

樂聚人形機器人「誇父」透過 OpenHarmony 3.2 相容性驗證

根據OpenHarmony官方公眾號訊息,樂聚旗下的"誇父"機器人今日宣布透過OpenHarmony 3.2 Release版本的兼容性測評
據報道,誇父機器人是由深圳開鴻聯合樂聚機器人技術有限公司(簡稱“樂聚”)共同開發的,被稱為是“國內首款具備跳躍和適應多種地形行走能力的開源鴻蒙人形機器人”
▲ 圖片來源 樂聚官網(下同)
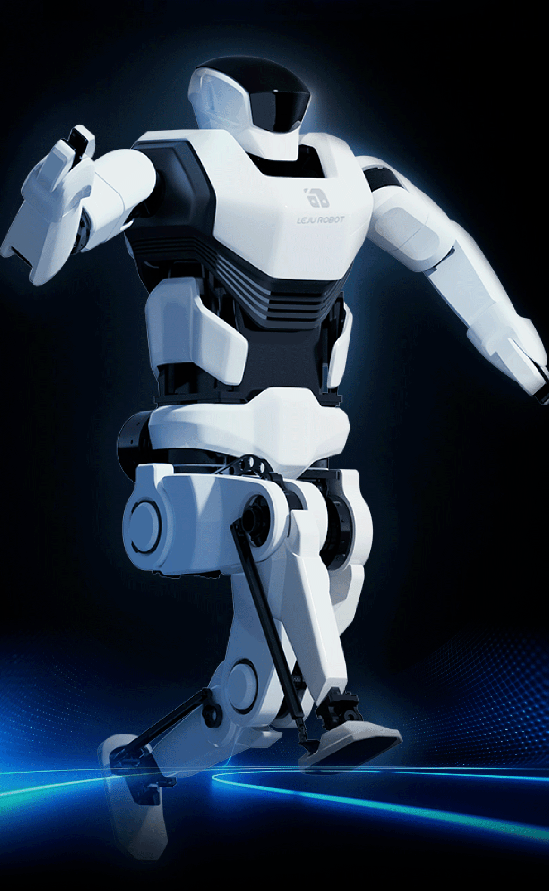
IT之家從訊息中了解到,該機器人搭載了深開鴻基於開源鴻蒙研發的KaihongOS作業系統,採用了全端開源設計,並且運動控制器完全開源。該機器人可以連接軌跡規劃、反饋控制、狀態估計等模組,而且其步態演算法聲稱可以適應各種地形,包括沙地、草地和障礙物等,並且可以跳躍高度達到20厘米
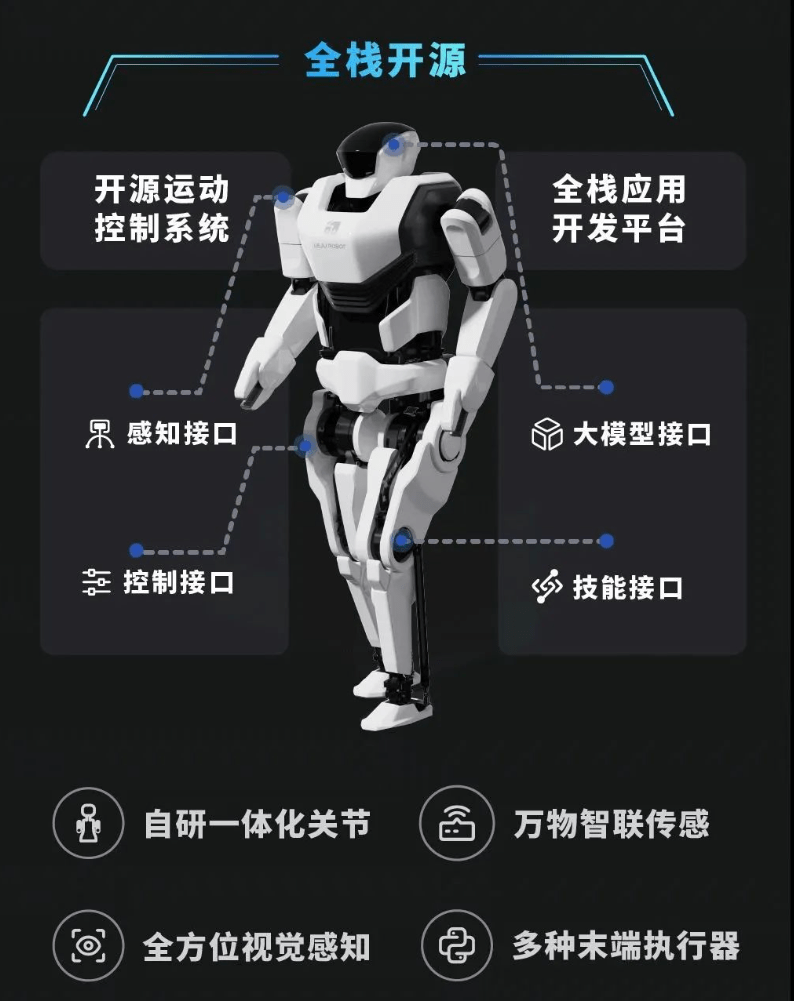
在感知方面,這款機器人可以搭載各種不同的開鴻感測器,並且配備了深度攝影機。它還可以搭配多種末端配件進行二次開發,並且可以與主流大模型進行對接
以上是樂聚人形機器人「誇父」透過 OpenHarmony 3.2 相容性驗證的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)
熱門話題



