

雲端車端MapNeXt全搞定!面向下一代線上高精地圖構建

寫在前面&筆者的個人理解
在協作、互聯和自動化移動(CCAM)中,智慧駕駛車輛對周圍環境的感知、建模和分析能力越強,它們就越能意識到並能夠理解、做出決策,以及安全且有效率地執行複雜的駕駛場景。高精(HD)地圖以厘米級精度和車道級語義資訊表示道路環境,使其成為智慧移動系統的核心組件,也是CCAM技術的關鍵推動者。這些地圖為自動化車輛提供了了解周圍環境的強大優勢。高精地圖也被視為隱藏的或虛擬的感測器,因為它匯集了來自實體感測器的知識(地圖),即雷射雷達、相機、GPS和IMU,以建立道路環境的模型。高精地圖正在迅速向智慧城市數位基礎設施的整體表示發展,不僅包括道路幾何形狀和語義訊息,還包括道路參與者的即時感知、天氣狀況、工作區域和事故的更新。大規模部署自動駕駛汽車需要由龐大的車隊來建造和維護這些地圖,這些車隊協同工作,不斷更新地圖,使車隊中的自動駕駛汽車能夠正常工作。本文對這些地圖在高度自動駕駛(AD)系統中的各種應用進行了廣泛的綜述。我們系統回顧了建構和維護高精地圖的不同方法和演算法的最新進展。此外也討論並綜合了高精地圖分發的數據、通訊和基礎設施需求。最後回顧了當前的挑戰,並討論了下一代數位地圖系統的未來研究方向。
高精地圖發展歷史
#A.數位地圖
現代衛星系統和影像技術的出現徹底改變了對世界精確而詳細的數位表示的創建,產生了我們現在所說的數位地圖,如Google地圖、OpenStreetMap、蘋果地圖、Garmin和Mapbox。數位地圖對道路結構和基本語義資訊以及興趣點(POI)進行編碼。有幾種方法和技術可以從衛星影像中提取和識別建立這些地圖所需的地理特徵。數位地圖現在是我們日常生活中必不可少的工具,尤其是與GPS整合時。事實上,這種整合一直是建立大量數位服務的核心組成部分,最重要的是導航和路由。這些地圖主要是為了幫助人類而開發的,現在可以在最新的車輛中使用,以幫助人類駕駛員。然而,這些地圖的準確性和精度以及AD要求的更新時間有限,其中車輛需要一定程度的位置精度以及詳細的車道等級資訊。
B.增強數位地圖
數位地圖已顯著改進,以滿足高級駕駛員輔助系統(ADAS)功能的要求,如車道維持輔助和自適應巡航控制(ACC)。這些增強型數位地圖中的典型特徵包括速度限制、道路曲率和坡度、車道資訊以及交通標誌和紅綠燈。增強型數位地圖也稱為ADAS地圖,目前是大多數現代車輛不可或缺的一部分,可實現ADAS功能。儘管增強型數位地圖引入了車道級信息,但其幾何精度和語義細節水平限制了其在更高自主水平上的適用性。在AD系統中,車輛被要求相對於其環境進行高精度定位,了解當前情況,並規劃無碰撞軌跡。為了達到這個自主水平,自動化車輛不僅需要獲得具有公分級位置精度和車道級幾何資訊的地圖,還需要獲得環境的3D模型,以及道路環境的所有靜態和動態特徵。
C.高精地圖
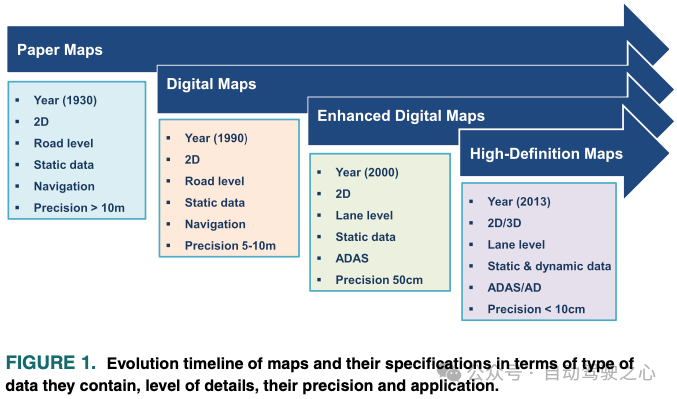
需要產生高精地圖,或稱為高精地圖,以滿足上述要求。圖1展示了地圖的演變、特徵和用途,以及包含的資訊、精確度和細節程度。
D.可擴展地圖:概述
在過去的十年裡,學術界和工業界都透過巨大的研究和開發努力,將高精地圖的極限推向了價格合理、自我維護和可擴展的程度。然而,按比例建立高精地圖仍然存在一些懸而未決的問題,這些問題阻礙了高精地圖在實現自主移動方面的全部潛力和最終目標。這些挑戰可以分為以下幾類。
