

全面介紹自動駕駛崗位-史上最全篇章

1.背景
近日分享如何高新轉型到自動駕駛領域時,幾位朋友不約而同的問到了我同一個問題:「L2~L4自動駕駛的崗位都有哪些?對應著具體的什麼工作內容?需要哪方面的技能?」今天就針對這個大家都很想了解的話題做個分享。
首先介紹下自動駕駛的系統框圖(簡化版)讓大家對自動駕駛有個全局的概念
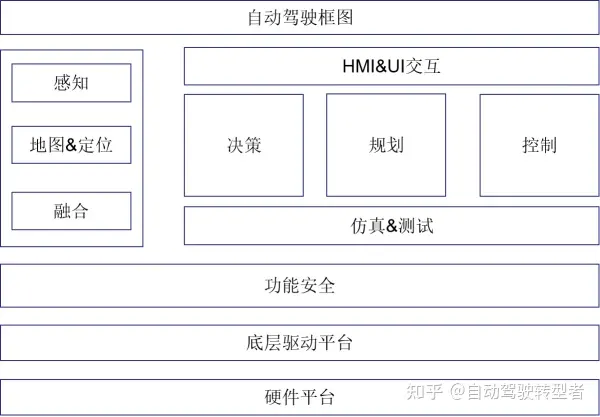
- 接下來,我們分為兩大類進行介紹:演算法工程師和非演算法類工程師。
- 演算法工程師
- 雷射SLAM演算法工程師
- 視覺SLAM演算法工程師
- 多感測器融合演算法工程師
- 機器學習演算法工程師
- 電腦視覺演算法工程師
- 自然語言處理演算法工程師
- 決策演算法工程師
- 規劃演算法工程師
- 控制演算法工程師
- 非演算法類別工程師
- #軟體平台開發工程師
- 系統工程師
- 功能安全工程師
- 標定工程師
- 模擬環境工程師
- 測試工程師
- 資料工程師
- UI開發工程師
- 下面詳細介紹每個職位的工作職責和需要學習的內容
2.演算法工程師
2.1.雷射SLAM演算法工程師
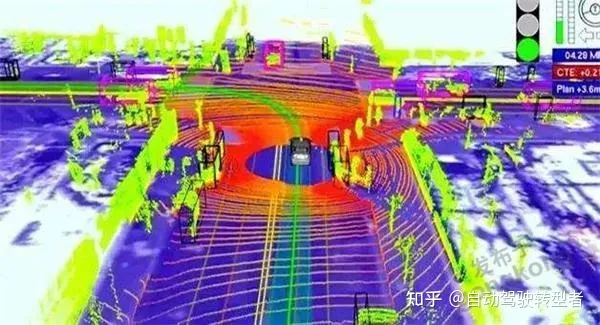
- #職位介紹: ##收集雷射感測器數據,根據點雲數據對自動駕駛車輛的周圍環境進行地圖建構。
- 負責實現基於雷射感測器的SLAM演算法設計和開發,能夠涵蓋各種複雜場景的高精度地圖更新和製作。
- 技能需求: 使用c、c 程式設計;
- 需要有濾波演算法知識:ESKF、EKF、UKF等;
- 同時需要學習G2O、ceres等用來最佳化非線性誤差函數的c 框架。
- 熟悉開源SLAM框架,如GLoam、kimera、VINS等優先;
2.2.視覺SLAM演算法工程師

- 職位介紹: 以VSLAM為基礎,研發機器人自主導航定位演算法,包括基於雷射雷達、陀螺儀、里程計、視覺等多資訊融合,建構機器人運動模型
- 技能需求: 學習常用的VSLAM演算法,如ORB-SLAM、SVO、DSO、MonoSLAM,VINS以及RGB-D等等;
- ROS機器人作業系統;
- 需要有濾波演算法知識:ESKF、EKF、UKF等;
- 同時需要學習G2O、ceres等用來優化非線性誤差函數的c 框架。
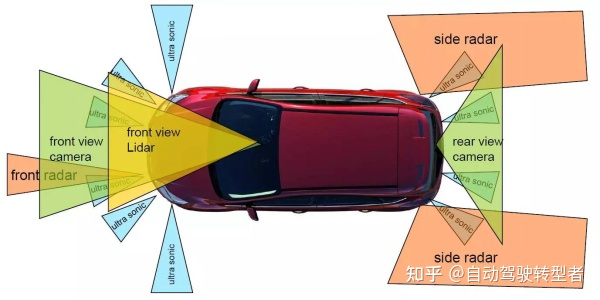
2.3.多感測器融合演算法工程師
 #
#
- 職位介紹:
- 將相機、雷射雷達、毫米波雷達等多感測器的資訊處理與融合,提升自主駕駛的環境感知能力;
- 負責基於多源資訊融合的目標偵測、追蹤、識別與定位;
- 負責基於多源資訊融合的環境特徵抽取,為地圖建構提供支援;為基於多源資訊融合的導航定位提供支援。
- 技能需求:
