

機器人 + LLM ≠ 具身智能?

機器之心PRO · 會員通訊 Week 36
---- 本週為您解讀 ⑤個值得細品的 AI & Robotics 業內要事 ----
1. 機器人 LLM ≠ 具身智能?
通用人形機器人 LLM技術路線的下一程是什麼?通用機器人 LLM 通往具身智慧有哪幾大技術挑戰?在LLM爆火前,波士頓動力是怎麼做機器人的?場景理解(Scene Understanding)和人機協作技術的突破將帶來哪些機會? ...
2. Llama 2 的開源生態,是派還是陷阱?
Llama 2 帶來的開源生態可靠嗎? Baichuan-2 有望成為 Llama 2 的國產平替嗎?開源LLM訓練切片的意義何在?開源與閉源,國內大模型領域競爭格局是什麼樣的? Llama 2 的開源生態是否可靠? Baichuan-2 能否成為 Llama 2 的國產替代品?開源LLM訓練切片的意義是什麼?國內大模型領域的開源與封閉源競爭格局如何?
3. RLAIF是一個可靠的替代方案嗎?用人工智慧(AI)取代人類(H)?
RLAIF 是如何實現的? AI 標註如何增強 RL? RALIF 的優勢在哪?基於 RLAIF 訓練的LLM表現如何? RLAIF 取代 RLHF 這事可行嗎?未來還會需要 RLHF 嗎?谷歌近期還有哪些關於 RL 研究? ...
4. OpenAI 被爆秘密訓練 GPT-5
#GPT-5 有有八卦了? GPT-5 的功能傳成了什麼樣子? GPT-5 真的存在嗎? Sam Altman 之前說沒搞 GPT-5? ...
5. AI 接管翻譯工作花了好幾年?
西文網站編輯老師為何全部被「裁」?用 AI 翻譯網站可靠嗎?從谷歌開始的 AI 翻譯發展史了解?你記得十年前的 AI 翻譯什麼嗎?現在的 AI 翻譯又要往哪裡發展? 為什麼西文網站的編輯老師都被解雇了?使用人工智慧翻譯網站可靠嗎?讓我們來了解一下從谷歌開始的人工智慧翻譯的發展歷程。你還記得十年前的人工智慧翻譯是什麼樣子的嗎?現在的人工智慧翻譯將朝哪個方向發展呢?
本期完整版通訊包含5個專題解讀和29個AI和機器人賽道的要事速遞。其中,有9個技術方面的要點,11個國內方面的要點,以及9個國外方面的要點
本通訊總計 24646 字,可免費試讀至 7 %
只要消耗99個微信豆即可兌換完整本期解讀,相當於人民幣9.9元
要事解讀 ①機器人 LLM ≠ 具身智能?
時間:9 月 6 日
事件:稚汙君近期於訪談中透露其創業團隊的通用人形機器人 LLM 發展計劃,包含建立資料中心和對硬體結構進行迭代重構。
稚暉君對通用人形機器人和LLM技術路線的下一步有何想法?
1、稚暉君於訪談中表示,在 LLM 通用人形機器人這條具身智慧科技路線中,核心門檻在於數據。智元機器人近期的工作重點之一是建立自己的資料中心。
稚暉君總結了他的資料工作將涉及「監督學習資料」、「模擬資料」和「AIGC產生資料」
稚暉君表示,接下來的計畫是在幾個月內將臨港落地,建立場景和模擬平台,用於填補運動數據,以增強機器人的泛化能力
2、智元機器人的另一個工作重點是以增強機器人的運動性能目標,對硬體結構進行迭代重構。
