

華人團隊斬獲最佳論文、最佳系統論文獎項,CoRL研究成果獲獎公佈

自2017年首次舉辦以來,CoRL已經成為了機器人學與機器學習交叉領域的全球頂級學術會議之一。 CoRL是機器人學習研究的單一主題會議,涵蓋了機器人學、機器學習和控制等多個主題,包括理論與應用
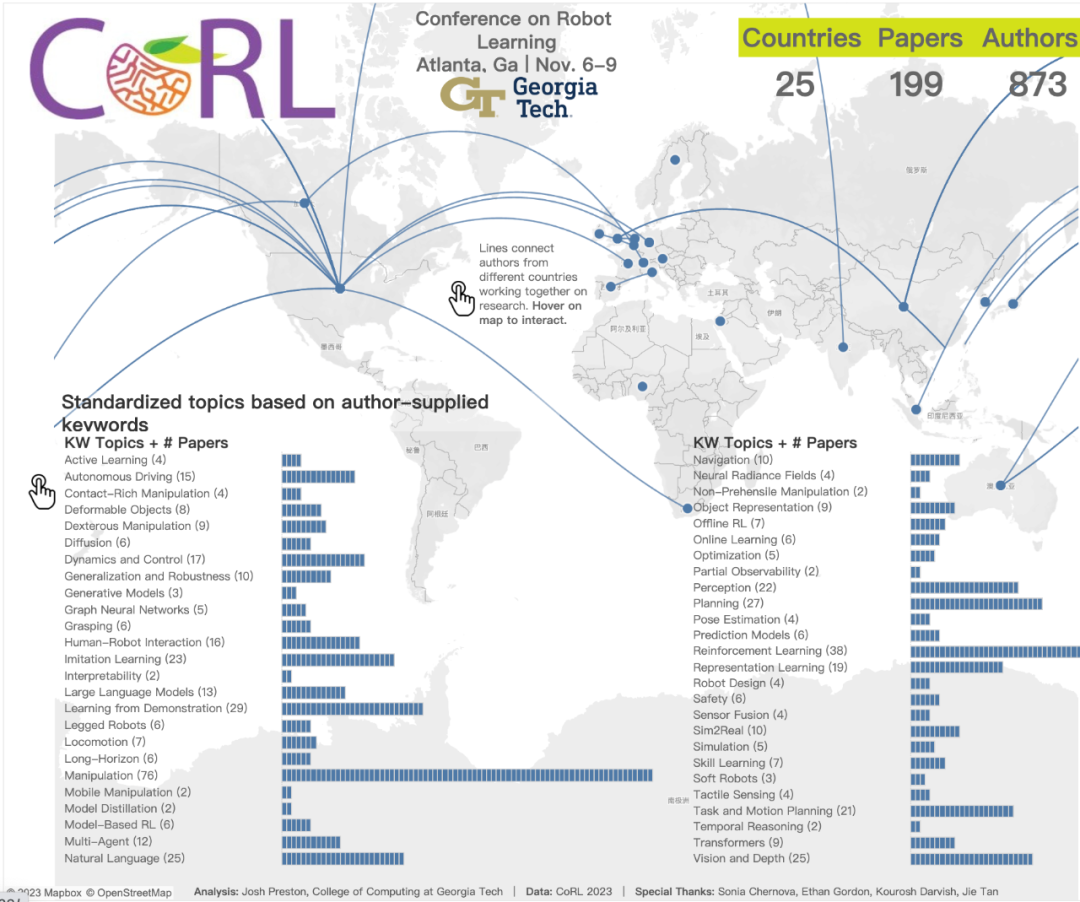
2023年的CoRL大會將於11月6日至9日在美國亞特蘭大舉行。根據官方數據透露,今年有來自25個國家的199篇論文入選CoRL。熱門主題包括操作、強化學習等。雖然相較於AAAI、CVPR等大型AI學術會議,CoRL的規模較小,但隨著今年大模型、具身智能、人形機器人等概念的熱度上升,值得關注的相關研究也會在CoRL會議上呈現
目前,CoRL 2023 官方已公佈最佳論文獎、最佳學生論文獎、最佳系統論文獎等獎項。接下來,我們將為大家介紹這些得獎論文。
最佳論文
- #論文:Distilled Feature Fields Enable Few-Shot Language- Guided Manipulation
- 作者:William Shen, Ge Yang, Alan Yu, Jensen Wong, Leslie Pack Kaelbling, Phillip Isola
- 代理商:MIT CSAIL 、IAIFI
- 論文網址:https://openreview.net/forum?id=Rb0nGIt_kh5
研究概述:目前,圖像模型中的自監督學習和語言監督學習已經融入了豐富的全球知識,這對於模型的泛化能力非常關鍵。然而,圖像特徵只包含了二維資訊。我們了解到,在機器人任務中,對於真實世界中三維物體的幾何形狀有所了解是非常重要的
透過使用蒸餾特徵場(Distilled Feature Field,DFF),該研究將精確的三維幾何圖形與來自二維基礎模型的豐富語義結合起來,以使機器人能夠利用二維基礎模型中豐富的視覺和語言先驗,從而完成基於語言指導的操作