- 掌握camera、毫米波雷達、雷射雷達、慣性導航等相關資料解析融合演算法;
- 電腦資訊科學、電子工程或數學相關專業本科及以上學歷,具備紮實的計算機理論基礎
- 精度相機模型、多視覺幾何、Bundle Adjustment 原理,有SfM、幾何測距等項目經驗
- 精通C/C ,熟悉Matlab,良好的物件導向程式設計思想與編碼習慣
- 熟悉IMU、GPS、DR等慣導定位演算法框架
- 熟悉IMU、GPS、車身系統原理、硬體特性、標定演算法
2.4.機器學習演算法工程師
- 名單介紹: ##此方向主要負責車輛行駛過程中產生的資料在工程上的應用,偏向於資料分析方向,如車輛行駛里程的影響分析、大數據分析建模等等。
- 技能需求: Python,C/C
- 學習機器學習的基礎理論演算法,如LR、GBDT、SVM、DNN等等;
- 學習scikit-learn 等傳統機器學習框架的模型訓練;
- 熟悉PyTorch、TensorFlow等深度學習框架(偏神經網路部分)等等。
2.5.電腦視覺演算法工程師
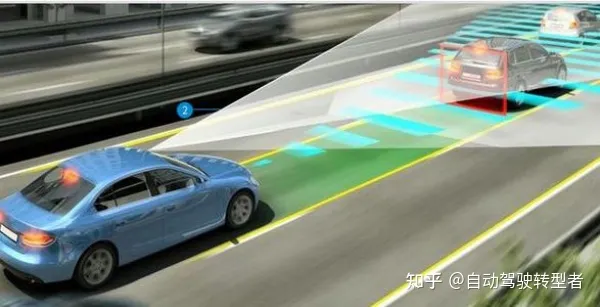
- 職位介紹: 此方向主要基於攝影機感測器,主要包括:車道線偵測、車輛等障礙物偵測、可行駛區域偵測、紅綠燈等交通資訊偵測等等。
- 技能需求: C/C ,Python,OpenCV;
- 需要機器學習的基本演算法( 降維、分類、迴歸等) ;
- 需要學習深度學習,深度學習框架;
- 學習電腦視覺和影像處理的常用方法( 物件偵測、追蹤、分割、分類辨識等) 。
2.6.自然語言處理演算法工程師
- #職位介紹: 此方向主要負責車載場景下的語音識別,語音互動設計等等
- 技能需求: 學習機器學習演算法、深度學習演算法(RNN);
- 自然語言處理基本任務(分詞、詞性標註、句法分析、關鍵字抽取)
- 需要使用機器學習方法聚類、分類、回歸、排序等模型解決文本業務問題;
- 熟悉PyTorch、TensorFlow等深度學習架構(偏RNN部分)等等。
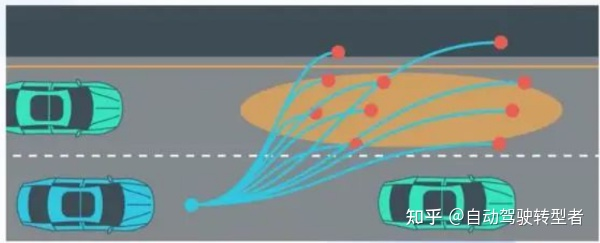
2.7.決策演算法工程師

- 職位介紹: 自動駕駛的決策是將感知模組傳遞的訊息,轉化成車輛的行為,達到駕駛的目標。例如,汽車加速、減速、左轉、右轉、換道、超車都是決策模組的輸出。決策需要考慮到汽車的安全性和舒適性,確保乘客的安全的情況下,盡快到達目標地點。
- 技能需求: c/c /python,熟悉ROS系統;
- 學習常用的決策演算法,如決策狀態機、決策樹、馬可夫決策過程,POMDP等;
- 如果往深裡學的話,需要熟悉機器學習演算法(RNN、LSTM、RL),掌握至少一種深度學習框架(例如gym或universe等深度強化學習平台);
- 熟悉車輛運動學和動力學模型。
2.8.規劃演算法工程師