- 1)資料收集:高精地圖的資料收集可能是一個耗時且勞力密集的過程。它通常包括使用GPS、IMU、光達和相機等感測器的組合來收集有關環境的詳細資訊。
- 2)資料通訊:資料通訊包括將地圖資料從收集地傳輸到處理地以建立高精地圖,最後傳輸到消費地,例如自動駕駛汽車。測繪車輛從不同的感測器產生大量數據,需要對這些數據進行處理以建立和更新地圖。即時處理大量測繪車輛的這些數據確實是一個挑戰。
- 3)資料處理:資料處理是透過擷取建構高精地圖所需的元素和特徵來創建高精地圖的步驟。這可能是一項非常複雜的任務,尤其是對於大型地圖,因為它涉及聚合和對齊來自多個來源的數據,並確保地圖準確和最新。在地圖繪製過程中涉及大量地圖繪製車輛的情況下,必須確保精確的時間同步,以避免資料錯位。使用GPS產生的每秒脈衝(PPS)訊號進行同步往往是使所有車載感測器同步最常見的方法。
- 4)地圖維護:地圖維護是指根據道路環境的變化,如建築工地、道路堵塞和道路連接的修改,不斷更新高精地圖的過程。由於道路環境是高度動態的,並且會發生變化,因此這個過程需要頻繁的資料收集和處理工作。
- 5)資料隱私與安全:資料安全和隱私對高精地圖至關重要,因為它們通常包含敏感信息,如建築物和基礎設施的位置。確保這些數據得到保護而不被濫用是一項重大挑戰。
- 6)建圖成本:在創建高精地圖的過程中,地圖成本是重要因素。大規模繪製地圖需要使用大量的測繪車,每輛車都配備了一套昂貴的具有高精度感測器的測繪設備。在繪製大面積地圖時,此成本變得非常重要。使用消費級感測器進行高精地圖繪製是可能的,但這是以使用複雜的地圖繪製演算法為代價的。
E.主要貢獻
本文對高精地圖進行了深入的概述,包括其分層架構的統一模型。同時,強調了高精地圖在模組化AD系統中的重要性,並綜合了它們在各種AD核心功能中的使用方式。在地圖資料收集、通訊、處理、安全和成本方面面臨的挑戰上,本文進行了廣泛回顧,包括成本效益高的解決方案以及從生成到分發的通訊和地圖資料需求。此外,也探討了目前建置和維護高精地圖面臨的挑戰。最後,為未來和下一代行動高精地圖提供了一些啟示。總結主要貢獻如下:
- 高精地圖的獨立概覽,作為更廣泛的智慧交通系統社群的背景。
- 詳細回顧高精地圖在AD系統的各種核心功能中所使用的最先進技術。
- 全面調查不同的方法、方法和演算法,以維護不同層次的高精地圖並使其保持最新。
- 討論綜合行政管理及其他面向高精地圖的主要挑戰和未來前景。
高精地圖:概述
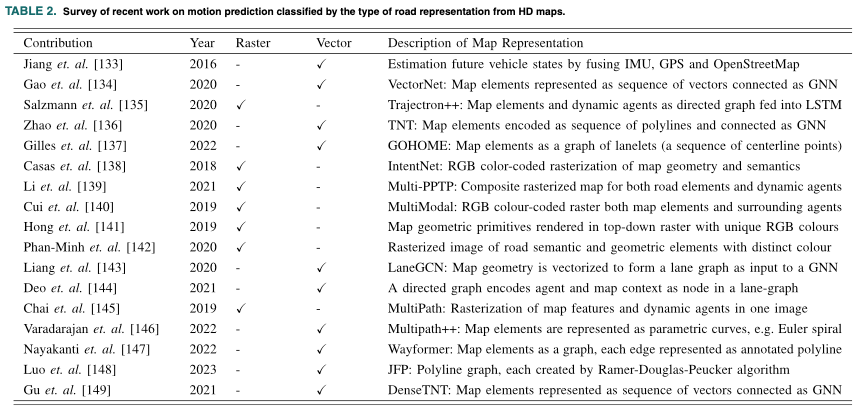
早期的高精地圖只是ADAS中使用的增強數位地圖的擴展,它們被稱為早期的地圖。 HD地圖一詞是最近才出現的,但現在已被CCAM行業廣泛接受,包括一級汽車公司、地圖提供商和原始設備製造商。高精地圖封裝了自動化車輛的所有必要信息,以非常高的精度了解駕駛環境。雖然人們普遍認為高精地圖是CCAM的核心推動者,但對於什麼訊息構成高精地圖以及如何表示這些訊息,沒有明確的指導方針或標準。儘管如此,市面上可用的高精地圖具有共同的功能。厘米級的位置精度以及車道級幾何和語義資訊的可用性是大多數高精地圖中的基本特徵。在最基本的層面上,高精地圖可以簡單地是一組點和線段,其確切位置代表路標、車道標記、車道邊界和車道分隔符號。由於AD系統的要求,今天的高精地圖變得越來越複雜,來自不同來源的數據構成了關於駕駛環境的多層資訊。將高精地圖分解為多個圖層可以使道路環境具有更結構化的資料表示。這有助於AD系統的不同組件的可訪問性,這需要在不同的細節層級對環境進行建模。此外,分層資料表示使地圖的建置、儲存、檢索和維護變得容易。圖2中給出了這些分層的範例。