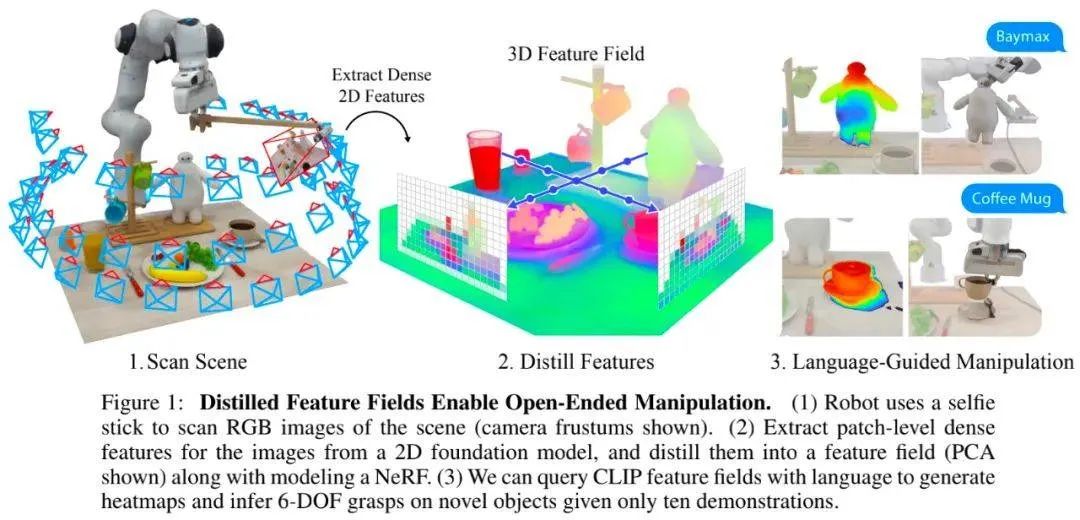
具體來說,研究提出了一種用於6-DOF 抓取和放置的小樣本學習方法,並利用強大的空間和語義先驗泛化到未見過物體上。使用從視覺- 語言模型CLIP 中提取的特徵,該研究提出了一種透過開放性的自然語言指令對新物體進行操作,並展示了這種方法泛化到未見過的表達和新型物體的能力。
這篇論文的兩位共同一作是CSAIL 「具身智慧」團隊的成員William Shen 和楊歌,其中楊歌是2023 年CSAIL 具身智慧研討會的共同籌辦人。
我了解到《機器之心》曾經詳細介紹過這項研究,請查閱《大模型加持的機器人有多強,MIT CSAIL&IAIFI 用自然語言指導機器人抓取物體》
最佳學生論文
- #論文:Robots That Ask For Help: Uncertainty Alignment for Large Language Model Planners
- 作者:Allen Z. Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu, Leila Takayama, Fei Xia, Jake Varley, Zhenjia Xu, Dorsa Sadigh, Andy Zeng, Anirudha Majumdar
- 機構:普林斯頓大學、Google DeepMind
- 論文地址:https://openreview.net/forum ?id=4ZK8ODNyFXx
大型語言模型(LLM)是一種具有廣泛應用前景的技術,在機器人領域尤其如此。然而,儘管LLM在逐步規劃和常識推理方面表現出了巨大的潛力,但它也存在一些幻覺問題
基於此,該研究提出了一種新框架—— KnowNo,用於度量和對齊基於LLM 的規劃器的不確定性。它能夠使 LLM 意識到哪些資訊是未知的,並在有需要時尋求協助。
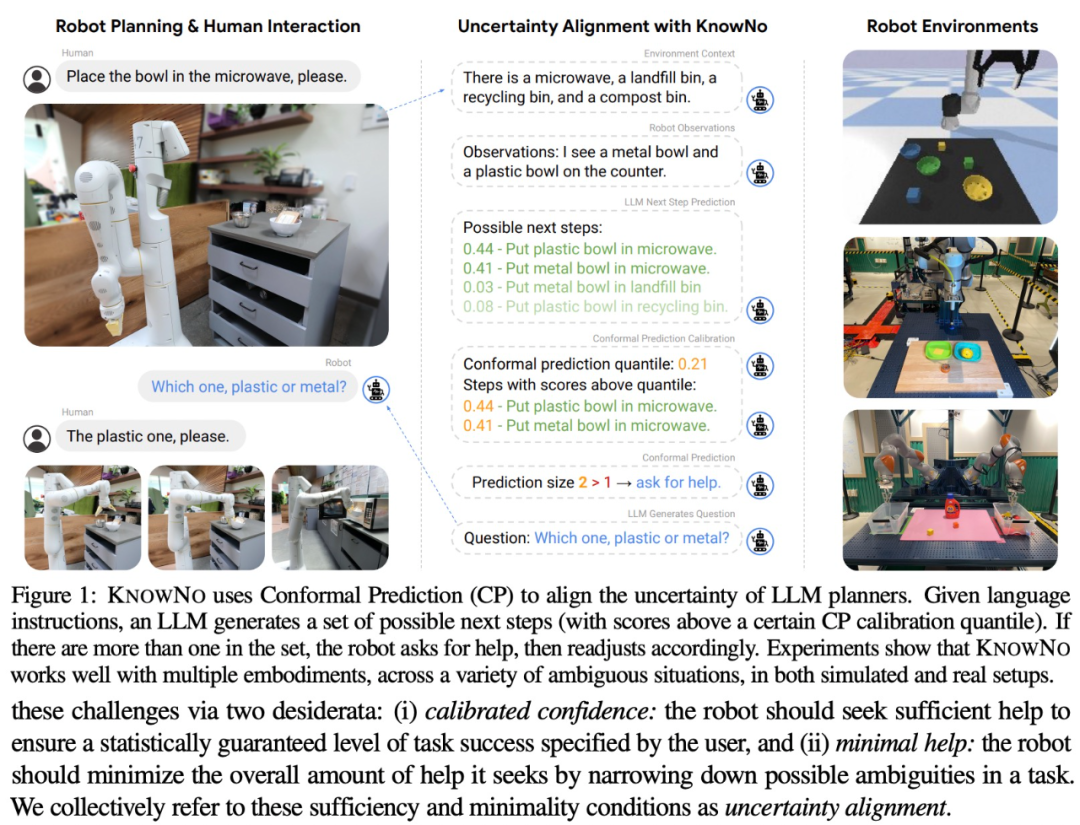
KnowNo是基於共形預測理論的,它提供了任務完成的統計保證,並能夠最大程度地減少多步驟規劃任務中的人工幹預