- 職位介紹:
- 規劃包含路徑規劃與速度規劃
- 規劃演算法中,自動駕駛車輛先透過路徑規劃決定車輛可行駛的路徑,然後選擇該路徑確定可行駛的速度。
- 技能需求:
- c/c /python,ROS機器人作業系統;(有些公司是用Matlab/simulink開發的)
- 學習常見路徑規劃演算法,例如A、D、RRT等;
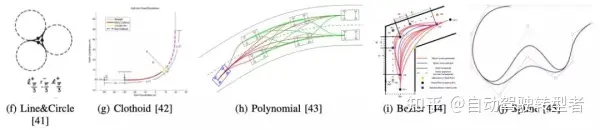
- 學習一些曲線的表示方法,如:五次曲線、迴旋線、三次樣條曲線、B樣條曲線等;
- 如果往深裡學的話;學習軌跡預測演算法,如MDP、POMDP、Came Theory等;
- 學習深度學習和強化學習技術也是加分項,例如RNN、LSTM、Deep Q-Learning等等;
- 有數學理論基礎和背景,熟悉車輛運動學和動力學模型。
2.9.控制演算法工程師
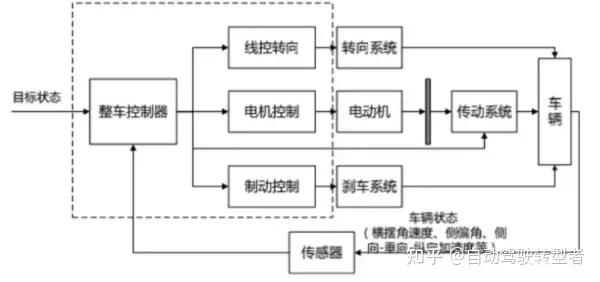
- 崗位介紹:
- 一般是對車輛橫縱向動力學建模,然後開發控制演算法,實現車輛運動控制等;
- 這個崗位跟車輛打交道較多,對於傳統車廠轉型到自動駕駛領域的夥伴來說,是個很好的切入機會。
- 技能需求:
- C/C 、Matlab/Simulink
- 學習自動控制理論基礎,學習現代控制理論;
- 學習PID、LQR、MPC演算法;
- 學習車輛運動學、動力學模型,對汽車的底盤有一定了解;
- 學習CarSim等模擬軟體;
- #學習ACC、AEB、APA、LKA、LCC等輔助駕駛功能開發的是加分項;
- 擁有實車調試經驗也是加分項。
3.非演算法類別工程師
3.1.軟體平台開發工程師
- 職位介紹:
- 設計和實現自動駕駛軟體平台,包括核心修改/擴展、驅動程式實現/增強、中間件實現/增強、系統整合、效能/功耗最佳化、壓力/穩定性/符合性測試;
- 負責建構系統架構、編寫底層驅動程式;
- 負責視覺相關演算法在嵌入式處理器(GPU、DSP、ARM等平台)上的程式碼實現及效能最佳化、測試和維護;
- 協助演算法工程師完成演算法在嵌入平台上的移植、整合、測試和最佳化。
- 技能需求:
- C/C 程式設計技巧、Python;
- 具有嵌入式作業系統和即時作業系統的核心或驅動開發經驗,熟悉QNX、ROS;
- 熟悉軟體調試和debug工具;
- 了解車輛ADAS ECU和感測器,如雷達、攝影機、超音波和雷射雷達;
- 熟悉通用診斷服務(UDS)、控制器區域網路(CAN);
- 熟悉通訊協定(CAN、UDS、DoIP、SOME/IP、DDS、MQTT、REST等)是加分項。
3.2.系統工程師
- #職位介紹:
- 負責客戶需求對接,以及與內部開發人員的需求釋放;
- 負責無人駕駛軟體系統框架建置;
- 負責模組化、可驗證的系統軟體架構設計和即時效能最佳化;
