

微軟專利為AR眼鏡臉部追蹤提出改善的感測器電容值測量

(映維網Nweon 2024年01月04日)頭戴式裝置可以包含用於追蹤臉部動作的臉部追蹤感應器。執行臉部追蹤的一種方法是使用臉部追蹤感測器陣列來測量電容值。當臉部肌肉移動時,臉部追蹤感應器的電容會根據臉部表面與對應感應器的接近程度而改變。
確定電容的一種可能方法是使用包含臉部追蹤感測器的感測電容的諧振LC電路。改變與感應電容的表面接近度可以導致諧振LC電路的諧振頻率發生可測量的變化。然而,陣列的臉部追蹤感測器之間可能發生電容串擾,這使得多個感測器同時執行電容測量變得複雜。
在名為「Determining charge on a facial-tracking sensor」的專利申請中,微軟介紹的方法主要透過確定儲存在感覺電容器的電極的電荷量來確定臉部追蹤感測器的感覺電容器的電容。
簡單地說,臉部追蹤感測器包括配置成定位於靠近臉部表面的感測電容器電極。所述感應電容器電極是基於所述感應電容器電極與所述表面之間的距離形成電容。控制器對臉部追蹤感測器的感應電容電極施加參考電壓。
然後,電荷感測電路透過確定由於施加參考電壓而在感測電容器電極上累積的電荷量來確定感測電容器電極上的電容。
在一個實施例中,控制器同時沿著電荷感測電路和臉部追蹤感測器之間的電氣連接將參考電壓應用於shielding track。 shielding track的參考電壓有助於減少臉部追蹤感測器接收到的電容串擾。
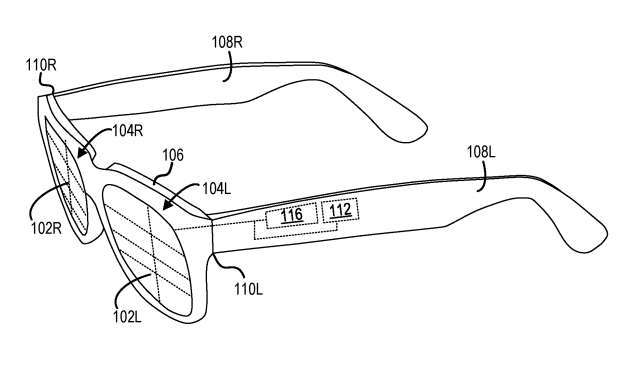
圖1顯示了包含多個臉部追蹤感測器的範例頭戴式裝置100。具體地說,頭戴式設備100包括形成在頭戴式設備100的左透鏡104L的左感電容電極陣列102L和形成在右透鏡104R的右感電容電極陣列102R。
左感電容器電極陣列102L和右感電容器電極陣列102R中的每一個包括多個感覺電容器電極,每個感覺電容器電極配置為感測佩戴者臉部的不同區域。每個感測電容器電極配置為定位於靠近人臉的表面,並基於感測電容器電極與人臉表面之間的距離形成電容。
感測電容器電極陣列102L、102R由至少部分光學透明的導電薄膜所形成。所述薄膜可包含一種或多種導電材料,如氧化銦錫、石墨烯或其他合適材料。薄膜可以透過任何合適的製程形成,例如化學氣相沉積。在感測電容器電極之間形成的溝槽可用於放置導電走線。由於導電膜不是完全光學透明,因此與相對較厚的塗層相比,使用相對較薄的薄膜用於感測電容器電極可以提供更大的透明度。