該研究在各種模擬和真實機器人實驗中,以各種模式的不確定任務(包括空間不確定性、數位不確定性等等)對KnowNo 進行了測試。實驗結果表明, KnowNo 在提高效率和自主性方面表現出色,優於基線,且安全可信。 KnowNo 能夠在不進行模型微調的情況下直接用於 LLM,為模型的不確定性提供了一種有效的輕量級解決方法,並能夠與基礎模型不斷增強的能力相輔相成。
最佳系統論文
- #論文:RoboCook: Long-Horizon Elasto-Plastic Object Manipulation with Diverse Tools
- 作者:Haochen Shi, Huazhe Xu, Samuel Clarke, Yunzhu Li, Jiajun Wu
- 機構:史丹佛大學、 UIUC
- 論文網址:https://openreview.net/forum?id=69y5fzvaAT
論文簡介:人類擅長製造和使用各種工具,但對於機器人而言,理解如何有效使用工具,並在相應的物體上完成操作仍然是一個很大的挑戰。該研究建構了一個名為RoboCook的智慧機器人系統,能夠透過各種工具感知、建模並操縱彈塑性物體(elasto-plastic object)
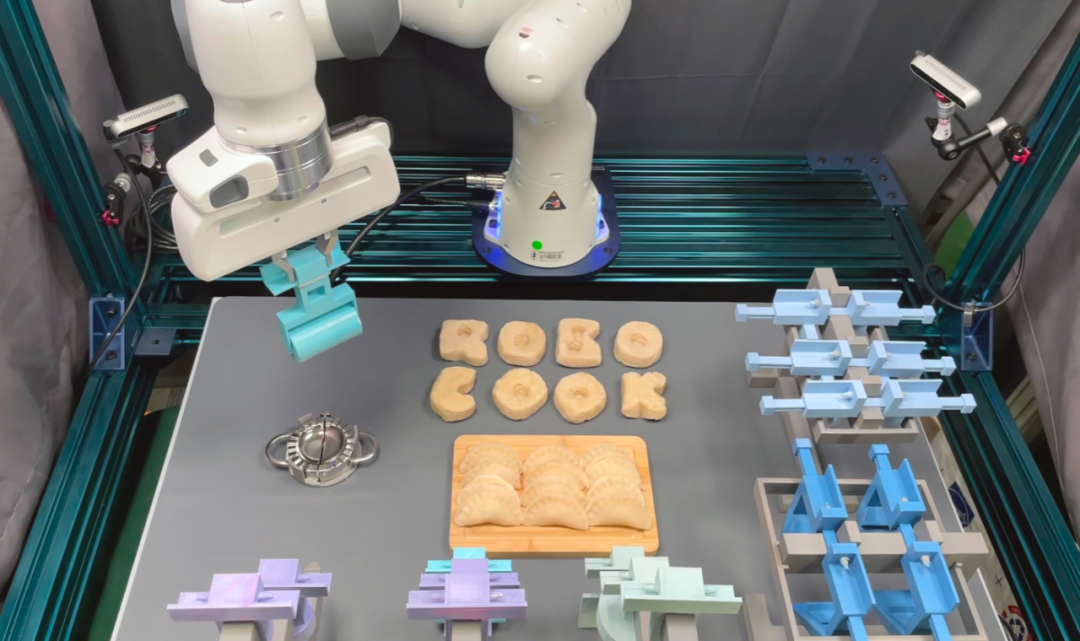
RoboCook 使用點雲場景表徵,利用圖神經網路(GNN)對工具與物體的相互作用進行建模,並將工具分類與自監督策略學習相結合,以製定操作計劃。
該研究表明,對於每個工具,僅需20 分鐘的現實世界互動數據,RoboCook 就能學會並操縱機械手臂完成一些複雜的、長時程的彈塑性物件操作任務,例如製作餃子、字母餅乾等。
根據實驗結果顯示,RoboCook 的性能明顯優於現有的SOTA 方法,且在面對嚴重的外部幹擾時仍能表現出穩定性,對不同材料的適應能力也更為出色
值得一提的是,這篇論文的共同一作分別是來自史丹佛大學的博士生Haochen Shi、原史丹佛大學博士後研究員、現清華大學交叉資訊科學研究所助理教授Huazhe Xu,論文作者之一為姚班校友、史丹佛大學助理教授吳佳俊。
