
據了解,W1基於逐際動力「運動智慧Motion Intelligence」研發,將腿式與輪式結構結合,搭載了自研的高性能關節,具備即時地形感知與全地形移動能力,在效率上比單純的足式機器人更有效率,適用場景也更加豐富複雜。
具體來說,W1已經在多個複雜的應用場景中成功通過能力驗證:
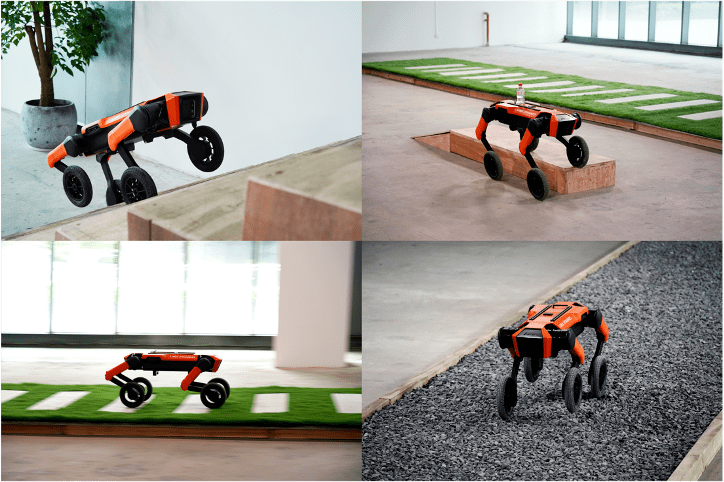
上下樓梯:融合感知的運動控制,實現了輪足穩定踏步上下樓梯;
上下斜坡:身體與斜坡面、地面皆可保持水平,按需靈活切換;
馬路牙子:能夠靈活自在地切換運動步態,輕鬆應對各種不同離散地形的挑戰
伏地穿越:在高速運動過程中,自由調整身體高度,適應不同作業環境的需求;
草地石板路:當車輛行駛在顛簸的路面上時,腿部的多關節會迅速協同響應,以減少車身的姿態波動
......
逐際動力創辦人張巍表示,四輪足機器人需要具備幾乎四足機器人所有的能力,但是輪足混合帶來的感知幹擾、狀態估計和運動控制的挑戰卻成數倍增加,難度極大,並且市面上也沒有成熟的解決方案。
因此逐際動力選擇自研方案,將感知能力與運動控制結合,利用在地形感知、強化學習、多剛體動力學、混雜動力學、模型預測控制等領域的學術和研發經驗,建立領感知與控制融合的演算法框架,實現更高穩定性、更強即時性的控制能力。
張巍認為,通用足式機器人目前正處於技術爆發期,基礎研究和商業化的交會點已經出現,並且不斷擴大。逐際動力的目標是開發具備全地形移動能力的高效率通用底盤,W1就是他們的首款產品
在未來,逐屆動力將透過技術研發與創新來解決更多足式機器人落地的難題,推動足式機器人進入產業領域,並創造價值
以上是逐際動力發表首款「通用底盤」四輪足機器人W1的詳細內容。更多資訊請關注PHP中文網其他相關文章!






