頭戴式設備100同時包含多個電荷感測電路,如圖112所示。多個電荷感測電路112中的每個電荷感測電路連接到相應的臉部追蹤感測器。每個電荷感測電路112配置為透過確定由於施加參考電壓而在相應的感測電容器電極上累積的電荷量來確定相應的感測電容器電極的電容。
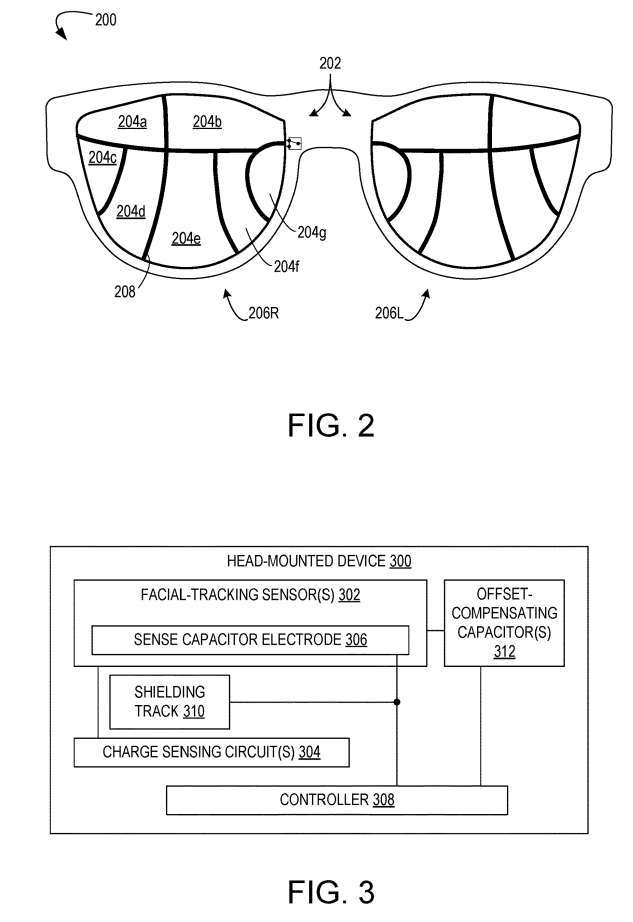
圖2顯示包含多個感測電容器電極的感測電容器電極陣列的範例佈局202。如圖所示,感測電容器電極204a-g由溝槽區域208隔開,以粗黑線表示。溝槽區208是缺乏形成感測電容器電極204a-g的導電膜的感測電容器電極之間的區域。溝槽區域208可以包括導電走線,以將感測電容器電極204a-g連接到電荷感測電路和/或其他電路。
由於形成感測電容器電極陣列的導電膜不是完全透明,所以在特定範例中可以看到佈局202。然而,當併入配置為頭戴式設備時,在大多數正常使用期間,佈局202可以定位於比人眼焦距更近的位置。所以佈局202可以在普通設備使用期間對用戶失焦,因此不會妨礙用戶或分散用戶的注意力。
圖3示出範例頭戴式裝置300。頭戴式裝置300包括一個或多個臉部追蹤感測器302,以及對應的一個或多個電荷感測電路304。每個臉部追蹤感測器302包括配置為定位於靠近臉部表面的感覺電容器電極306,它可以基於感覺電容器電極306與臉部表面之間的距離形成電容。
頭戴式裝置300同時包含控制器308,其配置為將參考電壓施加到一個或多個臉部追蹤感測器302的感測電容器電極306。
如上所述,每個電荷感測電路304配置為透過確定由參考電壓產生的,並在感測電容器電極306累積的電荷量來確定相應的臉部追蹤感測器302的感測電容器電極306的電容。例如,電容C可以用Q=C*V來確定,其中V是參考電壓,Q是由參考電壓產生的在感測電容器電極306累積的電荷量。
在一個實施例中,每個電荷感測電路304進一步配置為至少基於對由參考電壓產生的相應面部追蹤感測器302的感測電容器電極306累積的電荷量進行過採樣而產生多個電容位值。過採樣包括對感測器電容電極306的電荷進行重複取樣,並對重複採樣進行濾波。
在一個實施例總,可以同時確定在多個感測電容器電極306中的每一個累積的電荷。因此,控制器308可以配置為並發操作對應的電荷感測電路304中的一個或多個。這樣的配置可能有助於實現比利用臉部追蹤感測器的時間復用操作的配置更快的操作。
頭戴式裝置300同時包含沿著一個或多個電荷感測電路304與對應的一個或多個臉部追蹤感測器302之間的電氣連接的shielding track 310。 shielding track 310可以幫助減少來自靠近一個或多個臉部追蹤感測器302與相應的一個或多個電荷感測電路304之間的電連接的導體的電幹擾,例如感測電容器電極306之間的電容串擾。
