

普遍研究自動停車,整合產業標準、趨勢評估和系統介紹

寫在前面
自動停車系統是指車輛在無人工幹預的情況下,能夠自主尋找停車位並完成準確的泊車,同時也可以根據用戶需求移動到指定位置。這項技術的成熟將極大地緩解人們在泊車過程中的不便,例如長時間尋找停車位浪費時間,以及在尋找停車位時可能出現的車輛碰撞和摩擦等安全問題。
目前,許多科技公司和大學實驗室正在探索自動停車領域。賓士、博世等公司已建立泊車基礎設施,NVIDIA正在開發停車場自動駕駛演算法和停車位偵測方法,BMW也將自動泊車模組安裝在生產車輛上。
考慮到自動停車技術在業界的廣泛需求,我們對自動停車系統的發展狀態進行系統性的研究。包括自動停車系統的產業標準趨勢、效能評測指標、自動停車系統各個子模組設計到的技術等。
目前自動停車產業的標準趨勢
由於目前自動停車系統受到了來自工業界和學術界的廣泛關注,各國和公司都在不斷的開發自動停車技術。所以對於制定自動停車技術的標準就變的格外重要。目前已經制定的技術標準包括地理資訊、室外定位、室內空間定位、停車標準以及車輛通訊標準幾個方面的內容,具體標準匯總在如下的表格中。
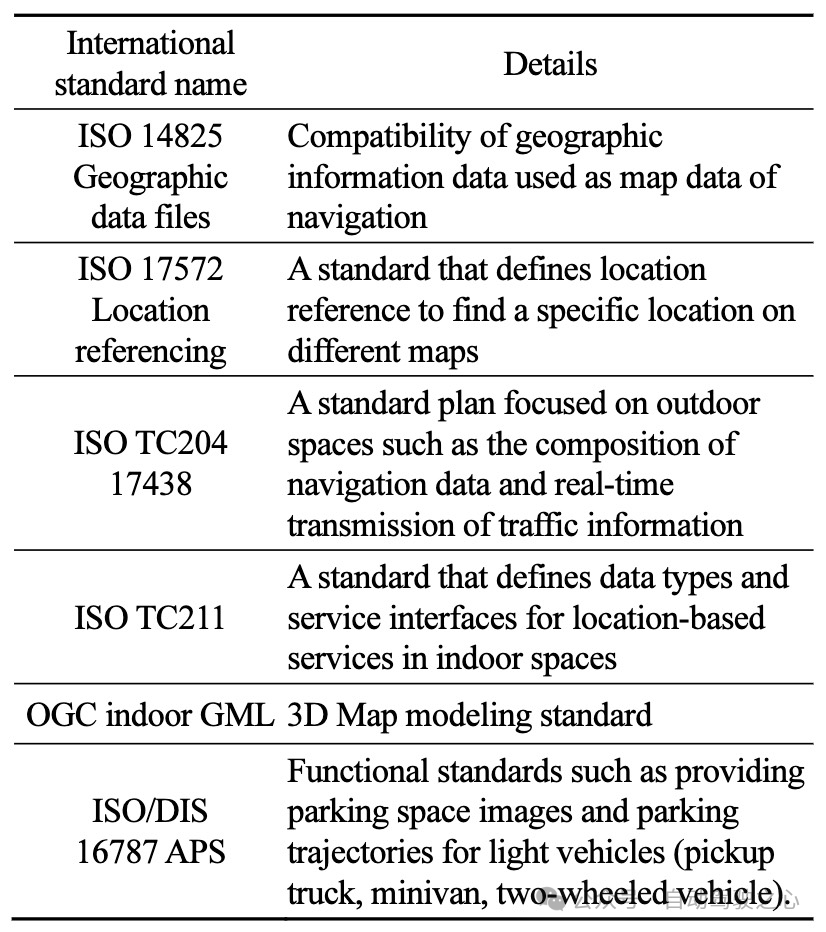
自動泊車行業的相關標準
- 地理資訊和定位標準為室外空間的命名、定義和格式建立了原則和依據,此類標準包括ISO 14825、ISO 17572 和ISO TC204 177438等。
- 室內空間定位的標準化也在製定當中,包括ISO TC211以及OGC標準。
- ISO/DIS 16787 APS停車標準提出了停車所需的資訊類型,並定義了控制車輛的技術名稱。此外,該標準還定義了實施輔助停車系統所需的功能以及執行車輛的轉向控制功能。
自動停車系統的評測標準
目前自動停車系統的評測包括兩部分,分別是自動駕駛部分的評測以及自動停車部分的評測。
自動駕駛部分的評測標準
自動駕駛技術的評測遵循汽車工程協會所製定的「自動駕駛技術階段」標準,該標準將自動駕駛技術分為六個層級,依技術水準、控制主體和驅動能力進行分類。為了更方便地評估各個層級,在研發中的ISO/WD 34501和ISO/WD 34502標準被提出。 ISO/WD 34501標準適用於第三級系統中測試場景的術語和定義,而ISO/WD 34502標準則提供了測試場景的指南和安全評估過程。這些標準的製定旨在為自動駕駛技術的開發和應用提供統一的評測準則,推動自動駕駛技術的發展。
自動泊車部分的評測標準
儘管自動停車技術目前備受關注,但國際標準的製定仍處於初級階段。與自動駕駛評測標準不同,自動泊車的技術水準主要依賴開發人員的評估標準來衡量。
下表展示了交通狀況場景系統中自主停車場景的範例,停車場景根據性能等級劃分。
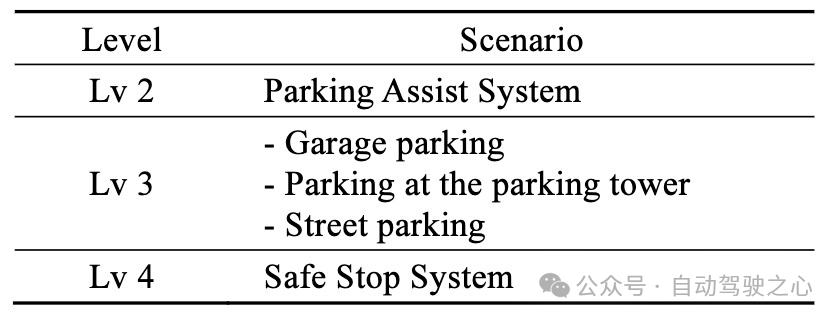
自動停車等級劃分