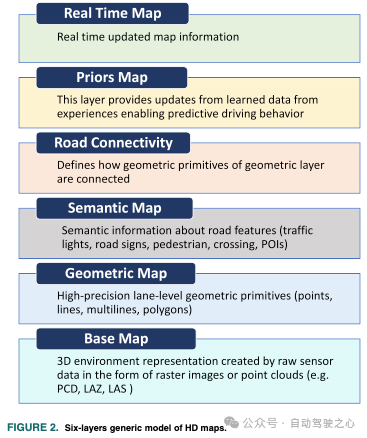
如上所述,有幾種方式來表示AD系統中使用的地圖信息,包括車道級別的細節,例如車道邊界、車道標記類型、交通方向、人行橫道、可駕駛區域多邊形和交叉口註釋。儘管駕駛環境是高度動態的,但這三層中表示的數據是靜態的。環境的整體表示還應包括關於觀測速度、天氣條件、擁擠區、道路阻塞區(施工)等的即時交通資訊。本節試圖以統一的方式提供儲存在這些層中的資訊的全域概覽。儘管大多數高精地圖提供者都有自己的定義和格式,而且高精地圖還沒有唯一的標準,但我們將高精地圖中包含的資訊分為六個不同的層,如圖2所示。
A.基礎地圖圖層
#基礎地圖圖層是HD地圖的基礎,並被視為建構所有其他圖層的參考層。它包含環境的高度精確的三維地理空間表示,例如道路、建築物和其他結構的位置和形狀。道路環境的三維地理空間模型正成為自動駕駛汽車的重要資訊來源。現在,HD地圖通常包含環境的三維表示。基本地圖圖層通常使用來自雷射雷達的點雲和/或來自一個或多個相機的影像創建,有時藉助GPS/IMU。這套感測器構成了一個MMS,可以創造一個高度準確和詳細的代表環境的3D點雲。從該層提取道路和車道的幾何和語義特徵,以建立HD地圖中的其他層。由於該層包含環境的密集數據表示,因此它在自動駕駛汽車的精確定位中發揮著至關重要的作用。點雲配準的幾種技術允許透過將原始感測器資料與該層的點雲相匹配來估計車輛姿態。就資料處理和通訊需求而言,建置和更新該層具有挑戰性。
B.幾何地圖圖層
儘管基礎地圖圖層對環境的表示精確而密集,但由於其表示中缺乏有意義的特徵,其支持理解環境的能力有限。 HD地圖中的幾何圖層提供了有關道路環境幾何圖形的詳細信息,包括道路、車道、路緣石和其他特徵的位置和形狀。幾何層通常包括有關道路寬度、車道數量、每條車道的中心線、每條道路中車道的邊界以及路面高程的資訊。它還包括有關路緣石、人行道、人行橫道以及垂直和水平交通標誌的精確位置和形狀的資訊。這些特徵中的每一個都以基本的幾何圖元表示,即點、線、多線和多邊形。例如,垂直交通標誌的位置可以用一個點來表示。車道中心線或邊界可以由一組相互連接的線段表示,例如多線。類似地,行人穿越道可以用多邊形表示。此圖層的幾何特徵是透過處理基礎地圖圖層的資料來創建的。根據基礎地圖資料建立幾何層通常涉及幾個處理步驟,包括道路分割、車道資訊提取、路標、桿、交通標誌、路緣石、障礙物和路面特徵。該層提供了道路特徵的高度準確的車道級幾何表示。 HD地圖中的幾何特徵對於各種AD核心組件至關重要,最重要的是對於動態道路參與者的精確運動預測,以及幾何可行軌蹟的安全規劃。
C.語意地圖圖層
語意地圖圖層定義了由幾何地圖圖層提供的道路特徵的重要性。該層中的數據為地圖中表示的特徵提供了上下文和意義。例如,HD地圖中的語義地圖圖層包含諸如道路類型(例如,高速公路、住宅道路)和車道(例如,可能向左或向右改變)、它們的編號、交通方向以及車道是用於轉彎還是用於停車的資訊。它還包括有關限速、車道邊界、十字路口、人行橫道、交通標誌、紅綠燈、停車位、公車站和許多其他對構建環境上下文表示很重要的特徵的資訊。語意地圖層允許自動駕駛汽車建構其環境的詳細情境表示,並理解交通規則,從而能夠在不同的交通場景中做出正確和安全的決策。簡單地說,語意地圖圖層為幾何地圖中定義的道路特徵和物件分配語義標籤。例如,幾何圖層中的點只不過是地圖座標參考系中的一組有序座標。只有語意層定義該點是否對應紅綠燈、讓行標誌或停車標誌。