減少電容串擾有助於減少感測誤差和/或降低雜訊。例如,shielding track 310可以幫助在頭戴式裝置300的電接地和電氣連接之間電抵消雜散電容。
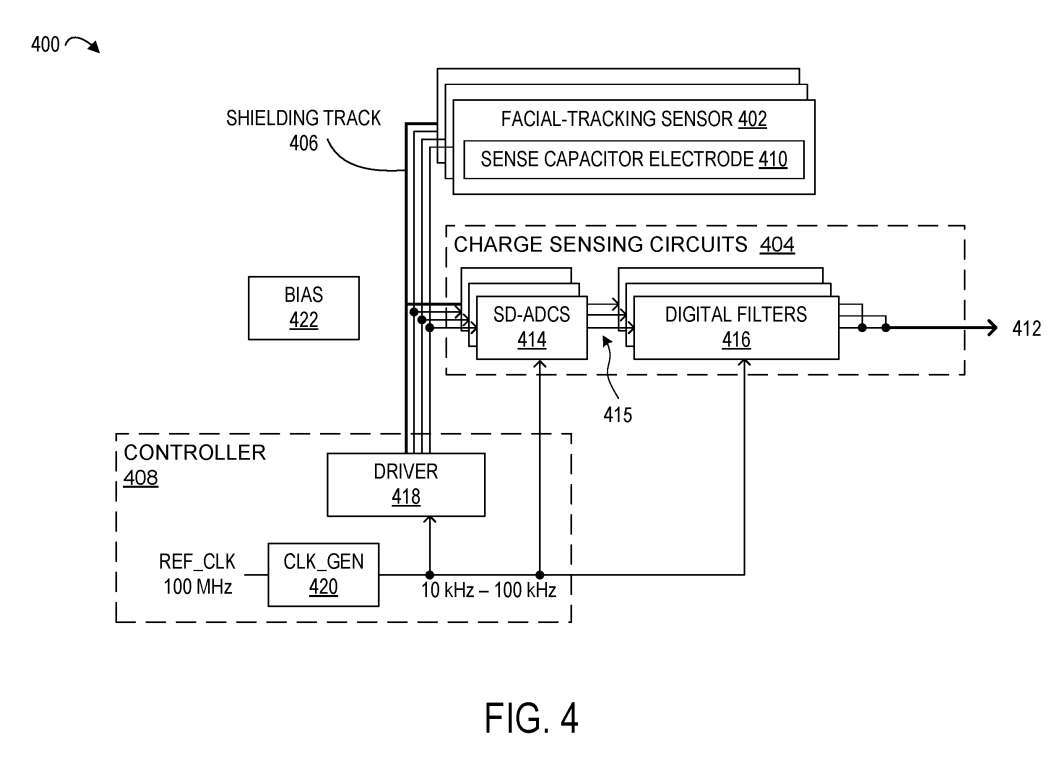
圖4描述了頭戴式裝置400的更詳細框圖。頭戴式裝置400是頭戴式裝置300的範例實作。與頭戴式裝置300類似,頭戴式裝置400包括多個臉部追蹤感測器402、對應的多個電荷感測電路404、shielding track 406和控制器408。
與臉部追蹤感測器302類似,多個臉部追蹤感測器402中的每個臉部追蹤感測器包括感測電容器電極410。在所描述的實施例中,每個電荷感測電路404配置為至少基於對累積的電荷量進行過採樣而產生多個電容位值412。每個電荷感測電路404包括一個SD-ADC 414和一個連接到SD-ADC 414輸出端的數位濾波器416。
作為範例,SD-ADC 414對電荷感測電路404的輸入進行過取樣,並輸出位元流415。位流至少是基於對輸入進行過採樣而指示累積的電荷量。
在一個實施例中,過採樣可包括50至256範圍內的過採樣比。在其它實施例中,過採樣可包括任何其它合適的過採樣比。輸入過取樣可能有助於提高SD-ADC 414的精度,允許類比數位轉換的雜訊整形,和/或降低SD-ADC 414的設計複雜度。作為範例,雜訊整形可以將雜訊塑造為更高的頻率,並且因此可以促進雜訊的濾波。
數位濾波器416將位元流415從SD-ADC 414轉換為多個電容位值412,並過濾來自多個電容位值412的高頻雜訊。這種雜訊濾波有助於提高訊號雜訊比。在SD-ADC 414包含二階SD-ADC的範例中,數位濾波器416包含二階濾波器。在其他範例中,每個SD-ADC 414和每個數位濾波器416可以分別包含任何適當順序的SD-ADC和數位濾波器。
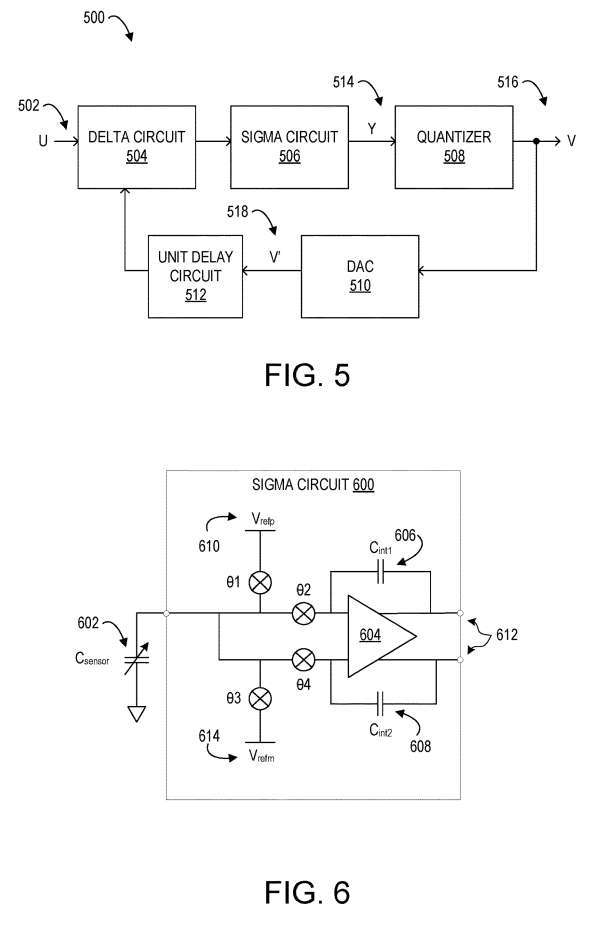
圖5描述了範例SD-ADC 500的框圖。 SD-ADC 500是SD-ADC 414的範例實作。 SD-ADC 500接收類比輸入U 502,並透過增量電路504、Sigma電路506和量化器508輸出數位輸出V。
SD-ADC 500同時包含包含數位類比轉換器DAC 510和單位延遲電路512的回授路徑。 Delta電路504比較輸入U 502和回授路徑輸出之間的差值。例如,增量電路504可以比較輸入U 502和回授路徑輸出之間的類比電壓差。
