,因此採用了 Habitat-Web[4] 方法的模型和訓練流程。此方法基於模仿學習,透過在訓練集中收集人類尋找物體的範例樣本訓練網路。
切換策略
切換策略主要根據機率地圖和路徑規劃的結果,在機率圖分支和端對端分支輸出的兩個action 中選擇一個作為最終輸出。當機率地圖中沒有機率大於閾值的柵格,機器人需要對環境進行探索;當地圖上無法規劃出可行路徑時,此時機器人可能處於一些特殊環境(如樓梯),這兩種情況下會採用端到端分支,使機器人具備足夠的環境適應能力。其他情況則選擇機率圖分支,充分發揮其在尋找目標物體方面的優勢。
此切換策略的效果如影片所示,機器人一般情況下利用端到端分支高效地探索環境,一旦發現了可能的目標物體或關聯物體,則切換到機率地圖分支靠近觀察,如果目標物體的置信機率大於閾值,則在目標物體處停下來;否則該區域的機率值會不斷降低,直到沒有機率大於閾值的柵格,機器人重新切換回端到端繼續探索。
從影片中可以看出,這種方法兼具了端到端方法和基於地圖的方法的優勢。兩個分支各司其職,端到端方法主要負責探索環境;機率地圖分支負責靠近感興趣區域進行觀察。因此該方法不僅能夠在複雜場景中探索(如樓梯),還降低了端到端分支的訓練要求。
3. 總結
針對物體主動目標導航任務,位元組跳動 AI Lab-Research 團隊提出了一種結合經典機率地圖與現代模仿學習的框架。該框架是對傳統方法與端到端方法相結合的成功的嘗試。在 Habitat 競賽中,位元組跳動 AI Lab-Research 團隊提出的方法大幅超出了第二名及其他參賽隊伍的結果,證明了演算法的先進性。透過將傳統方法引入目前主流的 Embodied AI 端到端方法,來進一步彌補端到端方法的一些不足,從而使得智慧機器人在幫助人、服務人的道路上更進一步。
近期,位元組跳動AI Lab-Research 團隊在機器人領域的研究也被CoRL、IROS、ICRA 等機器人頂會收錄,其中包括物件位姿估計、物件抓取、目標導航、自動組裝、人機互動等機器人核心任務。
【CoRL 2022】Generative Category-Level Shape and Pose Estimation with Semantic Primitives
- 論文地址:https://arxiv.org/abs/2210.01112
【IROS 2022】3D Part Assembly Generation with Instance Encoded Transformer
- 論文網址:https://arxiv.org/abs/2207.01779
【IROS 2022 】Navigating to Objects in Unseen Environments by Distance Prediction
- 論文地址:https://arxiv.org/abs/2202.03735
【EMNLP 2022】Towards Unifying Reference Expression Generation and Comprehension
- 論文網址:https://arxiv.org/pdf/2210.13076
【ICRA 2022】Learning Design and Construction with Varying-Sized Materials via Prioritized Memory Resets
- 論文地址:https://arxiv.org/abs/2204.05509
#【IROS 2021】Simultaneous Semantic and Collision Learning for 6-DoF Grasp Pose Estimation
- #論文網址:httpshttps ://arxiv.org/abs/2108.02425
【IROS 2021】Learning to Design and Construct Bridge without Blueprint
- #論文網址:https://arxiv.org /abs/2108.02439
4. 參考文獻
[1] Yadav, Karmesh, et al. "Habitat-Matterport 3D Semantics Dataset." arXiv preprint arXiv:2210.05633 (202) .
[2] Zeng, Zhen, Adrian Röfer, and Odest Chadwicke Jenkins. "Semantic linking maps for active visual object search." 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020. IEEE,
[3] Minzhao Zhu, Binglei Zhao, and Tao Kong. "Navigating to Objects in Unseen Environments by Distance Prediction." arXiv preprint arXiv:2202.03735 (20#arXiv preprint arXiv:2202.03735
(2022).#[4] Ramrakhya, Ram, et al. "Habitat-Web: Learning Embodied Object-Search Strategies from Human Demonstrations at Scale." Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2022.