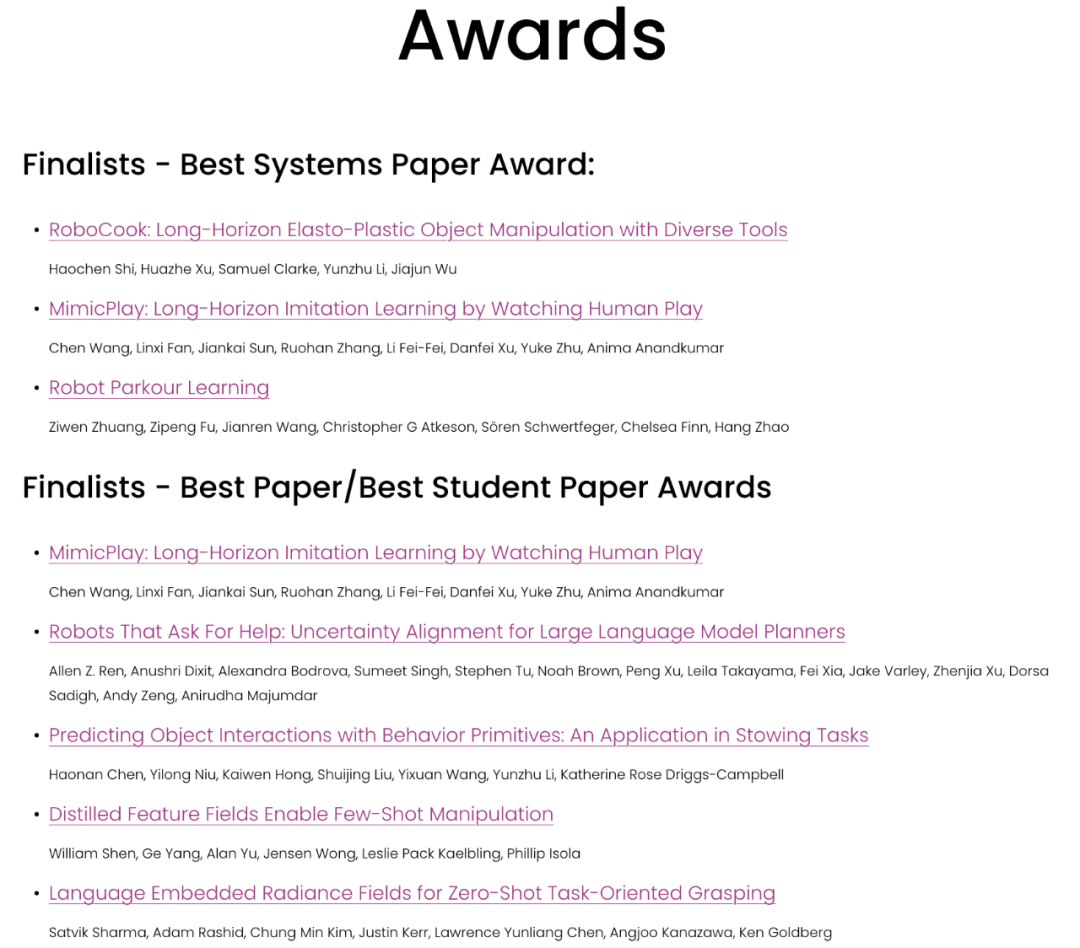
獲獎論文入圍名單已經公佈
#以上是華人團隊斬獲最佳論文、最佳系統論文獎項,CoRL研究成果獲獎公佈的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)
熱門話題



 centos關機命令行
Apr 14, 2025 pm 09:12 PM
centos關機命令行
Apr 14, 2025 pm 09:12 PM
CentOS 關機命令為 shutdown,語法為 shutdown [選項] 時間 [信息]。選項包括:-h 立即停止系統;-P 關機後關電源;-r 重新啟動;-t 等待時間。時間可指定為立即 (now)、分鐘數 ( minutes) 或特定時間 (hh:mm)。可添加信息在系統消息中顯示。
 如何檢查CentOS HDFS配置
Apr 14, 2025 pm 07:21 PM
如何檢查CentOS HDFS配置
Apr 14, 2025 pm 07:21 PM
檢查CentOS系統中HDFS配置的完整指南本文將指導您如何有效地檢查CentOS系統上HDFS的配置和運行狀態。以下步驟將幫助您全面了解HDFS的設置和運行情況。驗證Hadoop環境變量:首先,確認Hadoop環境變量已正確設置。在終端執行以下命令,驗證Hadoop是否已正確安裝並配置:hadoopversion檢查HDFS配置文件:HDFS的核心配置文件位於/etc/hadoop/conf/目錄下,其中core-site.xml和hdfs-site.xml至關重要。使用
 CentOS上GitLab的備份方法有哪些
Apr 14, 2025 pm 05:33 PM
CentOS上GitLab的備份方法有哪些
Apr 14, 2025 pm 05:33 PM