接下來,Sigma電路506被配置為輸出節點y514,至少基於Delta電路504隨時間的輸出的平均值。隨時間的平均值可以在連續時間或離散時間決定。 Sigma電路506可以包括如下所述的積分器電路和/或任何其他適當的電路。
接著,量化器508對節點y514進行取樣,並基於節點y514的取樣值輸出數位值,形成位元流516。作為具體範例,量化器508可以包括一個比較器電路,比較器電路配置為當節點y514分別低於量化器參考電壓或高於量化器參考電壓時,在一個時脈週期上輸出邏輯0或邏輯1。
圖6顯示連接到感測電容器電極602的範例Sigma電路600。例如,SD-ADC 414和SD-ADC 500可以使用Sigma電路600。 Sigma電路600包括具有第一積分器電容器606和第二積分器電容器608的積分器604。西格瑪電路600的操作透過第一控制點θ1、第二控制點θ2、第三控制點θ3和第四個控制點θ4來控制。在一些範例中,Sigma電路600之外的控制器(例如控制器408)可以控制第一、第二、第三和第四個控制點。
當第一控制點θ1導電時,第一參考電壓610連接到感測電容器電極602。這樣,將第一參考電壓610施加到感測電容器電極602。然後,第一控制點θ1打開,第二控制點θ2導通,將參考電壓產生的累積在感測電容器電極602的電荷傳遞給第一積分器電容器606。第一積分器電容器606和積分器604根據所累積的電荷輸出電壓。
在另一實施例中,當第一控制點θ1開啟時,第二控制點θ2和第四控制點θ4導通,將在感應電容器電極602累積的電荷傳遞給第一積分器電容器606和第二積分器電容器608。
在這樣的配置中,積分器604完全微分,並且累積的電荷在第一和第二積分器電容器606、608之間被分割。因此,輸出電壓在積分器604的輸出節點之間分割,如612所示。全差分積分器可以幫助提高SD-ADC的精度,降低對雜散噪點和/或耦合的敏感性,和/或降低SD-ADC的設計複雜性。
接著,當第三控制點θ3導通時,連接第二參考電壓614並將其施加到感測電容器電極602。在所描述的實施例中,施加第一參考電壓610在第一周期中將在感測電容器電極602累積的電荷定向到積分器604的非反相輸入,施加第二參考電壓614在第二週期中將在感測電容器電極602累積的電荷定向到積分器604的反相輸入。
同樣,第三控制點θ3打開,第四控制點θ4導通,將在感應電容器電極602累積的電荷傳遞給第二積分器電容器608。然後,第二積分器電容器608和積分器604是基於所累積的電荷輸出電壓。在其他實施例中,第一、第二、第三和第四控制點可以以任何其他適當的方式控制。
