

遙遙領先! BEVHeight++:針對路側視覺3D目標偵測新方案!

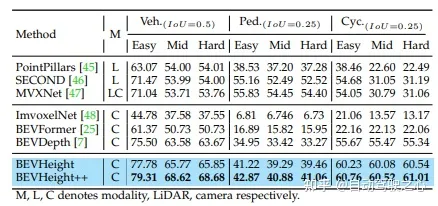
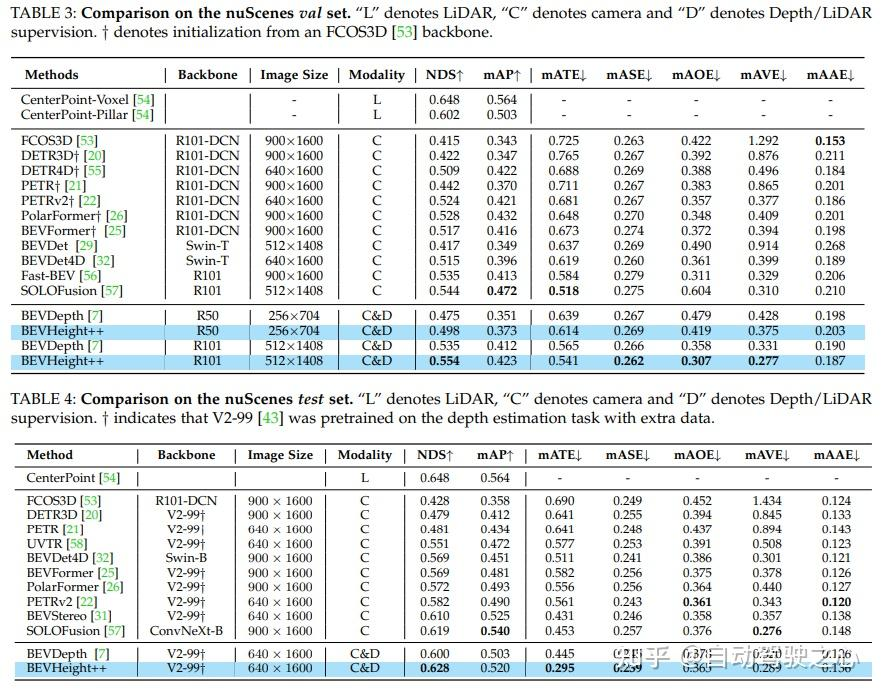
回归到地面的高度,以实现距离不可知的公式,从而简化仅相机感知方法的优化过程。在路侧camera的3D检测基准上,方法大大超过了以前所有以视觉为中心的方法。它比BEVDepth产生了 1.9%的NDS和 1.1%的mAP的显著改善。在nuScenes测试集上,方法取得了实质性的进步,NDS和mAP分别增加了 2.8%和 1.7%。
标题:BEVHeight :朝着稳健的视觉中心化3D物体检测迈进
论文链接:https://arxiv.org/pdf/2309.16179.pdf
作者单位:清华大学、中山大学、菜鸟网络、北京大学
出自国内首个自动驾驶社区:终于完成了20 技术方向学习路线的搭建(BEV感知/3D检测/多传感器融合/SLAM与规划等)
尽管最近的自动驾驶系统专注于开发车辆传感器的感知方法,但人们往往忽视了一种利用智能路边摄像头将感知能力扩展到视觉范围之外的替代方法。作者发现,最先进的以视觉为中心的BEV检测方法在路边摄像头上的性能较差。这是因为这些方法主要集中在恢复关于相机中心的深度,在相机中心,汽车和地面之间的深度差随着距离的增加而迅速缩小。在本文中,作者提出了一种简单而有效的方法,称为BEVHeight ,来解决这个问题。本质上,作者回归到地面的高度,以实现距离不可知的公式,从而简化仅相机感知方法的优化过程。通过结合高度和深度编码技术,实现了从2D到BEV空间的更准确和稳健的投影。在路边摄像头的流行3D检测基准上,方法大大超过了以前所有以视觉为中心的方法。就自车辆场景而言,BEVHeight 具有优于仅深度的方法
具体而言,在nuScenes验证集上进行评估时,它比BEVDepth产生了 1.9%的NDS和 1.1%的mAP的显著改善。此外,在nuScenes测试集上,方法取得了实质性的进步,NDS和mAP分别增加了 2.8%和 1.7%。
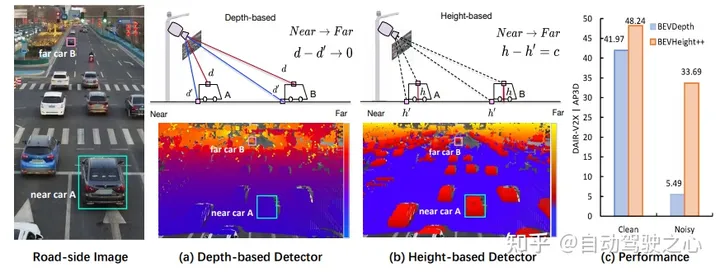
