
考慮「人群排隊進入電梯」這樣一個場景。 如果先進去的人是「自私」的,那麼他進入電梯後就會停在原地,這時候會擋住後面的人進入電梯。如果前面的人是「無私」的,那麼他會主動往裡走,這樣後面的人才會順利的進入電梯。
受到這個場景的啟發,研究人員開發了無私探索的策略,這個簡單的策略能夠大幅度提升機器人集群系統的合作效率,該成果於2023年6月發表在Nature Communications。

▍引進「無私」探索:讓機器人合作效率更高
在眾多機器人集群系統中,集群隊形控制是一個重要而獨特的問題。相較於其它群聚協同問題,隊形控制有一個獨特的技術挑戰,即全局隊形實際上是一個全局約束條件。這個約束條件使得原本是合作的機器人之間產生了競爭關係。從本質上來說,正是這種競爭關係為隊形控制帶來了許多困難。
傳統方法通常使用目標分配來解決機器人之間的競爭問題。 然而,基於分配的方法具有容錯性和適應性較弱的問題。當分配的目標不合理或某些機器人故障時,需要不斷重新分配目標,會導致效率較低。
近日,來自西湖大學、北京航空航天大學、清華大學和英國謝菲爾德大學的研究人員提出了一種基於「無私」探索策略的新型機器人協調控制方法,其核心是透過基於Mean -Shift的演算法來化解機器人之間的競爭衝突:即當一個機器人預測到將與周圍機器人產生競爭時,會主動放棄其當前位置,轉而去向更空曠的區域。 正因為該策略能「主動」化解衝突而被稱為「無私」策略。
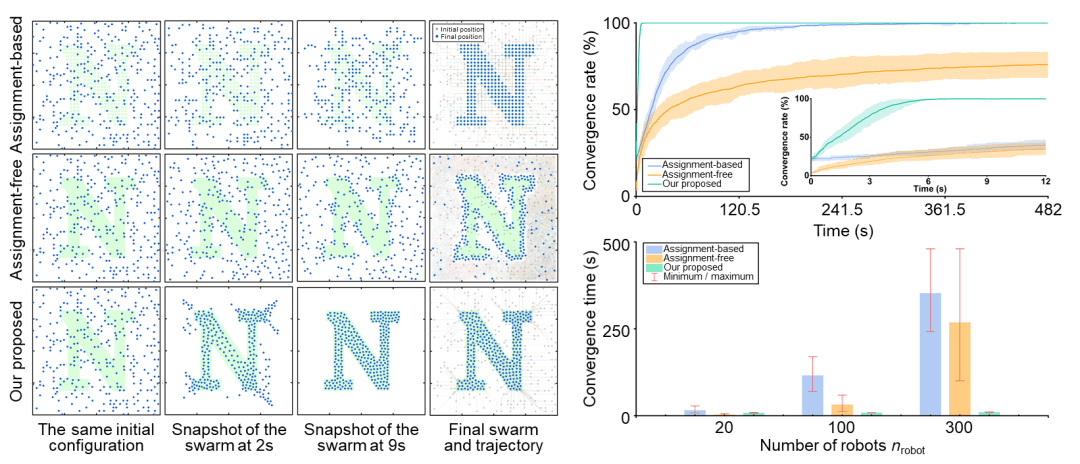
相比最新研究工作,所提出的「無私」探索策略的效率在集群規模較大時能夠擁有數十倍的提升,並且這種提升會隨著集群規模的增加而進一步增強。而且,由於不依賴目標分配,該策略天然具有良好的容錯性和適應性,可以拓展到複雜空間探索、協同搬運等任務。