在一個實施例中,裝置的一個或多個臉部追蹤感測器可以在電上看到大於到臉部上近處點的電容的偏壓電容,這可能幹擾對臉部的較小電容的感測。可以透過使用具有與偏移電容相似或等效電容值的電容器來電抵消這種偏移電容。
然而,較大的電容器可能會消耗更大的面積。因此,圖7顯示的頭戴式設備700利用可連接到感測電容器電極704的相對較小的固定電容器702來電抵銷偏壓電容706。
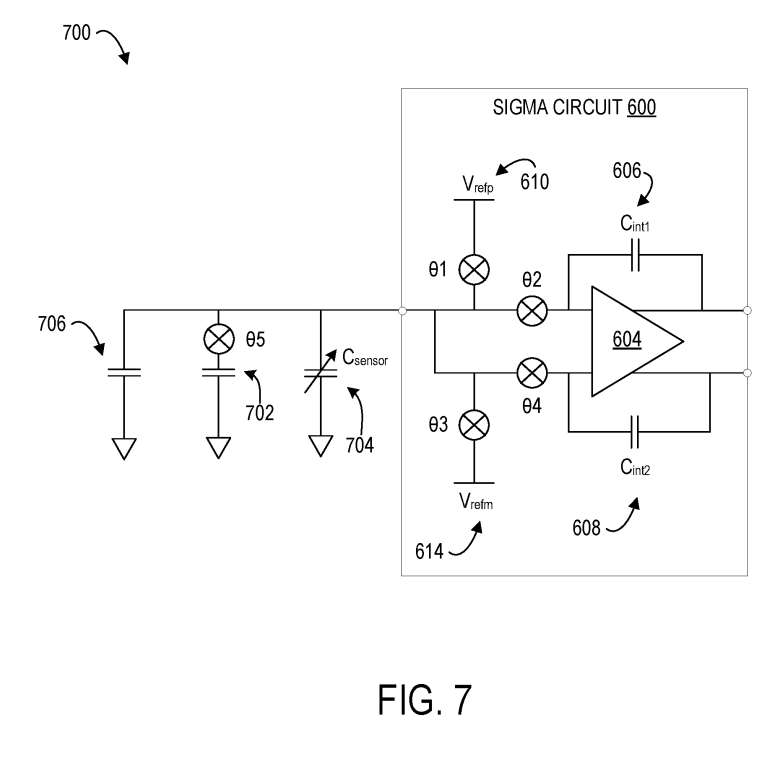
在所描述的範例中,如上所述,第一控制點θ1導通,並將第一參考電壓610施加於感測電容器電極704。然後,第一控制點θ1打開,位於固定電容器702連接上的第五控制點θ5撥動以電抵消感應電容器電極704上的偏壓電容706。開關的數量可以基於固定電容器702的電容值和偏壓706的值。
例如,當偏壓電容706比固定電容702大10倍時,則第五控制點θ5可以切換10次以電抵消偏壓706。與省略此切換的實作相比,使用第五個控制點θ5的切換可以幫助縮小頭戴式裝置700上的固定電容器702的尺寸。圖7所示為單一感測電容器電極、固定電容器和Sigma電路,其他實施例可包括多個感測電容器電極以及相應的多個固定電容器和西格瑪電路。
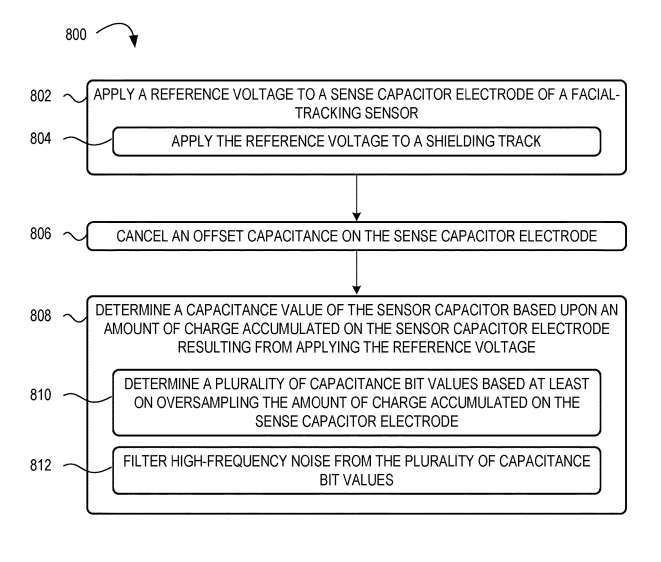
圖8描述了確定感測電容器電極電容值的範例方法800的流程圖。
在802,對臉部追蹤感測器的感應電容電極施加參考電壓。
在804,沿著臉部追蹤感測器和電荷感測電路之間的電氣連接將參考電壓施加到shielding track。將參考電壓施加到屏蔽軌道上可以幫助電抵消頭戴式設備上多個面部追蹤感測器的感測電容器電極之間的電容。另外,將所述參考電壓施加到所述屏蔽軌跡可有助於使能夠同時操作相應的多個電荷感測電路。
如上所述,頭戴式裝置可以在感測電容器電極看到偏移電容。在這樣的實例中,806包括透過切換偏移補償電容器的連接來放電偏移電容,從而消除感應電容器電極上的偏移電容。
在一個實施例中,偏移補償電容器可包括可多次切換的較小的固定電容器。以這種方式,較小的固定電容可以電地抵消較大的偏壓電容。在其它範例中,偏移補償電容器可包括可編程電容器,可選擇性地控制以調整電容值。
繼續在808,基於由於施加參考電壓而在臉部追蹤感測器的感測電容器電極累積的電荷量,確定臉部追蹤感測器的感測電容器電極的電容值。