#5. 關於我們
位元組跳動AI Lab NLP&Research 專注於人工智慧領域的前沿技術研究,涵蓋了自然語言處理、機器人等多個技術研究領域,同時致力於將研究成果落地,為本公司現有的產品和業務提供核心技術支援和服務。團隊技術能力正透過火山引擎對外開放,賦能 AI 創新。
位元組跳動AI-Lab NLP&Research 聯絡方式
- ##招募諮詢:fankaijing@bytedance.com
- 學術合作:luomanping@bytedance.com
- #
以上是位元組AI Lab核心技術贏得Habitat Challenge 2022主動導航冠軍,該技術將傳統方法與模仿學習相結合。的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)
熱門話題



 第二代Ameca來了!和觀眾對答如流,臉部表情更逼真,會說幾十種語言
Mar 04, 2024 am 09:10 AM
第二代Ameca來了!和觀眾對答如流,臉部表情更逼真,會說幾十種語言
Mar 04, 2024 am 09:10 AM
人形機器人Ameca升級第二代了!最近,在世界行動通訊大會MWC2024上,世界上最先進機器人Ameca又現身了。會場周圍,Ameca引來一大波觀眾。得到GPT-4加持後,Ameca能夠對各種問題做出即時反應。 「來一段舞蹈」。當被問及是否有情感時,Ameca用一系列的面部表情做出回應,看起來非常逼真。就在前幾天,Ameca背後的英國機器人公司EngineeredArts剛剛示範了團隊最新的開發成果。影片中,機器人Ameca具備了視覺能力,能看見並描述房間整個狀況、描述具體物體。最厲害的是,她還能
 AI如何使機器人更具自主性和適應性?
Jun 03, 2024 pm 07:18 PM
AI如何使機器人更具自主性和適應性?
Jun 03, 2024 pm 07:18 PM
在工業自動化技術領域,最近有兩個熱點很難被忽視:人工智慧(AI)和英偉達(Nvidia)。不要改變原內容的意思,微調內容,重寫內容,不要續寫:「不僅如此,這兩者密切相關,因為英偉達在不僅僅局限於其最開始的圖形處理單元(GPU),正在將其GPU科技擴展到數位孿生領域,同時緊密連接著新興的AI技術。泰瑞達機器人及其MiR和優傲機器人公司。 Recently,Nvidiahascoll
 2 個月不見,人形機器人 Walker S 會摺衣服了
Apr 03, 2024 am 08:01 AM
2 個月不見,人形機器人 Walker S 會摺衣服了
Apr 03, 2024 am 08:01 AM
機器之能報道編輯:吳昕國內版的人形機器人+大模型組隊,首次完成疊衣服這類複雜柔性材料的操作任務。隨著融合了OpenAI多模態大模型的Figure01揭開神秘面紗,國內同行的相關進展一直備受關注。就在昨天,國內"人形機器人第一股"優必選發布了人形機器人WalkerS深入融合百度文心大模型後的首個Demo,展示了一些有趣的新功能。現在,得到百度文心大模型能力加持的WalkerS是這個樣子的。和Figure01一樣,WalkerS沒有走動,而是站在桌子後面完成一系列任務。它可以聽從人類的命令,折疊衣物
 首個自主完成人類任務機器人出現,五指靈活速度超人,大模型加持虛擬空間訓練
Mar 11, 2024 pm 12:10 PM
首個自主完成人類任務機器人出現,五指靈活速度超人,大模型加持虛擬空間訓練
Mar 11, 2024 pm 12:10 PM