在交通狀況場景系統評估包括自動駕駛和停車兩部分場景,並且使用汽車工程協會定義的「自動駕駛技術階段「來指出自動泊車的能力。目前該系統當中包含三個層級。
- 第二級(Lv2):稱為停車輔助系統用來幫助人們更方便的停車。在Lv2級別中,通常車輛會配有障礙物距離預警系統以及後視相機。
- 第三級(Lv3):Lv3等級可以實現指定場景下的自動泊車。例如在車庫停車的這一類簡單的停車場景。
- 第四級(Lv4):Lv4層級中可以執行Lv3層級中的所有場景。除此之外,當車輛遇到障礙物的時候,車輛可以在停止或避開障礙物後返回目的地。
自動停車系統詳解
目前自動停車系統當中主要包括三部分的內容,如下圖所示,分別是搜索駕駛過程,自動停車過程以及返回駕駛過程。我們先對每個過程做一個大致的介紹,然後再介紹每個過程目前各自的發展趨勢。
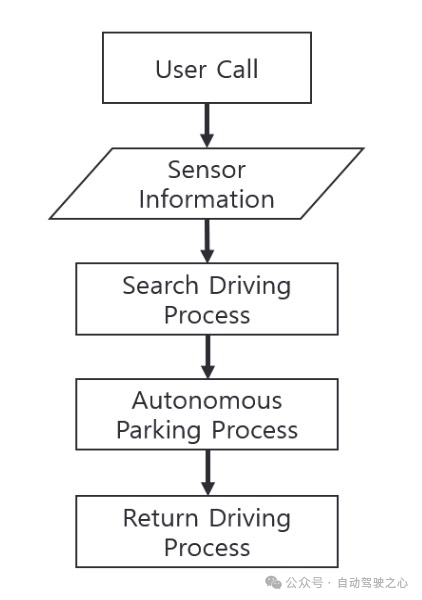
自動停車系統的工作流程
搜尋駕駛流程
##搜尋駕駛過程的最終目標就是在停車場當中汽車可以自主的找到一個停車位,所以該過程需要用到定位、防撞以及停車位檢測技術。
定位技術介紹
在自動停車系統當中,可以使用GPS或車輛自帶的IMU感測器來確認車輛的速度和姿態並且修正車輛的位置估計誤差。但是在某些室內場景,是無法接收GPS訊號的。所以自動駕駛車輛就需要配備相機、光達以及毫米波雷達進行輔助。下圖是車輛上配備的一些感測器資訊的介紹。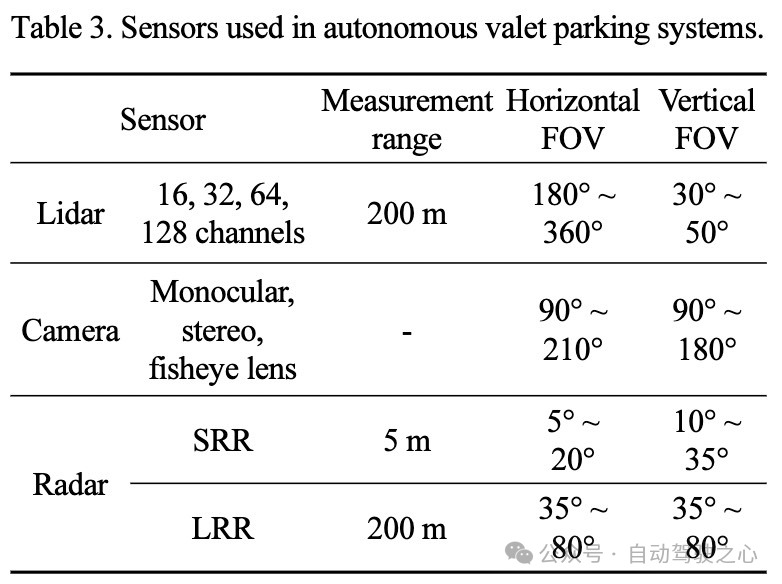
- 雷射雷達感測器使用雷射來偵測物體。現在主要流行的光達主要分為16、32、64和128線的光達。其測量範圍約200米,垂直視場為30到50度。
- 相機感光元件則可以大致分成單目、雙眼以及魚眼類型。通常自動駕駛車輛配備的相機其水平視野為90到210度,垂直視野為90到180度。
- 毫米波雷達根據距離可以分割成短程雷達和長距雷達。其中,短程雷達的範圍大約到5米,水平視場為5到20度,垂直視場為10到35度。長距雷達的範圍大約可以到200米,水平和垂直視場為35到80度。
- 直接建圖法:追蹤感測器移動時變化的資料的強度來估計感測器的姿態。但由於該類方法容易受到光照變化的影響,無法實現重定位,導致目前的建圖方法很少基於此類方法。
- 基於特徵的建圖法:此類別方法首先從感測器資訊中獲得周圍物體的特徵點。從同一物件接收到的特徵點投影到兩個不同的感測器座標,透過計算投影點的幾何關係來估計目標的位置。
防撞技術介紹
由於自動停車系統的主要應用場景是在停車場,而停車場中會停有很多車輛,所以防碰撞技術非常重要。在防碰撞技術中,主要會使用超音波感測器、短波雷達感測器、雷射雷達感測器以及相機感測器。聲波以及雷達感測器主要是用來實現準確的測距。相機感測器主要是利用同一物體在連續影像中位置的差異來估計深度上的距離。
停車位偵測技術