CentOS系統下GitLab的備份與恢復策略為了保障數據安全和可恢復性,CentOS上的GitLab提供了多種備份方法。本文將詳細介紹幾種常見的備份方法、配置參數以及恢復流程,幫助您建立完善的GitLab備份與恢復策略。一、手動備份利用gitlab-rakegitlab:backup:create命令即可執行手動備份。此命令會備份GitLab倉庫、數據庫、用戶、用戶組、密鑰和權限等關鍵信息。默認備份文件存儲於/var/opt/gitlab/backups目錄,您可通過修改/etc/gitlab
 CentOS上PyTorch的GPU支持情況如何
Apr 14, 2025 pm 06:48 PM
CentOS上PyTorch的GPU支持情況如何
Apr 14, 2025 pm 06:48 PM
在CentOS系統上啟用PyTorchGPU加速,需要安裝CUDA、cuDNN以及PyTorch的GPU版本。以下步驟將引導您完成這一過程:CUDA和cuDNN安裝確定CUDA版本兼容性:使用nvidia-smi命令查看您的NVIDIA顯卡支持的CUDA版本。例如,您的MX450顯卡可能支持CUDA11.1或更高版本。下載並安裝CUDAToolkit:訪問NVIDIACUDAToolkit官網,根據您顯卡支持的最高CUDA版本下載並安裝相應的版本。安裝cuDNN庫:前
 docker原理詳解
Apr 14, 2025 pm 11:57 PM
docker原理詳解
Apr 14, 2025 pm 11:57 PM
Docker利用Linux內核特性,提供高效、隔離的應用運行環境。其工作原理如下:1. 鏡像作為只讀模板,包含運行應用所需的一切;2. 聯合文件系統(UnionFS)層疊多個文件系統,只存儲差異部分,節省空間並加快速度;3. 守護進程管理鏡像和容器,客戶端用於交互;4. Namespaces和cgroups實現容器隔離和資源限制;5. 多種網絡模式支持容器互聯。理解這些核心概念,才能更好地利用Docker。
 centos安裝mysql
Apr 14, 2025 pm 08:09 PM
centos安裝mysql