這週,由OpenAI、微軟、貝佐斯和英偉達投資的機器人公司FigureAI宣布獲得接近7億美元的融資,計劃在未來一年內研發出可獨立行走的人形機器人。而特斯拉的擎天柱也屢屢傳出好消息。沒人懷疑,今年會是人形機器人爆發的一年。一家位於加拿大的機器人公司SanctuaryAI最近發布了一款全新的人形機器人Phoenix。官方號稱它能以和人類一樣的速率自主完成許多工作。世界上第一台能以人類速度自主完成任務的機器人Pheonix可以輕輕地抓取、移動並優雅地將每個物件放置在它的左右兩側。它能夠自主辨識物體的
 塑造未來的十款類人機器人
Mar 22, 2024 pm 08:51 PM
塑造未來的十款類人機器人
Mar 22, 2024 pm 08:51 PM
以下10款類人機器人正在塑造我們的未來:1、ASIMO:ASIMO由Honda開發,是最知名的人形機器人之一。 ASIMO高4英尺,重119磅,配備先進的感測器和人工智慧功能,使其能夠在複雜的環境中導航並與人類互動。 ASIMO的多功能性使其適用於各種任務,從幫助殘疾人到在活動中進行演示。 2、Pepper:由SoftbankRobotics創建,Pepper旨在成為人類的社交伴侶。憑藉其富有表現力的面孔和識別情緒的能力,Pepper可以參與對話、在零售環境中提供幫助,甚至提供教育支持。 Pepper的
 人形機器人會變魔術了,春晚節目組了解一下
Feb 04, 2024 am 09:03 AM
人形機器人會變魔術了,春晚節目組了解一下
Feb 04, 2024 am 09:03 AM
一眨眼的功夫,機器人都已經學會變魔術了?只見它先是拿起桌上的水勺,向觀眾證明了裡面什麼也沒有……然後,它又把手中雞蛋似的物體放了進去,然後把水勺放回桌子上,開始「施法」… …就在它把水勺再次拿起的時候,奇蹟發生了。原先放進去的雞蛋不翼而飛,跳出的東西變成了一個籃球……再來看一遍連貫動作:△此動圖為二倍速一套動作下來如行雲流水,只有把視頻用0.5倍速反复觀看,才終於發現其中的端倪了:如果手速再快一些,大概真的就可以瞞天過海了。有網友感嘆,機器人變魔術的程度比自己還要高:為我們表演這段魔術的,是Mag
 雲鯨逍遙001掃拖機器人,長「腦子」了! | 體驗
Apr 26, 2024 pm 04:22 PM
雲鯨逍遙001掃拖機器人,長「腦子」了! | 體驗
Apr 26, 2024 pm 04:22 PM
近幾年最受消費者歡迎的智慧家電,掃拖機器人可謂是其中之一。它所帶來的操作便利性,甚至是無需操作,讓懶人們釋放了雙手,讓消費者能夠從日常的家務中「解放」出來,也能拿更多的時間花在自己喜歡的事情上,變相提高了生活品質。藉著這股熱潮,市面上幾乎所有的家電產品品牌都在做自己的掃拖機器人,一時間使得整個掃拖機器人市場熱鬧非凡。但市場的快速拓張必然會帶來一個隱患:很多廠商會採用機海戰術的方式快速佔領更多的市場份額,從而導致很多新品並沒有什麼升級點,說它是“套娃”機型也不為過。不過,並不是所有的掃拖機器人都是
 美國大學開《薩爾達傳說:王國之淚》工程學讓學生競賽打造機器人
Nov 23, 2023 pm 08:45 PM
美國大學開《薩爾達傳說:王國之淚》工程學讓學生競賽打造機器人
Nov 23, 2023 pm 08:45 PM
創下有史以來銷售速度最快的任天堂遊戲《薩爾達傳說:王國之淚》(TheLegendofZelda:TearsoftheKingdom)不僅因為左納烏科技帶來各種「薩爾達創作家」社群內容,也成為美國馬裡蘭大學(UniversityofMaryland;UMD)全新工程學的課程。重寫:《薩爾達傳說:王國之淚》是任天堂創紀錄銷售最快的遊戲之一。不只因為左納烏科技帶來了豐富的社群內容,也成為了美國馬裡蘭大學全新工程學課程的一部分今年秋季,馬裡蘭大學的RyanD.Sochol副教授開設了一門名為《