- 與硬體、演算法和測試團隊合作,整合並優化自動駕駛系統。
- 技能需求:
- 擁有紮實的電腦基礎理論知識(如:自動控制、模式辨識、機器學習、電腦視覺、點雲處理);
- 具有嵌入式作業系統和即時作業系統的核心或驅動開發經驗;
- 具備良好的溝通表達能力和團隊合作意識
3.3 .功能安全工程師
- 職位介紹:
- 在產品全生命週期內對產品的功能安全進行支援
- 負責無人/自動駕駛系統產品的功能安全系統設計,並對現有流程提出改進意見;
- 負責無人/自動駕駛系統的危險分析(HARA, FMEAs, FMEDA, FTA);
- 負責無人/自動駕駛系統的安全目標定義;
- 負責無人/自動駕駛系統的安全需求定義;
- 技能要求:
- 精通ISO26262並有自動駕駛或ADAS系統功能安全專案實施經驗;(在傳統車廠做功能安全想要轉行的也可以考慮);
- 了解FMEA,FMEDA,FMEA- MSR,FTA等對應的方法;
3.4標定工程師
- 職位介紹:
- 負責自動駕駛多感測器標定,包括GPS、IMU、LiDAR、Camera、Radar 和USS 等;
- 設計實現感測器內參外參標定演算法,建構多感測器標定係統;
- #負責對標定參數進行相關車輛測試,給予測試報告。
- 技能需求:
- C 程式設計, 熟悉Linux及ROS系統;
- 有感測器標定工作經歷,熟悉視覺或雷射SLAM 演算法;
3.5模擬環境工程師
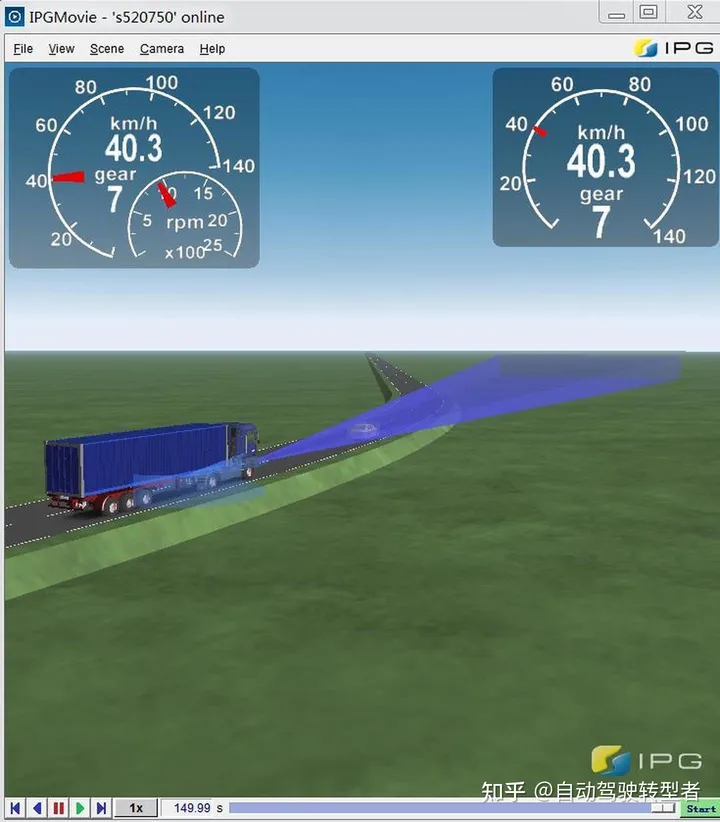
- 崗位介紹:
- 此方向需要參與自動駕駛相關仿真係統的搭建,包括車輛動力學相關仿真,各類虛擬感測器模型及虛擬場景的建模與仿真,根據測試案例建立測試場景,執行自動駕駛演算法模擬測試等等;
- 負責搭建無人駕駛模擬系統,對汽車、感測器、環境進行軟體模擬。模擬結果將與真實數據一同用於預測汽車在真實場景中的行為;
- 配合駕駛決策、路徑規劃、仿真演算法等模組,實現自動駕駛閉環仿真,並視覺化相關調試資訊。
- 技能需求:
- MATLAB/simulink、Python/C
- 熟練操作一種常用車輛動力學或無人車相關模擬軟體,例如Perscan、Carsim、Carmaker等;
- 熟悉機器人作業系統ROS等;
- 有的模擬職位純粹屬於做仿真,但有的崗位需要做仿真環境的開發,這樣的崗位對程式設計要求會更高一些。
3.6測試工程師
- 名單介紹:
- 此方向主要負責自動駕駛車輛的相關測試工作,測試自動駕駛系統功能各項指標的性能,評估其邊界條件與失效模式;
- 負責自動化測試(SIL、HIL)的設計實現及智慧駕駛產品的相關驗證;
- 負責根據系統或產品的功能需求制定測試案例和測試計劃;
- 負責制定完整的系統或產品的測試計劃並實施,最後撰寫測試報告;