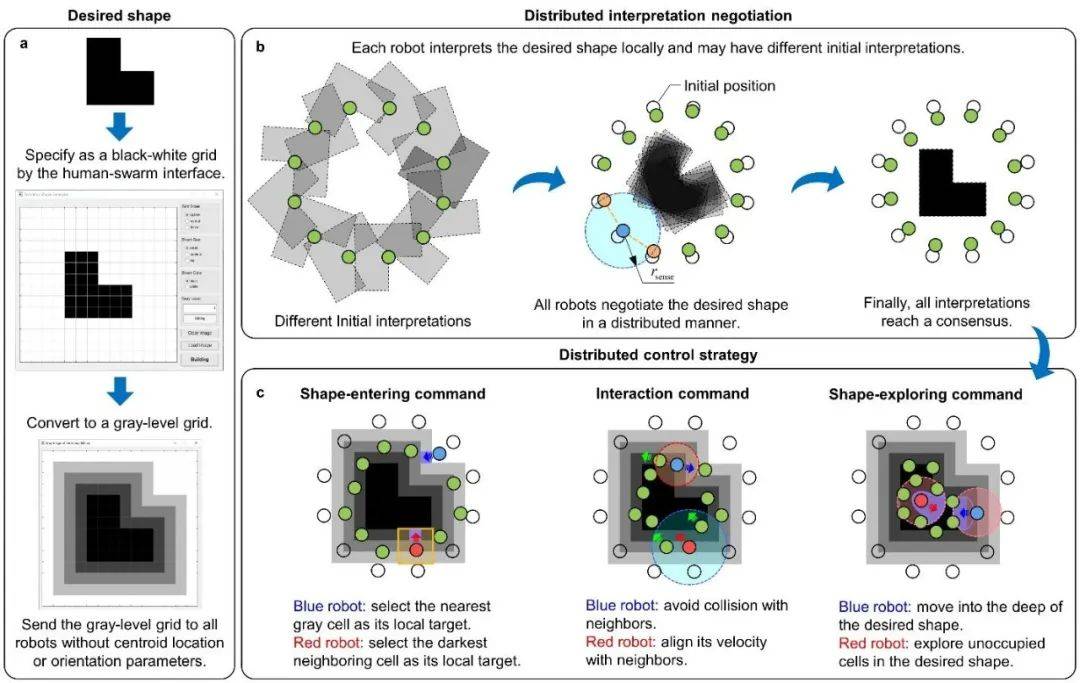
「無私」探索策略由三個部分組成。 第一部分是人—集群互動系統,用來發展人所需要的幾何隊形。第二部分是分散式協商演算法,所有機器人以分散式的方式與周圍鄰居協商目標隊形的歐氏參數,包括位置和方向。第三部分也是最重要的,就是分散式隊形控制演算法。 此控制演算法由三個控制指令組成。 首先是隊形進入指令,其作用是將機器人引入目標隊形內。第二是隊形探索指令,其作用是透過Mean-Shift的機制探索隊形內的可行區域。第三是交互指令,其作用是實現機器人之間的避撞和速度對齊。
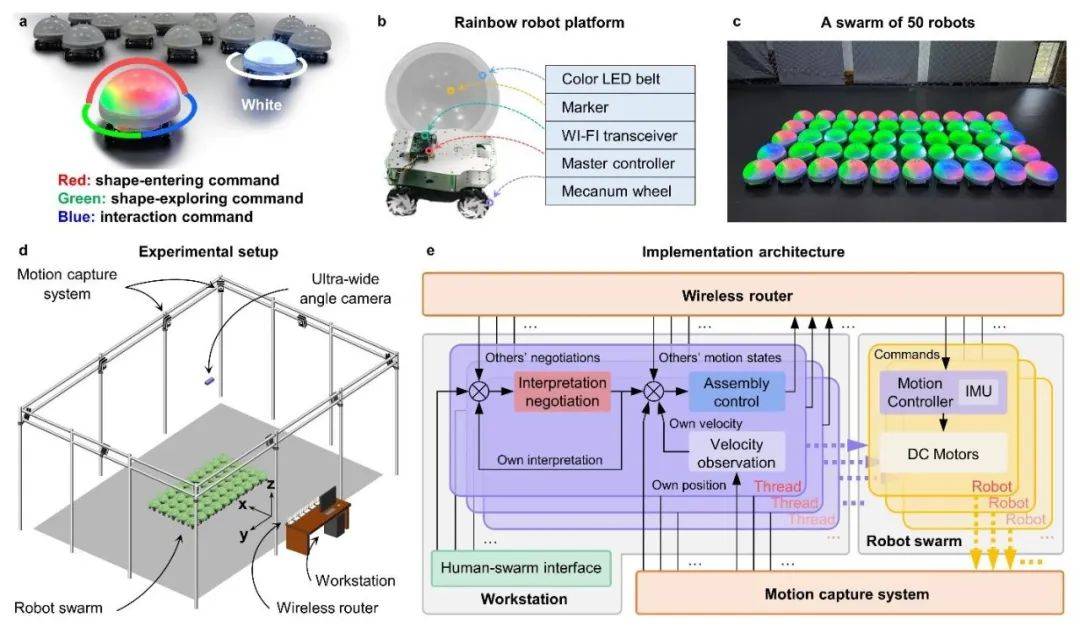
基於此策略,研究團隊開發了包含50台地面機器人的集群實驗系統。相關實驗是在室內動捕系統的支持下進行的,透過多執行緒分散式並行方式實現。
▍機器人叢集執行多種任務:擁有高效協同與自主控制能力
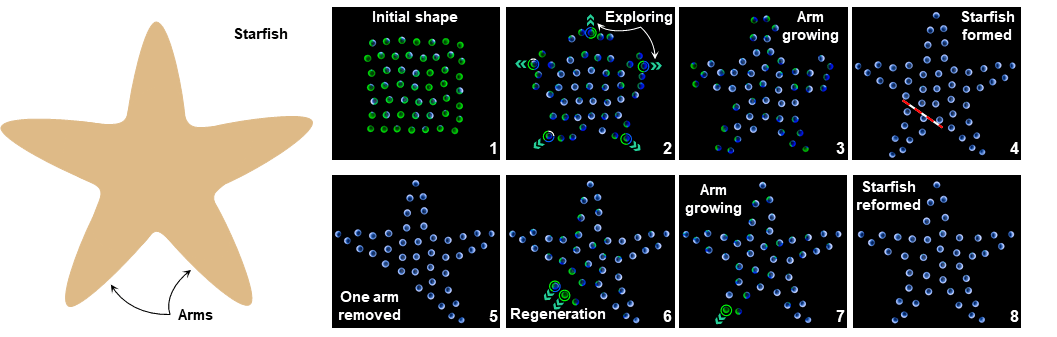
「無私」探索策略能夠控制機器人自組織形成複雜非凸形狀。例如一個具有豐富枝丫的「雪花」隊形,在該策略作用下,機器人集群能夠精確實現隊形,而不會陷入局部最優。而且,機器人集群可以在這種形成不同的非凸隊形,並且能夠從一種形狀平滑切換到另一種形狀。
「無私」探索策略相比於最新的研究工作具有數十倍效率的提升,而且這種提升會隨著集群規模的增加而進一步增強。
因不受目標分配和機器人數量變化等問題的限制,"無私"探索策略具備自適應能力。例如,當一部分機器人被移出集群時,整個系統不需要任何的故障檢測或容錯控制,可以無縫重新組成隊形,這使得整個系統具有了一定的「再生」能力。