图1:(a)为了从单目图像中产生3D边界框,最先进的方法首先显式或隐式地预测每像素深度,以确定前景对象与背景的3D位置。然而,当我们在图像上绘制每像素深度时,我们注意到,当汽车远离相机时,车顶和周围地面上的点之间的差异会迅速缩小,这使得优化变得次优,尤其是对于远处的物体。(b) 相反,我们绘制了到地面的每像素高度,并观察到无论距离如何,这种差异都是不可知的,并且在视觉上更适合网络检测目标。然而,不能仅通过预测高度来直接回归3D位置。(c) 为此,我们提出了一个新的框架BEVHeight 来解决这个问题。经验结果表明,我们的方法在干净设置上超过了最佳方法5.49%,在嘈杂设置上超过28.2%。
网络结构
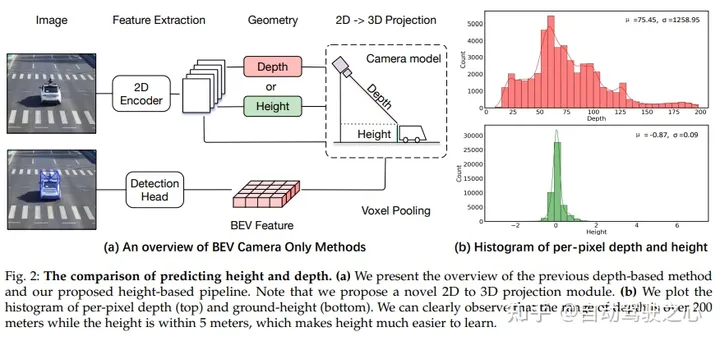
预测高度和深度的比较。(a) 概述了以前基于深度的方法和我们提出的基于高度的管道。请注意,本文提出了一种新颖的2D到3D投影模块。(b) 绘制每像素深度(顶部)和地面高度(底部)的直方图,可以清楚地观察到,深度范围超过200米,而高度在5米以内,这使得高度更容易学习。
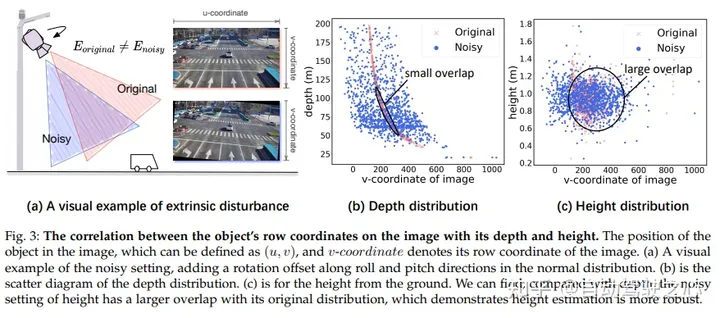
在图像中,目标的行坐标与其深度和高度之间存在相关性。目标在图像中的位置可以用(u,v)来定义,其中v表示图像的行坐标。在(a)中,我们展示了一个视觉示例,通过在正态分布中添加滚转和俯仰方向的旋转偏移来引入噪声。在(b)中,我们展示了深度分布的散点图。在(c)中,我们展示了离地高度。我们可以观察到,与深度相比,高度的噪声设置与其原始分布有更大的重叠,这表明高度估计更具鲁棒性
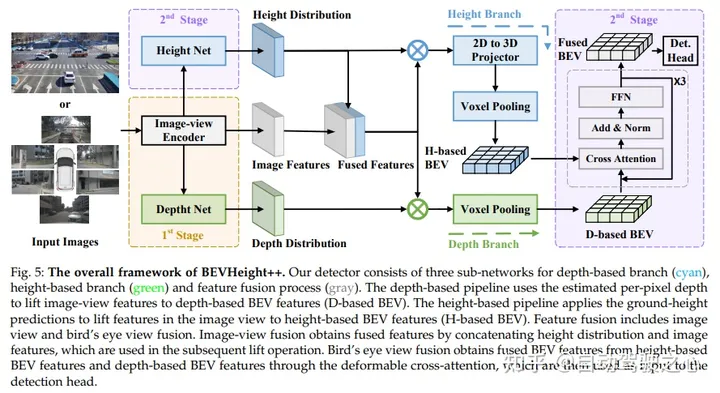
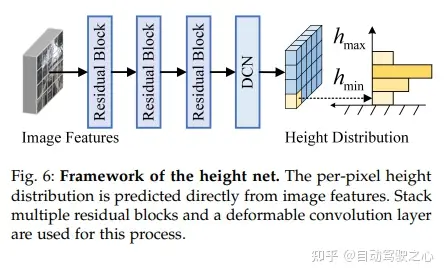
BEVHeight 的整體框架包含三個子網絡,分別是基於深度的分支(青色)、基於高度的分支(綠色)和特徵融合過程(灰色)。基於深度的pipeline使用估計的每像素深度將影像視圖特徵轉換為基於深度的BEV特徵(基於D的BEV)。基於高度的pipeline利用對影像視圖中升力特徵的地面高度預測,產生基於高度的BEV特徵(基於H的BEV)。特徵融合包括影像融合和鳥瞰融合。影像-視圖融合透過級聯高度分佈和影像特徵,得到融合特徵,用於後續的提升操作。鳥瞰圖融合透過可變形交叉注意力從基於高度的BEV特徵和基於深度的BEV特性中獲得融合的BEV特點,然後將其作為檢測頭的輸入