眾所周知,高精地圖包含豐富的語意資訊。語義層還將元資料與道路特徵相關聯,如道路曲率、建議行車速度和每個語義特徵的唯一標識符。事實上,語義豐富的高精地圖使自動駕駛汽車能夠更好地了解駕駛情況,從而在複雜的場景中做出複雜的決策。然而,建構可靠且高保真的道路環境語義圖並不是一個簡單的過程。需要幾個處理步驟,不限於場景分割、目標偵測、分類、姿態估計和地圖。隨著電腦視覺、深度學習、感測器融合和語義SLAM演算法的最新進展,建立準確的語義圖成為可能。
D.道路連接層
道路連接層描述道路網路的拓撲結構以及各種幾何元素是如何連接的。與只包含道路級資訊和道路級連接的數位地圖的標準定義相反,高精地圖包含車道級幾何和語義訊息,因此道路之間的連接變得複雜,因為它定義了兩組或多組車道之間的連接。更準確地說,這一層提供了道路的佈局和連通性,包括車道邊界和中心線以及十字路口。車道級連通性資訊對於規劃道路和車道之間的合法過渡以及規劃每個交叉口允許的操作是必要的,這對自動駕駛汽車的路徑規劃至關重要。簡單地說,該層定義了構成幾何層的圖元如何相互連接。這些連接是透過定義幾何和語義元素的順序對來建立的。為每個幾何和語義元素分配一個唯一的標識符可以使用圖形資料結構來表示這些訊息,其中每個元素都由一條邊和它們作為節點的連接來表示。圖形結構允許快速查詢和搜尋地圖,並有效地規劃路線。
E.先驗地圖圖層
該圖層也被稱為先驗地圖圖層,因為它表示並學習過去經驗中的資訊。它涉及地圖中的幾何和語義元素,它們的狀態隨時間變化。從車隊的數據中學習交通流和事故區域的狀態允許更有效和更具預測性的駕駛行為。該層還獲取和學習有助於預測人類駕駛行為和十字路口紅綠燈動態狀態的資訊。它還適應臨時道路設置,如停車命令、佔用率和時間表。例如,一些城市的路邊停車場在某些工作日會發生變化,預測佔用的機率,並且管理給定停車場的時間規則是從經過該停車場的不同車隊車輛的先前地圖層感測器讀數中得出的。由於不同社會之間的社會文化差異,學習和預測道路駕駛員的駕駛行為可能具有挑戰性。根據經驗對這些行為進行建模對於通用且可擴展的AD系統至關重要。
F.即時地圖資料
高精地圖中的即時圖層是一個動態圖層,它提供有關環境的即時信息,例如交通狀況、道路封閉和其他可能影響自動駕駛車輛導航的事件。該層通常是透過組合來自各種來源的數據來創建的,例如安裝在車輛上或位於路邊的相機、感測器和其他連接設備。透過參與車輛的眾包或使用特定通訊網路的智慧基礎設施,即時收集資料並用於更新高精地圖。實時層可以包括諸如其他車輛的位置和速度、交通號誌的位置和狀態以及道路上是否存在施工區域或其他障礙物和堵塞物的資訊。這些資訊對於自動駕駛汽車即時做出安全高效的駕駛決策以優化交通流量和減少擁塞至關重要。此外,即時層可以用於透過提供關於環境的最新資訊來提高HD地圖的準確性和完整性,這些資訊可能不會被用於創建地圖的感測器捕獲。簡單地說,高精地圖中的即時圖層提供了環境的動態、最新表示。動態元素的高精地圖即時更新具有挑戰性,需要複雜的智慧通訊基礎設施和多個參與者之間的合作。智慧交通系統(ITS)、高精地圖提供者和車輛之間的資料傳輸必須可靠,並滿足本調查稍後介紹的某些要求。
自動駕駛系統架構中的高精地圖
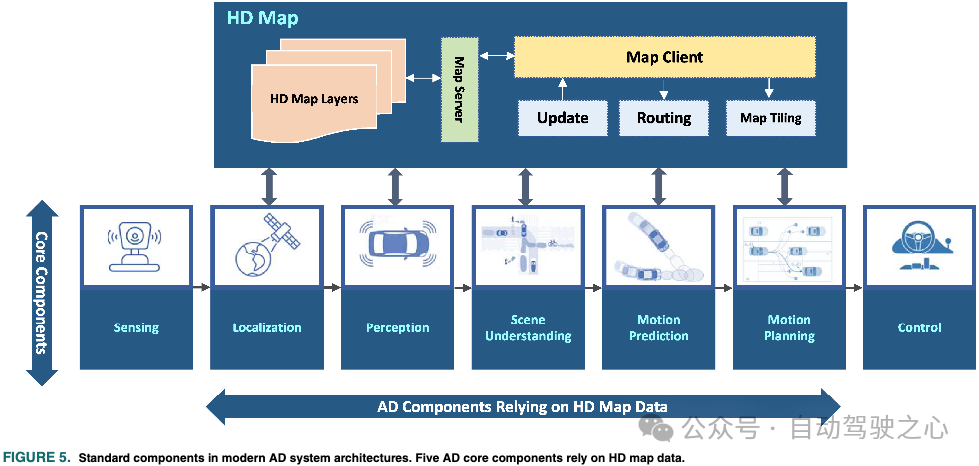