在一個實施例中,確定所述感測電容器電極的電容值包括至少基於對所述面部追蹤感測器的所述感測電容器電極累積的電荷量進行過採樣來確定多個電容位值,如810所示。
作為範例,多個電容位值可以包括指示在感測電容器電極上累積的電荷量的二進制數。如前所述,SD-ADC可以將多個電容位值上的雜訊塑造為更高的頻率。因此,方法800在812包括從多個電容位值濾除高頻雜訊。濾波高頻雜訊有助於提高電容位值的訊號雜訊比。
相關專利:Microsoft Patent | Determining charge on a facial-tracking sensor
名為「Determining charge on a facial-tracking sensor」的微軟專利申請最初在2022年6月提交,並在日前由美國專利商標局公佈。
要注意的是,一般來說,美國專利申請接收審查後,自申請日或優先權日起18個月自動公佈或根據申請人要求在申請日起18個月內進行公開。注意,專利申請公開不代表專利核准。在專利申請後,美國專利商標局需要實際審查,時間可能在1年至3年不等。
另外,這只是一份專利申請,不代表一定通過,同時不確定是否會實際商用及實際的應用效果。
以上是微軟專利為AR眼鏡臉部追蹤提出改善的感測器電容值測量的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 最佳AI藝術生成器(免費付款)創意項目
Apr 02, 2025 pm 06:10 PM
最佳AI藝術生成器(免費付款)創意項目
Apr 02, 2025 pm 06:10 PM
本文回顧了AI最高的藝術生成器,討論了他們的功能,對創意項目的適用性和價值。它重點介紹了Midjourney是專業人士的最佳價值,並建議使用Dall-E 2進行高質量的可定製藝術。
 開始使用Meta Llama 3.2 -Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
開始使用Meta Llama 3.2 -Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
Meta的Llama 3.2:多模式和移動AI的飛躍 Meta最近公佈了Llama 3.2,這是AI的重大進步,具有強大的視覺功能和針對移動設備優化的輕量級文本模型。 以成功為基礎
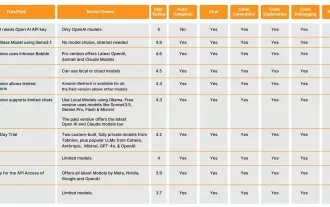
 最佳AI聊天機器人比較(Chatgpt,Gemini,Claude&更多)
Apr 02, 2025 pm 06:09 PM