- #收集和測試系統的邊界範例,對智慧駕駛系統的安全性進行評估,對技術提出合理的回饋。
- 技能需求:
- 熟悉Ubuntu/Linux作業系統,會寫python腳本
- 熟悉CAN匯流排; ##熟悉測試用例的編寫方法和技巧;
- 熟悉圖像識別演算法,熟悉深度學習,掌握spark等大數據相關工具者加分;
- #熟悉雷射雷達,毫米波雷達,超音波探頭和攝影機的應用是加分項。
3.7大數據開發工程師
- #職位介紹:##資料包含後台資料架構和前台呈現。一輛自動駕駛車每天都要產生1個T的資料量。資料該如何快速清洗、提煉、總結,例如如何迅速找出一次路測中最重要的幾次介入(disengagements)。從而更有效率的幫助工程師測試。
- 負責自動駕駛大數據平台系統的設計、開發與最佳化;
- 負責自動駕駛資料標註與處理流程的視覺化工具開發,自動化標註平台的設計與研發。
- 技能需求:
- 具備紮實的資料結構及演算法功底;
- 精通Java/Python/C 等至少一門高階程式語言;
- 熟悉Linux開發環境;
- 有基於SQL或No-SQL資料庫的應用程式的設計、開發經驗;
- 熟悉REST服務及Web標準,熟悉一種主流前端開發框架,如React/AngularJS,能獨立建構前端應用者加分;
- 熟悉自動駕駛及相關的Lidar、Camera等感測器資料者加分。
- #職位介紹:
- 每個公司都需要建立內部工具,用於驗證整車開發。也需要給遠端控制中心做各種互動頁面,透過一個UI遠端控制自動駕駛汽車。同時也包括車廂內為乘客準備的UI。喜歡設計或擅長前端的朋友可以考慮。
- 技能需求:
- 具有優秀的美感和豐富的視覺表現力;
- 精通色彩、圖形、資訊和GUI設計原則及方法。
最後,國家政策正在大力推廣新能源智慧化汽車,希望越來越多的伙伴一起加入到自動駕駛行業。
 原文連結:https://mp.weixin.qq.com/s/d41a5VYtJ4lvMP3GO6In_g
原文連結:https://mp.weixin.qq.com/s/d41a5VYtJ4lvMP3GO6In_g
以上是全面介紹自動駕駛崗位-史上最全篇章的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 五官亂飛,張嘴、瞪眼、挑眉,AI都能模仿到位,影片詐騙要防不住了
Dec 14, 2023 pm 11:30 PM
五官亂飛,張嘴、瞪眼、挑眉,AI都能模仿到位,影片詐騙要防不住了
Dec 14, 2023 pm 11:30 PM
好強大的AI模仿能力,真的防不住,完全防不住。現在AI的發展已經達到這種程度了嗎?你前腳讓自己的五官亂飛,後腳,一模一樣的表情就被復現出來,瞪眼、挑眉、噘嘴,不管多麼誇張的表情,都模仿的非常到位。加大難度,讓眉毛挑的再高些,眼睛睜的再大些,甚至連嘴型都是歪的,虛擬人物頭像也能完美復現表情。當你在左邊調整參數時,右邊的虛擬頭像也會相應地改變動作給嘴巴、眼睛一個特寫,模仿的不能說完全相同,只能說表情一模一樣(最右邊)。這項研究來自慕尼黑工業大學等機構,他們提出了GaussianAvatars,這種