停車位偵測是在搜尋駕駛的過程中不斷執行的,通常會包括傳統的電腦視覺、深度學習以及兩種方法的混合實作。 傳統的電腦視覺主要是指定和識別停車位的形狀,如車位線檢測以及特徵點檢測,如下圖所示。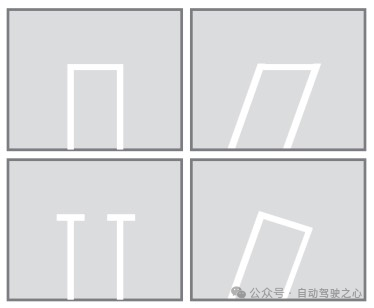
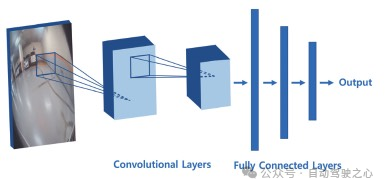
#自動停車流程##如果上一步的搜尋駕駛過程找到了可用的停車位後,系統就會呼叫自動停車過程。一般來說,我們會使用路徑生成方法來實現自主停車過程。目前主流的路徑生成方法主要有基於演算法的方法以及基於強化學習的方法。
基於演算法的方法涉及計算停車位的位置和形狀的路徑以及車輛的當前位置。演算法為了計算出合適的停車路徑會涉及最優控制問題、基於網格的路徑規劃方法以及快速探索隨機樹等演算法。
基於強化學習的方法可以為自動停車模擬器中的自主停車過程產生最佳路徑。在自動泊車模擬器中,車輛會學習一個通用的停車過程。此學習方法透過重複路徑的生成過程和評估來持續獲得停車精度最高的最優路徑,如下圖所示。
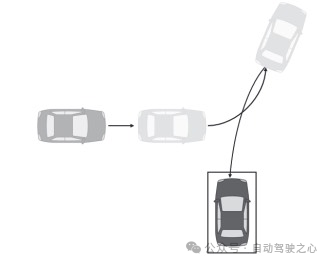
自動停車的反向停車過程
返回駕駛過程
返回駕駛過程是指在自動駕駛車輛駛入停車位等待的時候,使用者可以對車輛進行調用,使其移動到使用者指定好的地方。在這個過程當中,我們需要使用到路徑追蹤技術。
目前而言,路徑追蹤技術包括追蹤行進路徑的方法以及追蹤修改路徑的方法。但這兩種方法都使用了類似的車輛控制演算法,具體可以參考論文【1-2】。其大致思路就是在考慮車輛目前位置和轉向角條件的情況下,執行沿著生成路徑移動車輛的控制指令。
結論
由於目前自動停車技術的需求逐漸增加,各國和廠商都在大力發展自動停車系統。考慮到自動停車技術的快速發展,在這篇文章中,我們總結了自動泊車系統當中的標準化趨勢、評測標準以及自動泊車各個組成系統的進行詳細的介紹,希望可以給大家帶來幫助~

原文連結:https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q
#以上是普遍研究自動停車,整合產業標準、趨勢評估和系統介紹的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 I7-14650HX評測跑分參數詳細介紹
Feb 28, 2024 pm 02:00 PM
I7-14650HX評測跑分參數詳細介紹
Feb 28, 2024 pm 02:00 PM
I7-14650HX是今年最新推出的顯示卡,這款顯示卡處理器應用的能力十分的優秀,而且為8大核加上12小核的配置,達到了最高的頻率,下面我們就一起來看一下吧。 I7-14650HX評測:1、i7-14650HX處理器規格為8大核心+8小核,在測試中其頻率可高達5181MHz。此款處理器相較於現有的i7-13650HX增加2個大核,達到了目前的i7-13700HX核心配置,頻率亦有提升。 2.英特爾i7-14700HX行動處理器也已揭曉,現為8大核心+12小核心配置,而在測試中到達了5462MHz的最高頻率。 3
