
點雲是具有 3 軸座標(x, y, z)的點的集合。這種類型的集合可以來自不同的來源並以不同的格式保存。可以使用稱為表面重建演算法的不同演算法將點雲轉換為 3D 網格。為了執行表面重建,本指南使用PyVista,這是一個易於使用的函式庫來處理 3D 資料。
要從 PyPI 安裝最新版本的 PyVista,請使用:
pip install pyvistaa
產生網格的程式碼非常短。你只需要提供一個N × 3形狀的 NumPy 數組,而N是點的數量,三個是每個點的x位置、y位置和z位置。這個過程中最具挑戰性的部分是獲取感興趣對象的點雲,因為一旦有了它,生成網格的完整代碼就非常短:
import numpy as np import pyvista as pv # NumPy array with shape (n_points, 3) points = np.genfromtxt('points.csv', delimiter=",", dtype=np.float32) point_cloud = pv.PolyData(points) mesh = point_cloud.reconstruct_surface() mesh.save('mesh.stl')
在此示例中,點雲是從以下格式的CSV 檔案中提取的:
不管你的觀點來自哪裡,重要的是pv.PolyData(points)按照上面提到的格式向方法傳遞一個NumPy 數組。
如果你想視覺化點雲使用:
point_cloud.plot(eye_dome_lighting= True )
Eye Dome 照明是一種著色技術,可在視覺化點雲時改善深度感知。
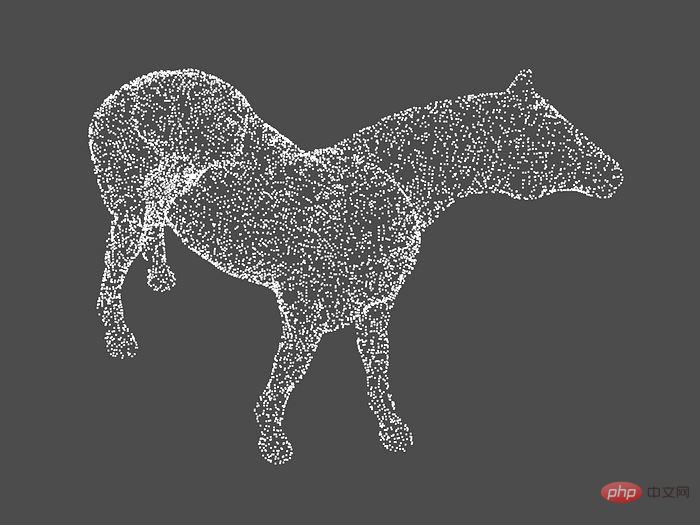
點雲視覺化的範例。來自PyVista 範例的來源檔案。
如果您想要視覺化產生的網格,請使用:
mesh.plot(color='orange')
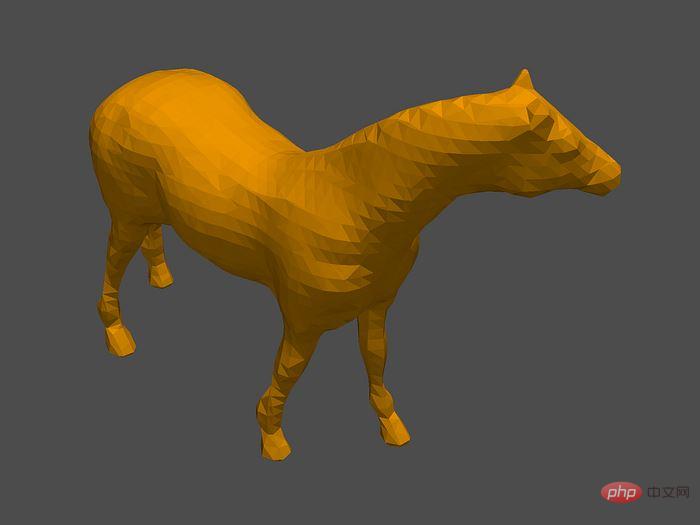
#網格視覺化的範例。來自PyVista 範例的來源檔案。
以上是怎麼使用Python點雲產生3D網格的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