 MotionLM:多智能體運動預測的語言建模技術
Oct 13, 2023 pm 12:09 PM
MotionLM:多智能體運動預測的語言建模技術
Oct 13, 2023 pm 12:09 PM
本文經自動駕駛之心公眾號授權轉載,轉載請洽出處。原標題:MotionLM:Multi-AgentMotionForecastingasLanguageModeling論文連結:https://arxiv.org/pdf/2309.16534.pdf作者單位:Waymo會議:ICCV2023論文想法:對於自動駕駛車輛安全規劃來說,可靠地預測道路代理未來行為是至關重要的。本研究將連續軌跡表示為離散運動令牌序列,並將多智能體運動預測視為語言建模任務。我們提出的模型MotionLM有以下幾個優點:首
 行人軌跡預測有哪些有效的方法和普遍的Base方法?頂會論文分享!
Oct 17, 2023 am 11:13 AM
行人軌跡預測有哪些有效的方法和普遍的Base方法?頂會論文分享!
Oct 17, 2023 am 11:13 AM
軌跡預測近兩年風頭正猛,但大都聚焦於車輛軌跡預測方向,自動駕駛之心今天就為大家分享頂會NeurIPS上關於行人軌跡預測的演算法—SHENet,在受限場景中人類的移動模式通常在一定程度上符合有限的規律。基於這個假設,SHENet透過學習隱含的場景規律來預測一個人的未來軌跡。文章已經授權自動駕駛之心原創!作者的個人理解由於人類運動的隨機性和主觀性,目前預測一個人的未來軌跡仍然是一個具有挑戰性的問題。然而,由於場景限制(例如平面圖、道路和障礙物)以及人與人或人與物體的互動性,在受限場景中人類的移動模式通
 GR-1傅利葉智慧通用人形機器人即將開始預售!
Sep 27, 2023 pm 08:41 PM
GR-1傅利葉智慧通用人形機器人即將開始預售!
Sep 27, 2023 pm 08:41 PM
身高1.65米,體重55公斤,全身44個自由度,能夠快速行走、敏捷避障、穩健上下坡、抗衝擊幹擾的人形機器人,現在可以帶回家了!傅利葉智慧的通用人形機器人GR-1已開啟預售機器人大講堂傅利葉智慧FourierGR-1通用人形機器人現已開放預售。 GR-1擁有高度仿生的軀幹構型和擬人化的運動控制,全身44個自由度,具備行走、避障、越障、上下坡、抗干擾、適應不同路面等運動能力,是通用人工智慧的理想載體。官網預售頁:www.fftai.cn/order#FourierGR-1#傅利葉智能需要改寫的內
 你知道程式設計師再過幾年會沒落?
