
機器人已經被廣泛應用於外帶、快遞、機場引導、建築工程檢查等多個領域。然而,其中一個困難是在人群中間移動
目前機器人主要依賴攝影機和其它感測器觀察周圍環境,但這種方案並不穩定,而且周圍人群會動態調整方向,因此機器人很難在人群場景下應用。
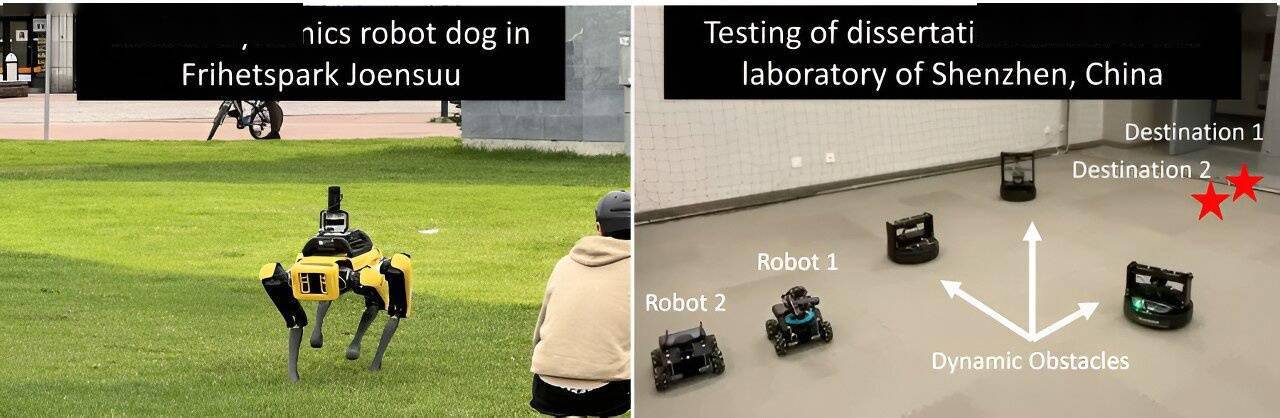
在最新的論文中,理學碩士周成民提出了一種強化學習演算法(RL),用於引導機器人在人群中移動
這是一種無模型強化學習演算法,它使機器人能夠從歷史經驗中學習,經過訓練或學習,機器人即使在充滿挑戰的情況下也能穿行。
IT之家註:這種方式也存在諸多挑戰,例如學習效果慢,無法高效分析感測器訊息,導致無法有效應對複雜人群場景等。
以上是機器人在人群中穿梭的新演算法問世的詳細內容。更多資訊請關注PHP中文網其他相關文章!






