高精地圖為AD系統提供了道路環境的詳細而精確的表示。這些地圖包含自動駕駛汽車安全高效導航所需的車道級幾何、拓撲和語義資訊。在自動駕駛汽車中使用高精地圖可以讓他們更了解周圍環境,規劃路線,並做出更準確的駕駛決策,從而確保乘客和其他道路使用者的安全。本節討論高精地圖在AD系統中的重要性和用途。超精密地圖資料現在是AD系統中大多數不同核心組件的組成部分。為了討論高精地圖在AD中的重要性和用途,我們簡要介紹了典型的現代AD系統的架構和標準組件。圖5顯示了AD系統的標準元件,展示了那些依賴HD地圖的元件。本節首先簡要介紹AD系統的體系結構及其運作方式及其各種組件。本節的其餘部分對依賴高精地圖的AD組件的最新技術進行了廣泛的回顧。
A.自動駕駛系統架構
自動化車輛是一種複雜的網路物理系統,其中不同的組件必須協同工作,以穩健、可靠和安全的方式完成整體駕駛任務。雖然不存在AD系統的獨特架構,但我們在這項工作中依賴一種通用架構,有助於我們了解如何使用高精地圖來改善AD系統的不同功能。類似於任何機器人系統,自動駕駛汽車都可以被視為具有三個主要元件的認知代理,(1)感測器、(2)感知和(3)行為。將這些元素拆分為一個產業級的AD系統會產生幾個元件,如圖5所示。現代AD系統架構中的感測組件通常包括不同的感測器,如IMU、GPS、相機、雷射雷達和雷達。這些感測器的子集允許車輛知道其相對於環境的位置,即用於定位,並且剩餘的感測器用於感知環境本身。感測組件的作用是讀取和預處理原始感測器數據,並將其提供給AD系統的其他部分。在最簡單的形式中,感測組件由一組感測器驅動器組成,用於即時讀取原始感測器資料。定位組件是整個AD系統可靠運作的最關鍵部件之一。它的作用是精確估計車輛的位置。定位的錯誤會傳播到AD處理管道的其餘部分。定位只是一個狀態估計器,它融合了來自感測組件的原始感測器數據。此外,地圖的可用性允許改進和穩健定位,特別是在一些感測器失效或性能下降的區域。感知的作用是產生當前環境狀態的中間層級表示,包括有關障礙物和道路因素的資訊。此表示還包括有關車道(位置、邊界、標記和類型)、交通標誌、紅綠燈和可駕駛區域的詳細資訊。電腦視覺和深度學習技術廣泛用於分割、聚類和分類任務。此外,目標級融合也是此組件的重要組成部分。感知的輸出是被追蹤目標的清單以及用於場景理解的圖像的語義分割。來自HD地圖的幾何和語義資訊也可以用於改進目標檢測和融合。準確的感知對安全至關重要,因為感知錯誤會影響整個AD系統所使用資訊的品質。因此,使用冗餘的感測器資料來源可以增強感知準確性的信心,從而提高整個系統的穩健性。場景理解組件是AD系統中感知組件和高階認知組件所給予的環境抽像中級狀態表示之間的橋樑。該組件旨在透過建立高精地圖和感知組件提供的數據,提供對駕駛場景的更高層次的上下文理解。在本節的後面,我們將討論如何將這兩個資訊來源融合,以建立用於理解駕駛環境的場景表示。 AD管線中依賴HD地圖的另一個元件是運動預測元件。它建立在場景理解提供的環境的高級時空表示的基礎上,以預測車輛周圍道路代理的行為。 HD地圖在運動預測中的作用是提供場景中每個道路代理的先前軌跡。運動預測是一個高度多模態的問題,HD地圖在其中發揮關鍵作用,本節將對此進行詳細討論。運動規劃組件旨在計算自動駕駛汽車可行、無碰撞和安全的軌跡。這是透過優化在HD地圖資料上運行的路由演算法獲得的全局最短路徑以及道路代理的預測軌跡來實現的。運動規劃還包括行為規劃功能,該功能依賴於由檢測到的物件和HD地圖定義的當前場景的狀態。控制部件接收計畫軌跡,並計算轉向、煞車和加速驅動系統的控制命令。控制組件沒有明確依賴地圖數據,因此在本次調查中不會考慮它。最後,如圖5所示,透過處理提供地圖資料的請求,使用一個特殊元件為所有其他元件提供服務。高精地圖資料通常儲存在地圖伺服器(本地或雲端)查詢的資料庫中,以路由、平鋪和更新車輛中地圖客戶端的請求。由於路由元素需要特殊的演算法處理,我們將在AD系統中HD地圖應用的調查中考慮它。
