
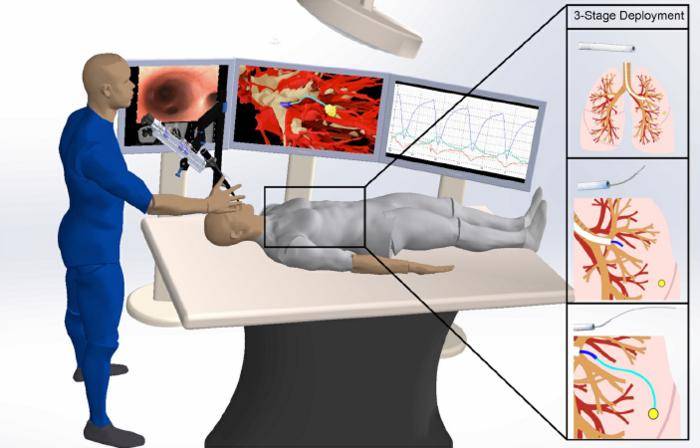
半自主醫療機器人肺部的3個階段。圖片來源:KUNTZ等/北卡羅來納大學
有些腫瘤非常小,隱藏在肺組織深處,醫生很難觸及它們。為應對這項挑戰,美國北卡羅來納大學教堂山分校和范德比爾特大學研究人員一直在研究一種能穿越肺組織的極其柔韌但堅固的機器人。他們在《科學·機器人》雜誌上最新發表的一篇論文中,展現了新機器人可自主地從“A點”出發到達“B點”,同時避開活體實驗室模型中的重要結構,例如微小氣道和血管。
研究人員指出,這項技術能夠實現機器人支氣管鏡無法達到的目標。它可以提供額外的幾厘米甚至幾毫米的距離,對於追蹤肺部的小目標非常有幫助
該機器人由幾個獨立的組件組成。機械控制組件的原理是利用一種針,針向前和向後提供受控推力,並且針設計允許沿著彎曲路徑轉向。該針由鎳鈦合金製成,經過雷射蝕刻以增加其靈活性,使其輕鬆穿過組織。
當它向前移動時,針上的蝕刻使其能夠輕鬆繞過障礙物。導管等其他配件可與針一起使用來執行肺部活檢等程序。
為了穿過組織,針需要知道它要去哪裡。研究團隊利用受試者胸腔的CT掃描和人工智慧創建了肺部的三維模型,包括氣道、血管和選定的目標。使用這個3D模型,一旦針向標靶出發,人工智慧驅動軟體就會指示它自動從“A點”移動到“B點”,同時避開重要的結構。
研究人員稱,它類似於自動駕駛汽車,但它可透過肺組織進行導航,在到達目的地時避開重要血管等障礙物。
需要進行改寫的內容是:總編輯的選擇與修改
當談論在人體內工作的機器人時,人們總希望它小巧、靈活、智能、柔韌並且堅固,希望這種機器人能輔助人類的雙手和雙眼,去往人類雙手難以抵達之處,看清人類雙眼無法分辨的病灶。這次,誕生了一種全新的機器人。它不僅能夠到達設定的目的地,還能靈活地避開一些微小但重要的結構。要知道,人體器官如此複雜,在通往目標的道路上存在著許多需要繞過的細小障礙。研究人員必須在結構、材料和機器人運動模式上下功夫,使其能夠自如地前進和後退,順利地進行疾病治療和救治工作
(資料來源:科技日報)
以上是機器人實現活體肺組織內的'半自主導航”,同時避開微小氣道和血管等關鍵結構的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















