

Apollo與Carsim/TruckSim合作進行聯合仿真

1.背景
模擬在自動駕駛研發中扮演著重要角色,它能夠大幅提高研發效率,並為演算法的可靠性提供保障。百度Apollo系統作為一個優秀的開源平台,非常適合有意學習自動駕駛的朋友進行研究。此外,Carsim/Trucksim是備受推崇的經典汽車動力學模擬工具。
本文介紹了透過Apollo和Trucksim的聯合,實現本地即時模擬的方法。適合初學者建構模擬平台並研究Apollo系統。
2. 架構設計
Apollo工程的核心程式碼是用C 實現的。 Trucksim的常用介麵包括simulink、Python和C語言。本文將先介紹Apollo、simulink和Trucksim聯合模擬的架構,並討論此模擬系統的問題。接下來,將重點討論Apollo和Trucksim的聯合模擬。
2.1 Apollo, simulink和Trucksim方案
Simulink和Apollo可以透過ROS進行通訊。由於Apollo的訊息資料格式是protobuf,而Simulink的ROS工具只支援標準的ROS訊息(ROS msg),因此可以在Apollo中加入一個格式轉換的節點來實現相容。關於Simulink召喚Trucksim的方案,網路上有許多資源可供參考,就不再詳述了。
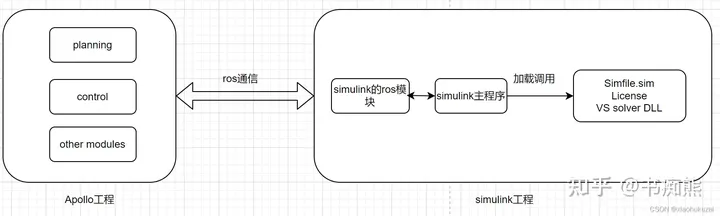
simulink方案圖
2.2 Apollo,rosbridge和Trucksim方案
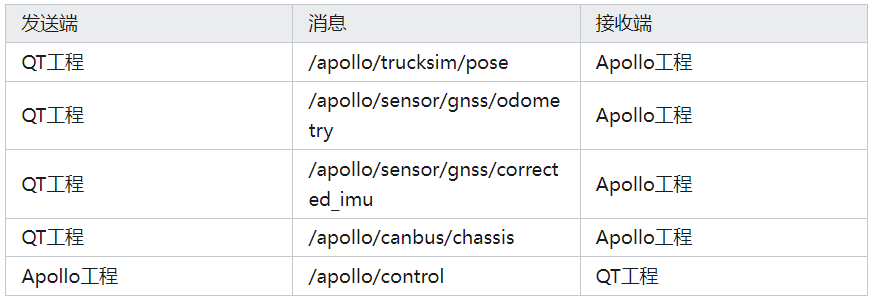
建立QT工程和Apollo工程之間的websocket通訊。在Apollo工程中,透過增加rosbridge(或cyber_bridge)模組來實現ros訊息(或cyber訊息)與websocket的互轉。 QT工程作為websocket客戶端使用C 實現,並呼叫Trucksim的動態函式庫,實現即時運行Trucksim的功能。
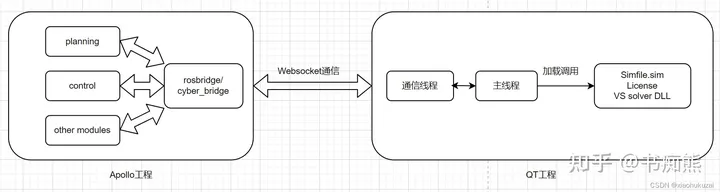
rosbridge方案圖
3. 功能實作
3.1 Apollo, simulink與Trucksim方案
3.1.1 Simulink設定
Simulink的工具包中有ROS的支援包,設定ROS網路位址如圖2所示。 Hostname/IP Address和Port分別為ROS_MASTER_URI的位址和連接埠號碼,在上面的通訊機制中有說明。
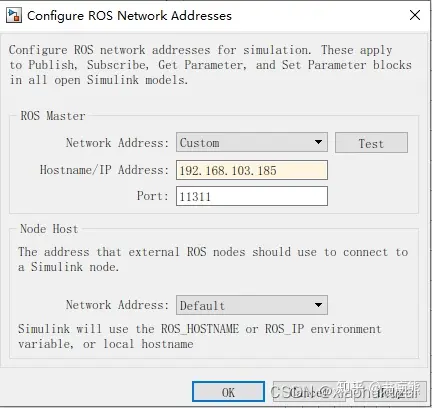
設定ROS網路位址
ROS subscriber接收interface的訊息,因此Topic, Message type, Sample time要與interface中程式相對應。