B.定位
AD系統中的定位元件旨在估計車輛相對於全域參考座標系的位置和方向。其關鍵作用是持續保持系統中連續組件所需估計的高精度和穩健性。定位演算法的精確度決定了整個AD系統的可靠性。惡劣天氣條件下定位的穩健性是現代AD系統的關鍵要求,因為退化的估計性能可能會導致嚴重後果和潛在損害。在過去的二十年裡,對定位的重大研究取得了顯著的成績,同時也產生了各種各樣的方法。為了確保正常運作條件並實現全球系統安全,自動駕駛汽車需要定位在10公分精度以內。
C.感知
AD系統中的感知組件通常與處理原始相機影像和雷射雷達點雲相關聯,不僅用於檢測和追蹤靜態目標(例如,交通標誌和道路標記),也用於偵測和追蹤動態障礙物,例如,周圍的車輛、行人和騎自行車的人。感知是AD系統的關鍵核心功能之一。確保其可靠性和即時性能對於確保無碰撞導航至關重要。將感知數據與高精地圖各層中包含的詳細而精確的幾何和語義資訊相融合,可以透過關注最相關的興趣區域(ROI)來潛在地改善感知。更準確地說,HD地圖的幾何形狀允許定義ROI來過濾點雲,只留下感知函數特別感興趣的點雲,從而簡化和提高不急檢測的計算效率。
D.場景理解
了解駕駛環境對於自動駕駛汽車做出正確、安全的決策至關重要。高精地圖的早期動機之一是為自動駕駛汽車提供精確而詳細的信息,以幫助了解其環境。這些資訊使AD系統能夠理解當前的駕駛狀況並解釋構成場景的所有實體。地圖中包含的幾何結構和語義使系統地建立緊湊的資料模型和環境表示成為可能,使車輛能夠處理複雜的駕駛場景。更準確地說,AD系統中的場景理解組件,在HD地圖的幾何和語義資訊的支持下,可以始終如一地提供有意義的感知上下文。除了原始目標檢測,場景理解旨在提取和估計安全關鍵訊息,並使其可用於後續處理階段。
E.ROUTING
道路等級數位地圖有助於人類駕駛員導航。這些地圖中的路線計算不能超出使用道路等級連接的範圍,因為這些地圖不包括車道層級的詳細資訊。準確和優化的駕駛路線對於節省時間和能源以及促進全球車輛安全是必要的。高效率且低成本的行駛路線計算必須考慮環境的車道級模型。此外,在高度動態的環境中,當自動駕駛汽車在環境中導航時,有關交通狀態和車道佔用的詳細資訊對於動態調整路線至關重要。考慮到高精地圖靜態層的詳細和準確的車道層級資訊以及先驗和即時層,有效的動態路線計算是可能的。為了使自動駕駛汽車中的路由子系統能夠計算從目前位置到設定目的地的可行駛路徑,必須從HD地圖伺服器為系統提供最新的地圖,如圖5所示。或者,與數位地圖一樣,路線計算也可以作為一項服務提供。在將其準確位置發送到HD地圖伺服器後,可以計算最佳路線並將其反饋給車輛,以支援系統的其他核心組件。在過去的幾年裡,這些路由服務涉及到考慮即時交通狀況和能量因素(例如,最節能的路由)。對於自動駕駛汽車,可以考慮其他因素,例如避開ADS難以導航的複雜城市環境的路線,或具有良好網路覆蓋率的路線,以確保線上服務的連續連接,包括即時高精地圖服務。
F.運動規劃