智元機器人目前表示,人形機器人的價格將控制在20萬元以下
稚暉先生表示,如果無法達到20萬元的價格,人形機器人將無法實現商業化落地
② 20 萬元的估價可對比機器人取代新能源汽車製造業部分工人崗位所需的 1-2 年投資回報期。
4、智元機器人團隊為量產控製成本的方法涉及兩方面:
採用自研路線,例如自研關節馬達和靈巧手等核心零件,可以使成本減半
透過使用軟體和演算法來滿足精度要求,從而降低硬體成本
稚暉君表示,他們的首要目標是在工業製造領域實現商業化落地,併計劃在明年下半年實現這一目標
6、稚暉君也提到公司商業化的一條隱線,即:在走向通用人形機器人的終極目標的途中「沿途下蛋」。
① 通用人形機器人牽涉到最全面的機器人技術堆疊,其實現過程涉及多種尖端技術的研發和優化,可以催生多種專用形態的創新機器人產品。
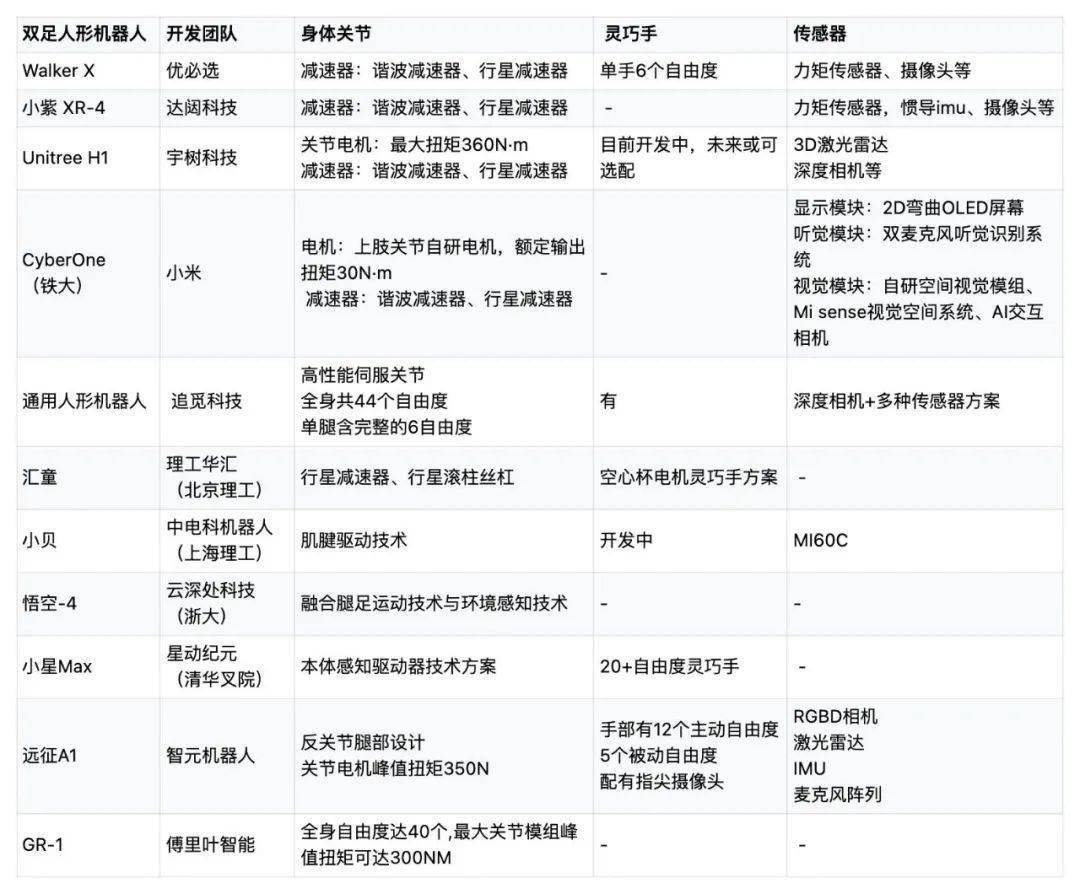
國內除了智元機器人的遠徵A1,還有哪些團隊在研發通用人形機器人? [6] [7]
通用機器人和LLM是否等同於具身智能呢? [2] [3] [26]
#圖靈獎得主、中國科學院院士、清華大學交叉資訊研究院院長姚期智在2023世界機器人大會中表示:未來的AGI需要有具身的實體,同真實的物理世界相交互來完成各種任務,這樣才能為產業帶來真正更大的價值。同時,姚期智指出,具身機器人目前遇到的主要有四大挑戰:
1、機器人無法像大語言模型一樣有一個基礎大模型直接一步到位,做到最底層的控制。
2、計算能力的挑戰。即使Google研發的Robotics Transformer模型,要實現機器人控制,仍需要進行許多改進
3、如何把機器人多模態的感官感知全部融合起來,仍面臨許多難題需要解決。
機器人的發展需要大量的資料收集,同時也面臨許多安全和隱私等問題
在 LLM 爆紅之前,波士頓動力是怎麼做機器人的?
2021年,波士頓動力的高級機器人工程師和Atlas感知軟體開發負責人Pat Marion發表了一篇文章,對Atlas跑酷背後的技術進行了解讀。 [4]
Atlas實現卓越的跑酷能力主要涉及三個方面的技術:跑酷認知能力、Atlas行為庫和模型預測控制
2、跑酷認知能力:包括使用先進的深度相機、感知演算法和進階地圖等組件
① Atlas 使用 TOF 深度相機以每秒 15 幀的速度產生環境的點雲,點雲是測距的大規模集合。
② TOF(Time of flight)直譯為「飛行時間」。其測距原理是透過給目標連續發送光脈衝,然後用感測器接收從物體返回的光,透過偵測光脈衝的飛行(往返)時間來得到目標物距離。
以上是機器人 + LLM ≠ 具身智能?的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)








 Elon Musk&Sam Altman衝突超過5000億美元的星際之門項目
Mar 08, 2025 am 11:15 AM
Elon Musk&Sam Altman衝突超過5000億美元的星際之門項目
Mar 08, 2025 am 11:15 AM
Elon Musk&Sam Altman衝突超過5000億美元的星際之門項目