 I7-14700HX評測跑分參數詳細介紹
Feb 26, 2024 pm 04:55 PM
I7-14700HX評測跑分參數詳細介紹
Feb 26, 2024 pm 04:55 PM
I7-14700HX是一款十分不錯的優秀的處理器,擁有強大的20核28線程的設計,以確保極致的遊戲性能表現,下面我們一起來看一下這款顯卡的性能如何吧。 I7-14700HX評測:1、採用Intel7高級性能工藝技術,這款產品具有20核28線程的強大設計,理論上單核最高睿頻可達5.5GHz,這無疑增強了它在多任務處理和遊戲性能方面的表現。 2.配備最新發表的第14代Intel酷睿i7-14700HX處理器,同樣立基於Intel7高性能製程技術平台。 3.處理器採用顛覆性AdaLovelace架構,搭載
 R9-7940HX評測跑分參數介紹
Feb 25, 2024 pm 09:16 PM
R9-7940HX評測跑分參數介紹
Feb 25, 2024 pm 09:16 PM
向您推薦一款叫做銳龍97940HX的神秘處理器,這正是造就了7040產品閃耀輝煌的幕後英雄。事實上它可以被視為銳龍97945HX的降頻版本,如果對其詳盡如絲的技術資訊感興趣的話,請參考下列所提供的寶貴資料哦! R9-7940HX評測:1、搭載前緣的5nm製程製程及先進的Zen4CPU架構,您也可選擇支援潮流的PCIe5.0標準。 2.儘管銳龍97940HX在單核心處理能力方面與大哥級產品7945HX尚存在差距,然而依然超越了鳳凰平台的卓爾不凡的R97940H處理器。 3.這款強大的處理器具有多達16個核心
 R9-7945HX評測跑分參數介紹
Feb 25, 2024 pm 04:50 PM
R9-7945HX評測跑分參數介紹
Feb 25, 2024 pm 04:50 PM
R9-7945HX无疑是AMD公司倾力打造的一款卓越性能CPU,它被广泛应用于各种高端游戏笔记本以及高性能轻薄型电脑产品中。那么,究竟R9-7945HX表现如何呢?接下来由我为您详细解读。R9-7945HX评测:1、作为新款1/i9系列中的明星产品,14900HX的最高睿频预计将跃升至惊人的5.8GHz,这无疑又一次刷新了处理器频率的世界纪录。2、在此次改进中,英特尔公司为全新的i9-14900HX处理器在核芯数量、线程处理能力以及缓存内存容量等多方面均实现了显著提升,具有更强的多任务处理能力和
 I9-14900HX評測跑分參數介紹
Feb 25, 2024 pm 04:40 PM
I9-14900HX評測跑分參數介紹
Feb 25, 2024 pm 04:40 PM