 我嘗試了使用光標AI編碼的Vibe編碼,這太神奇了!
Mar 20, 2025 pm 03:34 PM
我嘗試了使用光標AI編碼的Vibe編碼,這太神奇了!
Mar 20, 2025 pm 03:34 PM
Vibe編碼通過讓我們使用自然語言而不是無盡的代碼行創建應用程序來重塑軟件開發的世界。受Andrej Karpathy等有遠見的人的啟發,這種創新的方法使Dev
 2025年2月的Genai推出前5名:GPT-4.5,Grok-3等!
Mar 22, 2025 am 10:58 AM
2025年2月的Genai推出前5名:GPT-4.5,Grok-3等!
Mar 22, 2025 am 10:58 AM
2025年2月,Generative AI又是一個改變遊戲規則的月份,為我們帶來了一些最令人期待的模型升級和開創性的新功能。從Xai的Grok 3和Anthropic的Claude 3.7十四行詩到Openai的G
 如何使用Yolo V12進行對象檢測?
Mar 22, 2025 am 11:07 AM
如何使用Yolo V12進行對象檢測?
Mar 22, 2025 am 11:07 AM
Yolo(您只看一次)一直是領先的實時對象檢測框架,每次迭代都在以前的版本上改善。最新版本Yolo V12引入了進步,可顯著提高準確性
 Chatgpt 4 o可用嗎?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 o可用嗎?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4當前可用並廣泛使用,與諸如ChatGpt 3.5(例如ChatGpt 3.5)相比,在理解上下文和產生連貫的響應方面取得了重大改進。未來的發展可能包括更多個性化的間
 最佳AI藝術生成器(免費付款)創意項目
Apr 02, 2025 pm 06:10 PM
最佳AI藝術生成器(免費付款)創意項目
Apr 02, 2025 pm 06:10 PM
本文回顧了AI最高的藝術生成器,討論了他們的功能,對創意項目的適用性和價值。它重點介紹了Midjourney是專業人士的最佳價值,並建議使用Dall-E 2進行高質量的可定製藝術。
 O1 vs GPT-4O:OpenAI的新型號比GPT-4O好嗎?
Mar 16, 2025 am 11:47 AM
O1 vs GPT-4O:OpenAI的新型號比GPT-4O好嗎?
Mar 16, 2025 am 11:47 AM
Openai的O1:為期12天的禮物狂歡始於他們迄今為止最強大的模型 12月的到來帶來了全球放緩,世界某些地區的雪花放緩,但Openai才剛剛開始。 山姆·奧特曼(Sam Altman)和他的團隊正在推出12天的禮物前
 Google的Gencast:Gencast Mini Demo的天氣預報
Mar 16, 2025 pm 01:46 PM
Google的Gencast:Gencast Mini Demo的天氣預報
Mar 16, 2025 pm 01:46 PM
Google DeepMind的Gencast:天氣預報的革命性AI 天氣預報經歷了巨大的轉變,從基本觀察到復雜的AI驅動預測。 Google DeepMind的Gencast,開創性
 哪個AI比Chatgpt更好?
Mar 18, 2025 pm 06:05 PM
哪個AI比Chatgpt更好?
Mar 18, 2025 pm 06:05 PM
本文討論了AI模型超過Chatgpt,例如Lamda,Llama和Grok,突出了它們在準確性,理解和行業影響方面的優勢。(159個字符)