最佳AI聊天機器人比較(Chatgpt,Gemini,Claude&更多)
Apr 02, 2025 pm 06:09 PM
本文比較了諸如Chatgpt,Gemini和Claude之類的頂級AI聊天機器人,重點介紹了其獨特功能,自定義選項以及自然語言處理和可靠性的性能。
 頂級AI寫作助理來增強您的內容創建
Apr 02, 2025 pm 06:11 PM
頂級AI寫作助理來增強您的內容創建
Apr 02, 2025 pm 06:11 PM
文章討論了Grammarly,Jasper,Copy.ai,Writesonic和Rytr等AI最高的寫作助手,重點介紹了其獨特的內容創建功能。它認為Jasper在SEO優化方面表現出色,而AI工具有助於保持音調的組成
 向員工出售AI策略:Shopify首席執行官的宣言
Apr 10, 2025 am 11:19 AM
向員工出售AI策略:Shopify首席執行官的宣言
Apr 10, 2025 am 11:19 AM
Shopify首席執行官TobiLütke最近的備忘錄大膽地宣布AI對每位員工的基本期望是公司內部的重大文化轉變。 這不是短暫的趨勢。這是整合到P中的新操作範式
 AV字節:Meta' llama 3.2,Google的雙子座1.5等
Apr 11, 2025 pm 12:01 PM
AV字節:Meta' llama 3.2,Google的雙子座1.5等
Apr 11, 2025 pm 12:01 PM
本週的AI景觀:進步,道德考慮和監管辯論的旋風。 OpenAI,Google,Meta和Microsoft等主要參與者已經釋放了一系列更新,從開創性的新車型到LE的關鍵轉變
 10個生成AI編碼擴展,在VS代碼中,您必須探索
Apr 13, 2025 am 01:14 AM
10個生成AI編碼擴展,在VS代碼中,您必須探索
Apr 13, 2025 am 01:14 AM
嘿,編碼忍者!您當天計劃哪些與編碼有關的任務?在您進一步研究此博客之前,我希望您考慮所有與編碼相關的困境,這是將其列出的。 完畢? - 讓&#8217
 選擇最佳的AI語音生成器:評論的頂級選項
Apr 02, 2025 pm 06:12 PM
選擇最佳的AI語音生成器:評論的頂級選項
Apr 02, 2025 pm 06:12 PM
本文評論了Google Cloud,Amazon Polly,Microsoft Azure,IBM Watson和Discript等高級AI語音生成器,重點介紹其功能,語音質量和滿足不同需求的適用性。