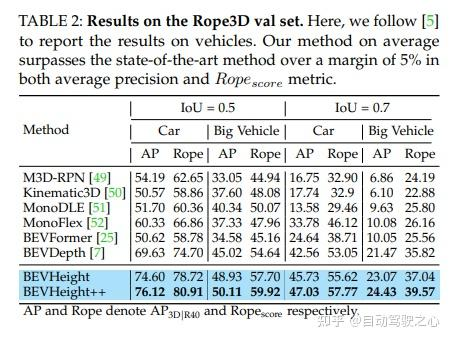
##實驗結果

以上是遙遙領先! BEVHeight++:針對路側視覺3D目標偵測新方案!的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 CUDA之通用矩陣乘法:從入門到熟練!
Mar 25, 2024 pm 12:30 PM
CUDA之通用矩陣乘法:從入門到熟練!
Mar 25, 2024 pm 12:30 PM
通用矩陣乘法(GeneralMatrixMultiplication,GEMM)是許多應用程式和演算法中至關重要的一部分,也是評估電腦硬體效能的重要指標之一。透過深入研究和優化GEMM的實現,可以幫助我們更好地理解高效能運算以及軟硬體系統之間的關係。在電腦科學中,對GEMM進行有效的最佳化可以提高運算速度並節省資源,這對於提高電腦系統的整體效能至關重要。深入了解GEMM的工作原理和最佳化方法,有助於我們更好地利用現代計算硬體的潛力,並為各種複雜計算任務提供更有效率的解決方案。透過對GEMM性能的優
 华为乾崑 ADS3.0 智驾系统 8 月上市 享界 S9 首发搭载
Jul 30, 2024 pm 02:17 PM
华为乾崑 ADS3.0 智驾系统 8 月上市 享界 S9 首发搭载
Jul 30, 2024 pm 02:17 PM
7月29日,在AITO问界第四十万台新车下线仪式上,华为常务董事、终端BG董事长、智能汽车解决方案BU董事长余承东出席发表演讲并宣布,问界系列车型将于今年8月迎来华为乾崑ADS3.0版本的上市,并计划在8月至9月间陆续推送升级。8月6日即将发布的享界S9将首发华为ADS3.0智能驾驶系统。华为乾崑ADS3.0版本在激光雷达的辅助下,将大幅提升智驾能力,具备融合端到端的能力,并采用GOD(通用障碍物识别)/PDP(预测决策规控)全新端到端架构,提供车位到车位智驾领航NCA功能,并升级CAS3.0全
 自動駕駛場景中的長尾問題怎麼解決?
Jun 02, 2024 pm 02:44 PM
自動駕駛場景中的長尾問題怎麼解決?