設定ros subcribe
為了方便偵錯驗證,現在MATLAB端啟動ROS。設定流程如下:
MATLAB設定的指令:
>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')>> setenv('ROS_IP','192.168.103.198')>> rosinit('192.168.103.122')3.1.2 TruckSim設定
設定介面
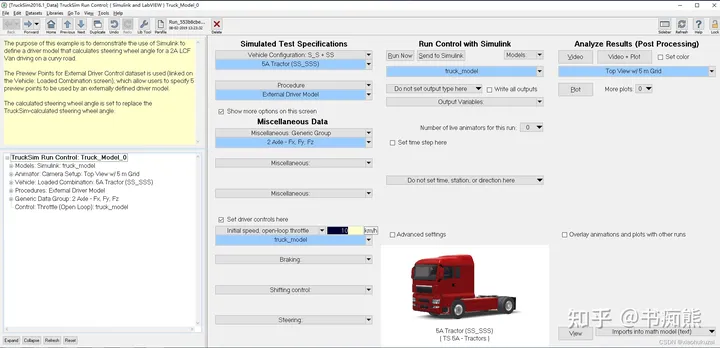
Trucksim是嚮導式編程,參數配置介面:卡車選擇5A Tractor(SS_SSS),具體參數見圖3.控制介面:Models選擇simulink。
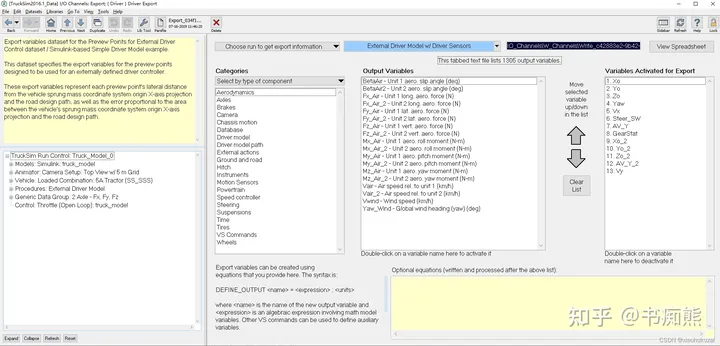
主介面
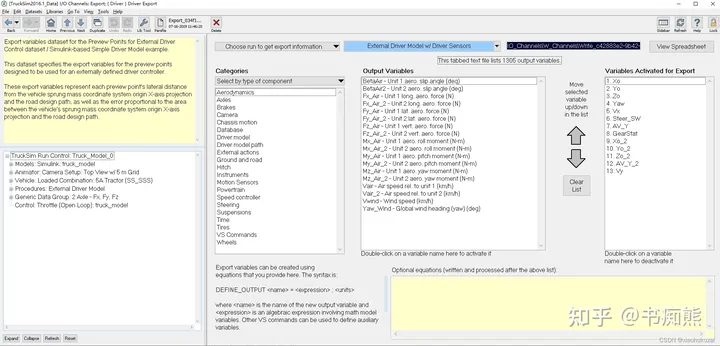
#輸入參數設定介面
輸出參數設定介面
3.2 Apollo, rosbridge與Trucksim方案#3.2.1 apollo設定rosbridge
##rosbridge安裝網路教學課程較多,本文不再贅述。
使用方法如下:
cd ros_pkgs_ws
catkin_make
啟動rosbridge
source /apollo/ros_pkgs_ws/devel/setup.bash
PATH=/usr/local/miniconda2/bin:$PATHroslaunch rosbridge_server rosbridge_websocket.launch
#3.2.1 Qt工程設定說明
{"op":"publish","topic":"/apollo/tucksim/pose","msg": {"header": {"timestamp_sec":1572253610.76292, "sequence_num":77}, "trucksimpose": {"XCG_TM":30.9964522249, // 单位:m "YCG_TM":0.657853758823, // 单位:m "ZCG_TM":1.00644079555, // 单位:m "YAW":-0.015505948987, // 单位:rad "VX":7.81497285565, // 单位:m/s "STEER_SW":2.84450684087, // 单位:rad "AV_Y":0.133153549217, // 单位:rad/s "GEARSTAT":5.0, // 无单位 "XCG_TM2":22.5890979801, // 单位:m "YCG_TM2":-0.471483304991, // 单位:m "ZCG_TM2":2.08466406388, // 单位:m "YAW_2":-0.0253130178796, // 单位:rad "VY":0.326368169782, // 单位:m/s "DISTANCE":31.0034324244, // 单位:m "DELTA_YAW":-0.015505948987, // 单位:rad "DISTANCE_2":22.5940178822, // 单位:m "DELTA_YAW_2":-0.0253130178796 // 单位:rad/s } }}4. 使用心得
- TruckSim模型离散时间补偿设置为0.001s,即模型更新频率为1000hz,选择每个步长更新两次的积分方法(如:AM-2, RK-2等)。
注释:
1)真车是一个高阶非线性连续系统,TruckSim通过固定时间步长离散系统来模拟真车,当模型步长选择较大时(如之前设置的0.01s),模型较不准;TruckSim模型是由悬架系统-动力系统-转向系统-制动系统-轮胎模型-空气动力学等系统构成的复杂系统,当其中一个或多个系统因为时间步长太大而很不准时,就会出现车抖动比较明显的现象。
2)模型更新频率设为1000hz是TruckSim官网推荐的,经验证,这个频率能解决车抖动问题。
- 接口线程加载频率用定时器控制,加载调用simfile.sim,license和DLL的频率设置为1000hz,与Trucksim模型离散步长一致。
注释:
受3中积分方法决定,当选择每个步长更新两次的积分方法,VS_EXT_EQ_IN和VS_EXT_EQ_OUT更新频率是加载频率的2倍,为2000hz。