「無私」探索策略的另一個特點是能夠追蹤時變隊形。一個重要應用是實現多機器人協同搬運。在這個過程當中,一方面機器人要實現隊形保持,另外一方面要跟隨領導者實現隊形運動,從而實現貨物的協同搬運。
此外,「無私」探索策略可以用來探索複雜環境。例如,可以模擬人群通過狹窄入口進入到一個房間,而且不會被卡在入口處。值得指出的是,這個例子非常生動地詮釋了「無私」探索的策略。 它非常類似於人群進電梯的生活場景:假如有很多人要進入到電梯當中,如果一個人是「自私」的,那麼他進入電梯後會停止運動,因為他已經達到自己的目標了。然而,這時候會擋住後面的人進入。 如果這個人是「無私」的,那麼他會主動往裡面走,這樣後面的人才會順利地進入。
又例如,可以用來探索複雜迷宮。雖然迷宮當中有許多轉角等非凸結構該策略由於其良好的探索性,依然能夠成功實現對迷宮的全覆蓋探索,而不會陷入局部最優點。
▍結論
#這篇文章所提出的演算法的思路非常簡潔,但正是這樣一個簡單的想法解決了集群隊形控制當中長期以來面臨的一個重要問題。 未來可以進一步擴展機器人平台的感知能力,讓整個系統更加智慧化,能湧現出真正類似高智慧生物的群聚行為。
▍文章來源
#G. Sun, R. Zhou, Z. Ma, Y. Li, R. Groß, Z. Chen, and S. Zhao*, "Mean-shift exploration in shape assembly of robot swarms", Nature Communications, vol . 14, pp. 3476, 2023. https://doi.org/10.1038/s41467-023-39251-5
以上是如何提高集群協作效率?中外團隊合作研發基於平均值偏移的機器人隊形控制策略的詳細內容。更多資訊請關注PHP中文網其他相關文章!






