Jun 02, 2024 pm 02:44 PM
昨天面試被問到了是否做過長尾相關的問題,所以就想著簡單總結一下。自動駕駛長尾問題是指自動駕駛汽車中的邊緣情況,即發生機率較低的可能場景。感知的長尾問題是目前限制單車智慧自動駕駛車輛運行設計域的主要原因之一。自動駕駛的底層架構和大部分技術問題已經解決,剩下的5%的長尾問題,逐漸成了限制自動駕駛發展的關鍵。這些問題包括各種零碎的場景、極端的情況和無法預測的人類行為。自動駕駛中的邊緣場景"長尾"是指自動駕駛汽車(AV)中的邊緣情況,邊緣情況是發生機率較低的可能場景。這些罕見的事件
 SIMPL:用於自動駕駛的簡單高效的多智能體運動預測基準
Feb 20, 2024 am 11:48 AM
SIMPL:用於自動駕駛的簡單高效的多智能體運動預測基準
Feb 20, 2024 am 11:48 AM
原文標題:SIMPL:ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving論文連結:https://arxiv.org/pdf/2402.02519.pdf程式碼連結:https://github.com/HKUST-Aerial-Robotics/SIMPLobotics單位論文想法:本文提出了一種用於自動駕駛車輛的簡單且有效率的運動預測基線(SIMPL)。與傳統的以代理為中心(agent-cent
 FisheyeDetNet:首個以魚眼相機為基礎的目標偵測演算法
Apr 26, 2024 am 11:37 AM
FisheyeDetNet:首個以魚眼相機為基礎的目標偵測演算法
Apr 26, 2024 am 11:37 AM
目標偵測在自動駕駛系統當中是一個比較成熟的問題,其中行人偵測是最早得以部署演算法之一。在多數論文當中已經進行了非常全面的研究。然而,利用魚眼相機進行環視的距離感知相對來說研究較少。由於徑向畸變大,標準的邊界框表示在魚眼相機當中很難實施。為了緩解上述描述,我們探索了擴展邊界框、橢圓、通用多邊形設計為極座標/角度表示,並定義一個實例分割mIOU度量來分析這些表示。所提出的具有多邊形形狀的模型fisheyeDetNet優於其他模型,並同時在用於自動駕駛的Valeo魚眼相機資料集上實現了49.5%的mAP
 自動駕駛與軌跡預測看這篇就夠了!
Feb 28, 2024 pm 07:20 PM
自動駕駛與軌跡預測看這篇就夠了!
Feb 28, 2024 pm 07:20 PM
軌跡預測在自動駕駛中承擔著重要的角色,自動駕駛軌跡預測是指透過分析車輛行駛過程中的各種數據,預測車輛未來的行駛軌跡。作為自動駕駛的核心模組,軌跡預測的品質對於下游的規劃控制至關重要。軌跡預測任務技術堆疊豐富,需熟悉自動駕駛動/靜態感知、高精地圖、車道線、神經網路架構(CNN&GNN&Transformer)技能等,入門難度很高!許多粉絲期望能夠盡快上手軌跡預測,少踩坑,今天就為大家盤點下軌跡預測常見的一些問題和入門學習方法!入門相關知識1.預習的論文有沒有切入順序? A:先看survey,p
 聊聊端到端與下一代自動駕駛系統,以及端到端自動駕駛的一些迷思?
Apr 15, 2024 pm 04:13 PM
聊聊端到端與下一代自動駕駛系統,以及端到端自動駕駛的一些迷思?
Apr 15, 2024 pm 04:13 PM
最近一個月由於眾所周知的一些原因,非常密集地和業界的各種老師同學進行了交流。交流中必不可免的一個話題自然是端到端與火辣的特斯拉FSDV12。想藉此機會,整理當下這個時刻的一些想法和觀點,供大家參考和討論。如何定義端到端的自動駕駛系統,應該期望端到端解決什麼問題?依照最傳統的定義,端到端的系統指的是一套系統,輸入感測器的原始訊息,直接輸出任務關心的變數。例如,在影像辨識中,CNN相對於傳統的特徵提取器+分類器的方法就可以稱之為端到端。在自動駕駛任務中,輸入各種感測器的資料(相機/LiDAR
 蘋果16系統哪個版本最好
Mar 08, 2024 pm 05:16 PM
蘋果16系統哪個版本最好
Mar 08, 2024 pm 05:16 PM
蘋果16系統中版本最好的是iOS16.1.4,iOS16系統的最佳版本可能因人而異添加和日常使用體驗的提升也受到了很多用戶的好評。蘋果16系統哪個版本最好答:iOS16.1.4iOS16系統的最佳版本可能因人而異。根據公開的消息,2022年推出的iOS16被認為是一個非常穩定且性能優越的版本,用戶對其整體體驗也相當滿意。此外,iOS16中新功能的新增和日常使用體驗的提升也受到了許多用戶的好評。特別是在更新後的電池續航力、訊號表現和發熱控制方面,使用者的回饋都比較正面。然而,考慮到iPhone14