頗具神秘色彩的英特爾第十四代行動版本i9-14900HX處理器已經悄悄現身,成為了筆記型電腦處理器領域新的高峰。在此之際,相信有許多用戶對這款性能卓著的中央處理單元(CPU)並未能全面深入地了解,故此向各位尊貴的用戶獻上一份精細而簡要的介紹。 I9-14900HX評測:1、作為新款1/i9系列中的明星產品,14900HX的最高睿頻預計將躍升至驚人的5.8GHz,這無疑又一次刷新了處理器頻率的世界紀錄。 2、在此次改進中,英特爾公司為全新的i9-14900HX處理器在核芯數量、線程處理能力以及緩存內存
 R9-7845HX評測跑分參數詳細介紹
Feb 27, 2024 am 09:58 AM
R9-7845HX評測跑分參數詳細介紹
Feb 27, 2024 am 09:58 AM
R9-7845HX是一款十分優秀的顯示卡,解析度也是達到了2k,而且支援240hz的刷新,遊戲的體驗也是十分的棒,下面我們一起來看一下R9-7845HX詳細測評吧。 R9-7845HX評測:1、R97845hx處理器擁有核心數12核心、線程數24線程,基本頻率為3.00GHz,睿頻可達5.20GHz,其熱設計功耗(TDP)為55W。 2.此處理器搭載的核顯為AMDRadeon610M,其顯示卡基本頻率為0.40GHz,加速頻率可達2.20GHz。 3.與ZEN3架構的R77735H相比,R97845hx在R
 雲鯨智慧洗地機S1體驗:非萬能也不完美,但真的超實用啊!
Jan 12, 2024 pm 01:06 PM
雲鯨智慧洗地機S1體驗:非萬能也不完美,但真的超實用啊!
Jan 12, 2024 pm 01:06 PM
不知從什麼時候開始,我越來越懶得打掃家中了。在剛參加工作時,我每天晚上回到家中都會抽個十幾分鐘掃掃地上的灰塵,擦擦這擦擦那,覺得只有乾淨的環境住起來才舒服。但隨著時間的推移我的惰性越來越強,別說天天打掃了,就連看到垃圾掉在地上都懶得撿起來,久而久之我的房間變得越來越雜亂,還因此被房東罵了幾次。正當我糾結於掃還是不掃的難題時,雷科技突然收到了雲鯨的新品——雲鯨智能洗地機S1,作為全公司最需要這類產品的人,我當然是第一時間就把它帶回了家,在使用了三天后,我決定暫時性「徵用」一段時間。夠小不佔地,足夠
 I7-13700HX評測跑分參數詳細介紹
Feb 26, 2024 pm 04:50 PM
I7-13700HX評測跑分參數詳細介紹
Feb 26, 2024 pm 04:50 PM
I7-13700HX是最新的英特尔处理器,而且采用了改良款的硬件线程调度器,对于游戏性能有着更好要求的玩家非常友好,下面我们一起来看一下这款处理器具体内容吧。I7-13700HX评测1、该处理器的性能远超H系列标压处理器,包括最新的i9-13900H,甚至连上一代中最常见的i7-12700H都比不上它。2、其多核心得分为20682,单核心得分为1894。与i7-12700H相比,多核性能提升约35%,单核性能提升约25%,进步显著。3、从数据来看,i7-13700H可释放2069-2456cb的