原文链接:https://mp.weixin.qq.com/s/8QNp5iQebE3lPJzEgq_bOA
以上是Apollo與Carsim/TruckSim合作進行聯合仿真的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)




 現貨王者轉型記:Gate.io MeMebox 2.0如何佈局下一代鏈上生態?
Apr 28, 2025 pm 03:36 PM
現貨王者轉型記:Gate.io MeMebox 2.0如何佈局下一代鏈上生態?
Apr 28, 2025 pm 03:36 PM
Gate.io通過MeMebox 2.0實現了從現貨交易向鏈上生態的轉型。 1) 構建跨鏈基礎設施,支持12條主鏈互通;2) 打造DeFi應用生態,提供一站式服務;3) 實施激勵機制,重構價值分配。
 比特幣值多少美金
Apr 28, 2025 pm 07:42 PM
比特幣值多少美金
Apr 28, 2025 pm 07:42 PM
比特幣的價格在20,000到30,000美元之間。 1. 比特幣自2009年以來價格波動劇烈,2017年達到近20,000美元,2021年達到近60,000美元。 2. 價格受市場需求、供應量、宏觀經濟環境等因素影響。 3. 通過交易所、移動應用和網站可獲取實時價格。 4. 比特幣價格波動性大,受市場情緒和外部因素驅動。 5. 與傳統金融市場有一定關係,受全球股市、美元強弱等影響。 6. 長期趨勢看漲,但需謹慎評估風險。
 十大虛擬幣交易app 十大虛擬幣交易平台最新排行榜2025年
Apr 28, 2025 pm 02:09 PM
十大虛擬幣交易app 十大虛擬幣交易平台最新排行榜2025年
Apr 28, 2025 pm 02:09 PM
十大虛擬幣交易app分別是:1. OKX,2. Binance,3. gate.io,4. Coinbase,5. Kraken,6. Huobi,7. KuCoin,8. Bitfinex,9. Bitstamp,10. Poloniex,各平台在交易產品、用戶體驗、安全性等方面表現突出,滿足不同投資者的需求。
 靠譜的數字貨幣交易平台推薦 全球十大數字貨幣交易所排行榜2025
Apr 28, 2025 pm 04:30 PM
靠譜的數字貨幣交易平台推薦 全球十大數字貨幣交易所排行榜2025
Apr 28, 2025 pm 04:30 PM
靠谱的数字货币交易平台推荐:1. OKX,2. Binance,3. Coinbase,4. Kraken,5. Huobi,6. KuCoin,7. Bitfinex,8. Gemini,9. Bitstamp,10. Poloniex,这些平台均以其安全性、用户体验和多样化的功能著称,适合不同层次的用户进行数字货币交易
 如何選擇合規安全的比特幣交易平台
Apr 28, 2025 pm 05:42 PM
如何選擇合規安全的比特幣交易平台
Apr 28, 2025 pm 05:42 PM
選擇合規安全的比特幣交易平台需評估其監管許可、KYC/AML政策和安全措施,推薦Binance、OKX和gate.io三大平台。
 十大安全好用的虛擬幣交易平台 2025年十大虛擬幣交易所最新排行榜
Apr 28, 2025 pm 01:33 PM
十大安全好用的虛擬幣交易平台 2025年十大虛擬幣交易所最新排行榜
Apr 28, 2025 pm 01:33 PM
十大安全好用的虛擬幣交易平台包括:1. OKX,2. Binance,3. gate.io,4. Coinbase,5. Kraken,6. Huobi,7. Bitfinex,8. KuCoin,9. Bitstamp,10. Bittrex,這些平台各具特色,均提供註冊、存款、提款和交易操作指南,確保用戶體驗安全且便捷。
 芝麻開門官網入口 芝麻開門官方最新入口2025
Apr 28, 2025 pm 07:51 PM
芝麻開門官網入口 芝麻開門官方最新入口2025
Apr 28, 2025 pm 07:51 PM
芝麻開門是重點加密貨幣交易的平台,用戶可以通過官方網站或社交媒體獲取入口,確保訪問時驗證SSL證書和網站內容的真實性。