運動規劃在AD系統中的作用是產生可行、安全、無碰撞和節能的軌跡。運動規劃任務通常包括軌跡產生和行為規劃。行為規劃是一種高階決策功能,用於決定不同駕駛狀態之間的轉換,例如變換車道、車道內車輛跟馳、減速停車等。為了安全地進行這些轉換,行為規劃器需要局部地圖和車輛感知來建立車輛環境的轉換模型。與移動機器人中的導航不同,道路環境是高度結構化的,所有道路使用者都必須遵守交通規則。產生的AD軌跡是嚴格要求的,以確保遵守交通規則,並且運動在可行駛的道路區域內。自動駕駛汽車的運動規劃有不同的方法,它們都在某種程度上依賴高精地圖提供的幾何和語義資訊來遵守交通規則。在基於樣本的運動規劃方法中,HD地圖的車道幾何形狀用於透過拒絕不可行的候選軌跡來限制搜尋空間。
G.運動預測
駕駛環境是高度動態的,涉及不同的道路參與者,如行人、車輛和騎自行車的人。預測這些道路參與者未來的運動和行為對於自動駕駛汽車建構其互動環境的上下文感知表示至關重要,從而預測潛在的危險情況。從抽象的角度來看,這些交通參與者可以被認為是一個複雜的多智能體系統。事實上,開發可靠的道路代理運動和行為預測解決方案將提高自動駕駛汽車的安全性和能力,以適應現實世界交通條件下的類人行為。預測這些交通參與者的行為對AD系統至關重要,主要用於風險評估和安全舒適的運動規劃。運動預測是指根據道路代理的當前狀態和他們所處環境的模型來估計他們的未來行為。各種研究工作已經解決了預測道路參與者未來運動的問題。
H.第三方應用
高精地圖可以提供準確可靠的GT數據,可作為校準感測器輸出的參考。例如,雷射雷達可以使用高精地圖幾何元素的高精度座標進行校準,並與IMU完美配準。透過將感測器測量值與HD地圖資料進行比較,可以識別和糾正任何錯誤或差異,從而改善感測器的校準。此外,高精地圖可用於線上(自行)校準。高精地圖、即時原始感測器數據和執行比較的演算法的可用性使計算感測器測量值和GT間的誤差成為可能。因此,它允許即時地連續校正感測器的校準誤差。這使得AD系統能夠對不斷變化的環境條件以及感測器性能變化更加穩健和可靠。與離線校準方法相比,線上校準可以實現更準確、更穩健的感測器校準。最近,高精地圖還可以用於增強道路註釋,以建立用於交通地標偵測的大型資料集。
建立高精地圖
A. 行動建圖系統
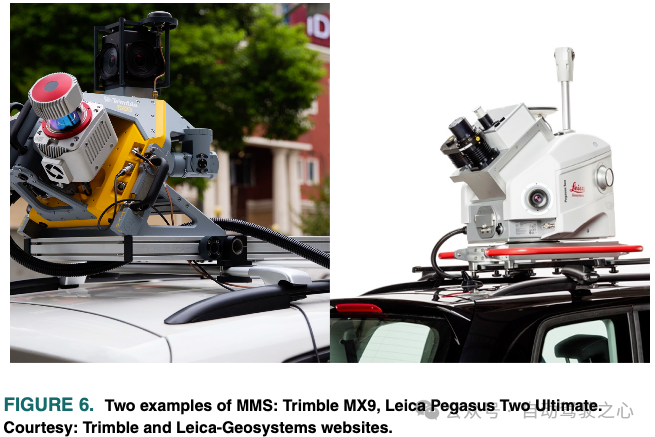
建立高精地圖是一個複雜的過程,需要幾個步驟。建立高精地圖程序的第一步是派遣配備一套高精度和校準良好的感測器的專業車輛來調查和收集有關環境的數據。用於建圖的資料擷取車輛可能配備有與RTK(即時運動學)定位精度高達幾公分的校正服務連接或實現校正服務的高精度GNSS。 GNSS定位測量通常與高性能IMU(慣性測量單元)和車輪里程計的測量相融合。有幾種商業產品將全球導航衛星系統和IMU作為慣性導航系統整合在一個單元中。建圖車輛還配備了一個或多個高解析度雷射雷達和攝影機,以收集道路環境的原始3D/2D資料。有兩種方法可以設定用於繪製地圖的資料收集工具。首先是購買上述感測器,選擇合適的配置並將其安裝在車輛上。儘管這種方法提供了預先定義感測器配置的靈活性;然而,將幾個不同的感測器校準到繪圖所需的精度並不是微不足道和耗時的,尤其是對於相機。或者,一些製造商在一個封裝中提供整套感測器,稱為移動建圖系統(MMS)。商用MMS的示例如圖6所示。
高精地圖維護
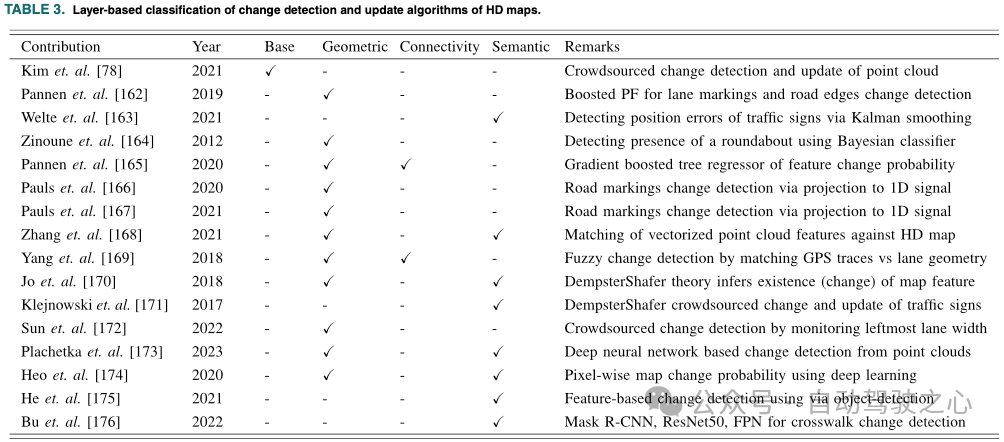