Nov 08, 2023 am 11:17 AM
你知道程式設計師再過幾年會沒落?
Nov 08, 2023 am 11:17 AM
《ComputerWorld》雜誌曾經寫過一篇文章,說“編程到1960年就會消失”,因為IBM開發了一種新語言FORTRAN,這種新語言可以讓工程師寫出他們所需的數學公式,然後提交給電腦運行,所以程式設計就會終結。圖片又過了幾年,我們聽到了一種新說法:任何業務人員都可以使用業務術語來描述自己的問題,告訴電腦要做什麼,使用這種叫做COBOL的程式語言,公司不再需要程式設計師了。後來,據說IBM開發了一門名為RPG的新程式語言,可以讓員工填寫表格並產生報告,因此大部分企業的程式設計需求都可以透過它來完成圖
 華為將在智慧穿戴領域推出玄璣感知系統 可根據心率評估用戶情緒狀態
Aug 29, 2024 pm 03:30 PM
華為將在智慧穿戴領域推出玄璣感知系統 可根據心率評估用戶情緒狀態
Aug 29, 2024 pm 03:30 PM
近日,華為宣布將於9月推出搭載玄璣感知系統的全新智慧穿戴新品,預計為華為的最新智慧手錶。該新品將整合先進的情緒健康監測功能,玄璣感知系統以其六大特性——準確性、全面性、快速性、靈活性、開放性和延展性——為用戶提供全方位的健康評估。系統採用超感知模組,優化了多通道光路架構技術,大幅提升了心率、血氧和呼吸速率等基礎指標的監測精度。此外,玄璣感知系統也拓展了以心率資料為基礎的情緒狀態研究,不僅限於生理指標,還能評估使用者的情緒狀態和壓力水平,並支持超過60項運動健康指標監測,涵蓋心血管、呼吸、神經、內分泌、
 我的智慧手錶無法開啟:現在該怎麼辦
Aug 23, 2023 pm 05:41 PM
我的智慧手錶無法開啟:現在該怎麼辦
Aug 23, 2023 pm 05:41 PM
如果您的智慧手錶無法開機怎麼辦?以下是可用於恢復您心愛的智慧手錶壽命的選項。檢查電源播放:想像一下,一個星光熠熠的舞台,您的智慧手錶作為頭條新聞,但窗簾沒有升起,因為它忘記了電池!在我們深入研究細節之前,請確保您的智慧型手錶不只是在煙霧中運行。給它一個適當的充電時間,如果你覺得有點額外,給它一個時尚的新電纜——時尚前衛的那種!神奇的重啟:如有疑問,請給它一點R&R——那就是重啟和復興!按住這些按鈕,就像指揮交響樂的大師一樣。不同的智慧手錶都有自己的重啟儀式——Google是你的指南。這是一
 Google具身智能新研究:比RT-2優秀的RT-H來了
Mar 11, 2024 pm 01:10 PM
Google具身智能新研究:比RT-2優秀的RT-H來了
Mar 11, 2024 pm 01:10 PM
隨著大型語言模型如GPT-4與機器人技術的結合日益緊密,人工智慧正逐漸走向現實世界。因此,與具身智能相關的研究也引起越來越多的關注。在許多研究計畫中,Google的"RT"系列機器人一直處於前沿地位,這一趨勢在近期開始加速(詳見《大模型正在重構機器人,GoogleDeepmind如何定義未來的具身智慧》)。去年7月,GoogleDeepMind推出了RT-2,這是全球第一個能夠控制機器人進行視覺-語言-動作(VLA)互動的模型。只要用對話的方式下達指令,RT-2就能在大量圖片中辨識出黴黴,並將一罐可樂送到她手中。如今,
