
Nat. Commun.: 機器人模仿蝌蚪進化獲得新技能!
一個小蝌蚪只能在水裡遊,但是當它變成青蛙之後就可以擁有水陸兩棲能力。同樣的一個機器人,由於自己身體形狀的限制,不可能擅長很多運動。但是機器人可以透過變形來獲取新技能。
傳統變形機器人的弊端
然而,傳統的形變機器人一直依賴笨重的外部設備,如大型馬達和傳動機構,從而限制了它們的靈活性和多功能性。這與自然界的動物有著明顯的不同,動物是透過肌肉來實現驅動,並且擁有豐富的感知和控制能力。
近期,耶魯大學和科羅拉多州立大學的研究人員在世界著名期刊《自然-通訊》上發表一項創新性的研究,該研究徹底改變了傳統機器人變形的方式。研究人員成功地將驅動、感知和鎖定功能直接嵌入機器人的內部結構,消除了外部硬體的笨重需求。
原理
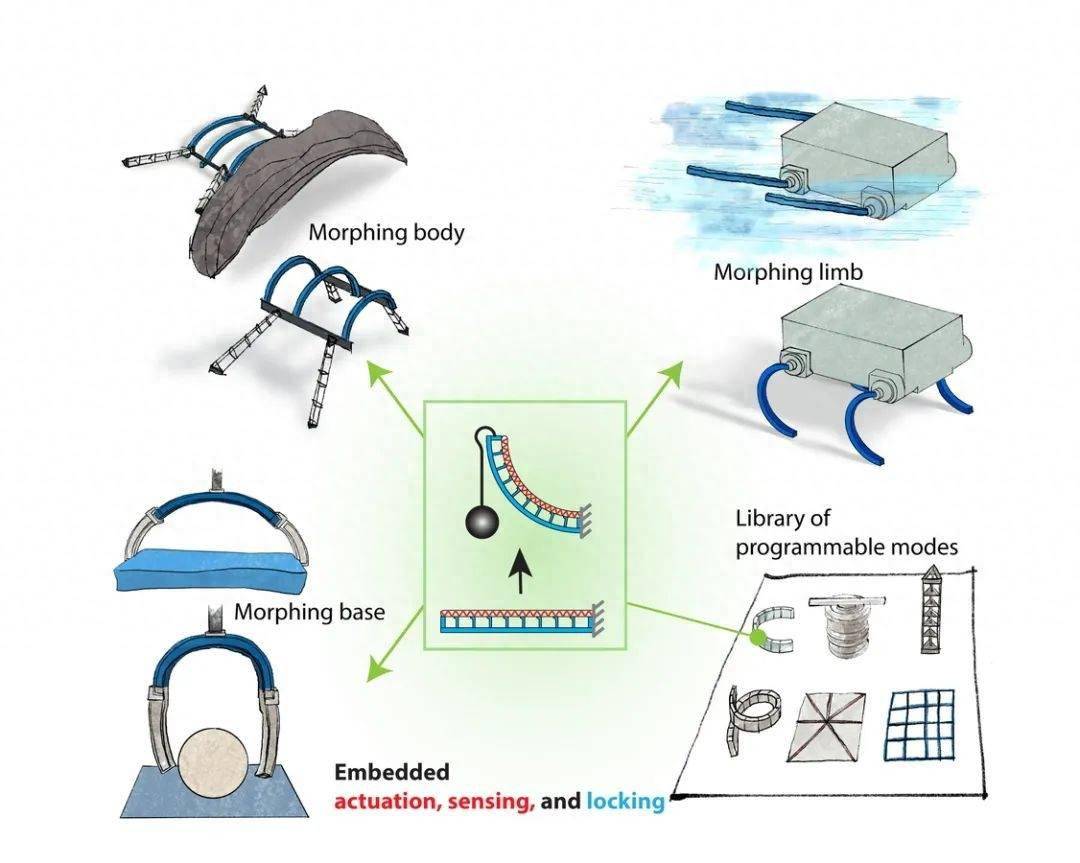
這項創新技術的核心在於將輕量級人工肌肉與形狀記憶聚合物(SMP)結合。人工肌肉可以在電流作用下產生收縮,,而SMP則可以在剛性和柔軟狀態之間切換,以鎖定機器人的形狀。這種方法的獨特之處在於,它將所有這些功能完全嵌入機器人的體內,而無需複雜的機械結構和傳動裝置。
像人一樣,這種機器人也可以能夠感知自身的形狀變化,達到精確的控制。

應用程式
這項嵌入式變形技術具有廣泛的實際應用前景,並且具有徹底革命性的意義。研究團隊已經展示了該技術在各種機器人系統中的多功能性。例如,我們展示了一種夾爪,它可以根據物體大小來調節自身的骨架大小。這樣一來,大的夾爪就可以夾住小的形狀,而小的夾爪也可以夾住大的形狀
自感知的形態變化夾爪能夠自適應不同的抓取任務,四足機器人可以根據地面狀況調整身體形態。例如,可以使用爬行的方式通過一個小的縫隙,然後改變身體形狀,站起來,從而能夠走得更快。當需要通過一個較小的橋時,可以抱著橋爬過去

機器人可以在需要時改變肢體形狀以適應不同的環境和任務。比如說一個機器人的腿從直的變成彎曲的,就可以爬上岸移動,
當腳從彎曲變成直的時候,就可以重新回到水中游泳

重寫內容為:無限的潛能
在這項研究中,最引人注目的成果之一是建立了一組嵌入式變形模組庫,這些庫可以實現可編程的形狀變化,包括扭曲、三維彎曲和表面變形。這個庫展示了嵌入式方法使機器人能夠應對各種挑戰
這項突破性研究的影響將是深遠的。嵌入式形態變化不僅增強了機器人與周圍環境的互動能力,也為搜尋救援、探索、醫療保健和工業自動化等領域的應用帶來了新的可能性。機器人能夠無縫切換不同形態和功能,這為機器人領域帶來了前所未有的多功能性
請點擊以下連結查看論文:
需要重寫的內容是:https://www.nature.com/articles/s41467-023-41708-6
以上是Nat. Commun.: 機器人模仿蝌蚪進化獲得新技能!的詳細內容。更多資訊請關注PHP中文網其他相關文章!






