Apr 14, 2025 pm 08:09 PM
在 CentOS 上安裝 MySQL 涉及以下步驟:添加合適的 MySQL yum 源。執行 yum install mysql-server 命令以安裝 MySQL 服務器。使用 mysql_secure_installation 命令進行安全設置,例如設置 root 用戶密碼。根據需要自定義 MySQL 配置文件。調整 MySQL 參數和優化數據庫以提升性能。
 CentOS下GitLab的日誌如何查看
Apr 14, 2025 pm 06:18 PM
CentOS下GitLab的日誌如何查看
Apr 14, 2025 pm 06:18 PM
CentOS系統下查看GitLab日誌的完整指南本文將指導您如何查看CentOS系統中GitLab的各種日誌,包括主要日誌、異常日誌以及其他相關日誌。請注意,日誌文件路徑可能因GitLab版本和安裝方式而異,若以下路徑不存在,請檢查GitLab安裝目錄及配置文件。一、查看GitLab主要日誌使用以下命令查看GitLabRails應用程序的主要日誌文件:命令:sudocat/var/log/gitlab/gitlab-rails/production.log此命令會顯示produc
 CentOS上PyTorch的分佈式訓練如何操作
Apr 14, 2025 pm 06:36 PM
CentOS上PyTorch的分佈式訓練如何操作
Apr 14, 2025 pm 06:36 PM
在CentOS系統上進行PyTorch分佈式訓練,需要按照以下步驟操作:PyTorch安裝:前提是CentOS系統已安裝Python和pip。根據您的CUDA版本,從PyTorch官網獲取合適的安裝命令。對於僅需CPU的訓練,可以使用以下命令:pipinstalltorchtorchvisiontorchaudio如需GPU支持,請確保已安裝對應版本的CUDA和cuDNN,並使用相應的PyTorch版本進行安裝。分佈式環境配置:分佈式訓練通常需要多台機器或單機多GPU。所
