

學習Python中A*演算法實現的詳細步驟

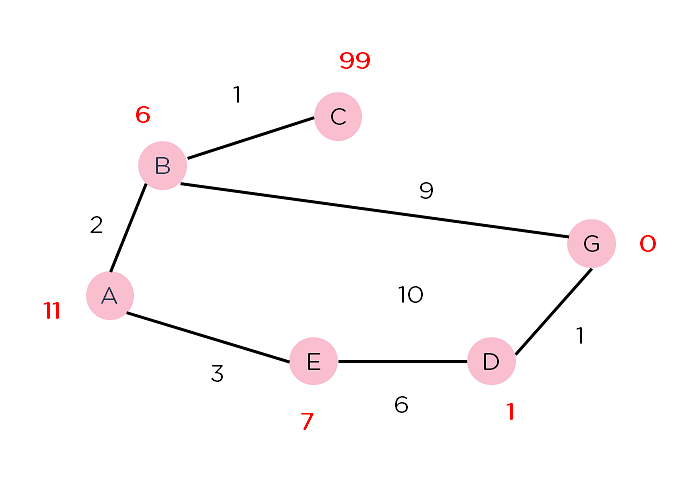
以此加权图为例,用Python实现A*算法。加权图中的节点用粉红色圆圈表示,并且给出了沿节点的路径的权重。节点上方的数字代表节点的启发式值。
首先为算法创建类。一个用于存储与起始节点的距离,另一个用于存储父节点。并将它们初始化为0,以及起始节点。
def aStarAlgo(start_node,stop_node):
open_set=set(start_node)
closed_set=set()
g={}
parents={}
g[start_node]=0
parents[start_node]=start_node找到具有最低f(n)值的相邻节点,针对到达目标节点的条件进行编码。如果不是这种情况,则将当前节点放入打开列表中,并设置其父节点。
While len(open_set)>0: n=None for v in open_set: if n==None or g[v]+heuristic(v)<g[n]+heuristic(n): n=v if n==stop_node or Graph_nodes[n]==None: pass else: for(m,weight)in get_neighbors(n): if m not in open_set and m not in closed_set: open_set.add(m) parents[m]=n g[m]=g[n]+weight
如果相邻的g值低于当前节点并且在封闭列表中,则将其替换为这个新节点作为父节点。
else: if g[m]>g[n]+weight: g[m]=g[n]+weight parents[m]=n if m in closed_set: closed_set.remove(m) open_set.add(m)
如果当前g低于前一个g,并且其相邻在open list中,则将其替换为较低的g值,并将相邻的parent更改为当前节点。
如果不在两个列表中,则将其添加到打开列表并设置其g值。
if n==None:
print('Path does not exist!')
return None
if n==stop_node:
path=[]
while parents[n]!=n:
path.append(n)
n=parents[n]
path.append(start_node)
path.reverse()
print('Path found:{}'.format(path))
return path
open_set.remove(n)
closed_set.add(n)
print('Path does not exist!')
return None现在,定义一个函数来返回相邻节点及其距离。
def get_neighbors(v): if v in Graph_nodes: return Graph_nodes[v] else: return None
此外,创建一个函数来检查启发式值。
def heuristic(n):
H_dist={
'A':11,
'B':6,
'C':99,
'D':1,
'E':7,
'G':0,
}
return H_dist[n]描述一下图表并调用A*函数。
Graph_nodes={
'A':[('B',2),('E',3)],
'B':[('C',1),('G',9)],
'C':Node,
'E':[('D',6)],
'D':[('G',1)],
}
aStarAlgo('A','G')算法遍历图,找到代价最小的路径。
这是通过E => D => G。
以上是學習Python中A*演算法實現的詳細步驟的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)
熱門話題



 如何解決Linux終端中查看Python版本時遇到的權限問題?
Apr 01, 2025 pm 05:09 PM
如何解決Linux終端中查看Python版本時遇到的權限問題?
Apr 01, 2025 pm 05:09 PM
Linux終端中查看Python版本時遇到權限問題的解決方法當你在Linux終端中嘗試查看Python的版本時,輸入python...
 在Python中如何高效地將一個DataFrame的整列複製到另一個結構不同的DataFrame中?
Apr 01, 2025 pm 11:15 PM
在Python中如何高效地將一個DataFrame的整列複製到另一個結構不同的DataFrame中?
Apr 01, 2025 pm 11:15 PM
在使用Python的pandas庫時,如何在兩個結構不同的DataFrame之間進行整列複製是一個常見的問題。假設我們有兩個Dat...
 如何在10小時內通過項目和問題驅動的方式教計算機小白編程基礎?
Apr 02, 2025 am 07:18 AM
如何在10小時內通過項目和問題驅動的方式教計算機小白編程基礎?
Apr 02, 2025 am 07:18 AM
如何在10小時內教計算機小白編程基礎?如果你只有10個小時來教計算機小白一些編程知識,你會選擇教些什麼�...
 如何在使用 Fiddler Everywhere 進行中間人讀取時避免被瀏覽器檢測到?
Apr 02, 2025 am 07:15 AM
如何在使用 Fiddler Everywhere 進行中間人讀取時避免被瀏覽器檢測到?
Apr 02, 2025 am 07:15 AM
使用FiddlerEverywhere進行中間人讀取時如何避免被檢測到當你使用FiddlerEverywhere...
 Uvicorn是如何在沒有serve_forever()的情況下持續監聽HTTP請求的?
Apr 01, 2025 pm 10:51 PM
Uvicorn是如何在沒有serve_forever()的情況下持續監聽HTTP請求的?
Apr 01, 2025 pm 10:51 PM
Uvicorn是如何持續監聽HTTP請求的? Uvicorn是一個基於ASGI的輕量級Web服務器,其核心功能之一便是監聽HTTP請求並進�...
 哪些流行的Python庫及其用途?
Mar 21, 2025 pm 06:46 PM
哪些流行的Python庫及其用途?
Mar 21, 2025 pm 06:46 PM
本文討論了諸如Numpy,Pandas,Matplotlib,Scikit-Learn,Tensorflow,Tensorflow,Django,Blask和請求等流行的Python庫,並詳細介紹了它們在科學計算,數據分析,可視化,機器學習,網絡開發和H中的用途
 Python中如何通過字符串動態創建對象並調用其方法?
Apr 01, 2025 pm 11:18 PM
Python中如何通過字符串動態創建對象並調用其方法?
Apr 01, 2025 pm 11:18 PM
在Python中,如何通過字符串動態創建對象並調用其方法?這是一個常見的編程需求,尤其在需要根據配置或運行...