有最新的高清地圖對於各種AD核心元件的正確運作至關重要。高清地圖中的錯誤可能會由於系統做出的不當決定而導致嚴重損壞。透過地圖車輛的頻繁更新,可以避免錯誤的決策。由於新的基礎設施建設、道路維護和車道擴建,道路環境高度動態,可能會發生頻繁變化。繪製地圖的車輛必須能夠偵測到環境的變化,並發送它們來更新地圖。地圖更新過程涉及複雜的處理步驟,包括處理來自不同規模的多個來源和感測器的數據,識別儲存的地圖和新收集的環境數據之間的偏差,並最終整合這些偏差來更新地圖的不同層。文獻中已經開發了幾種方法和方法來捕捉高清地圖的變化並進行更新。在下文中,我們回顧了檢測高清地圖變化的不同方法和方法,以及如何將這些資訊應用於更新地圖。我們調查先前維護高清地圖的工作所遵循的方法是基於分析每種最先進的方法維護的圖層,如表3所示。
A.地圖變換偵測
#高清地圖中的變化偵測是指辨識環境變化的過程,如新建築、道路封閉等。隨後相應地更新地圖的圖層。高清地圖會定期變化,擁有一張可以被自動駕駛汽車信任的地圖對於確保導航安全至關重要。變化檢測通常透過使用各種感測器來實現,如相機、光達和雷達,並結合電腦視覺演算法和機器學習技術。甚至在高清地圖出現之前,變化偵測演算法就已經在許多應用中找到了用武之地。遙感是地圖變化檢測和更新的早期應用之一。它也成功應用於城市監測、森林變化、危機監測、三維地理資訊更新、施工進度監測和資源調查。在這些應用程式的最基本層面上,問題相當於比較原始感測器數據,主要是3D點雲、2D影像或兩者結合。
B.地圖資料更新
HD地圖維護的第二階段是基於變更偵測的結果來更新地圖元素。簡單地說,地圖更新相當於一個機率資料融合問題。近乎即時地持續監測不斷變化的環境中的變化,並融合時間和空間上的不同資料模式,以及從不同來源更新多個層,這確實是一項具有挑戰性的任務。 Cadena等人在他們的調查論文中指出,更新和維護大型自動駕駛汽車車隊創建和使用的高清地圖的分散式過程是未來研究的一個令人信服的主題。朝著這個方向,Kim等人提出了一種從眾包點雲資料中保持新特徵圖層的最新解決方案。這種新的特徵圖形成了建構HD地圖的不同語意和幾何特徵的基礎。
高清地圖的資料和通訊基礎設施
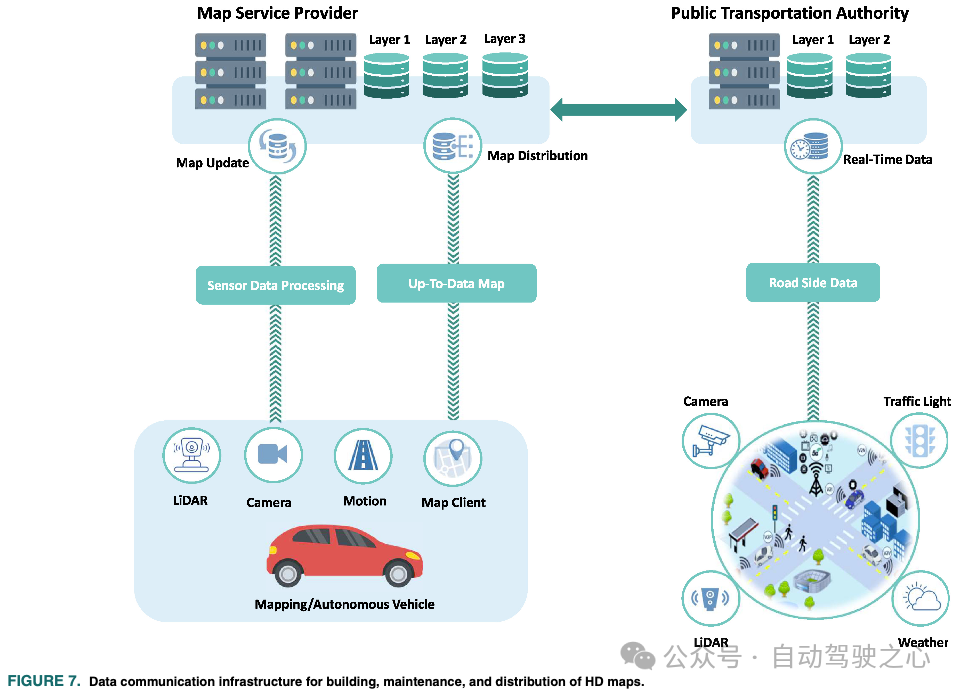
大規模建構和維護高清地圖是多個利害關係人之間的資料交換問題,例如,作為ITS路邊基礎設施所有者的政府、地圖提供者和車輛,如圖7所示。地圖資料的收集、建置、維護和分發需要可靠的通訊和分散式運算基礎設施。本節討論了擴展高清地圖的創建、維護和分發所需的數據和通訊基礎設施。
挑戰與未來展望
儘管CCAM在過去十年中取得了顯著進步,但實現車輛的完全自主仍然是一個尚未解決的挑戰。對於要大規模部署的自動駕駛汽車來說,高清地圖的可擴展解決方案至關重要。在本節中,我們闡明了需要解決的各種挑戰,以充分發揮高清地圖CCAM的潛力。毫無疑問,在利害關係人之間建構、維護和分發地圖資料的成本效益和靈活性解決方案的可用性將大大提高CCAM在未來幾代智慧城市中的可擴展性。此外,我們也討論了高清地圖的未來前景和應用。
A.挑戰
- 標準化與資料表示:高清地圖的概念已被廣泛接受,成為CCAM的關鍵技術。然而,對於如何表示地圖數據、需要多少層、每個層中必須儲存什麼地圖數據以及以何種數據格式儲存地圖數據,並沒有達成一致意見。由於高清地圖的複雜性及其包含的大量數據和信息,很難為其定義一個通用標準,因此創建一個全面且易於理解、存儲、維護、更新和有效分發的標準具有挑戰性。為地圖數據定義一個通用標準將提供更多的數據相容性,方便存取數據,同時降低開發和整合成本。此外,這將提高資料的品質、一致性和隱私性,從而提高包括自動化車輛在內的所有參與者的道路安全。
- 可擴展性:可擴展的高清地圖解決方案對自動駕駛汽車的大規模部署至關重要。建造城市、地區和全國範圍的高清地圖並保持其更新仍然是一個巨大的挑戰,尤其是在處理用於表示幾何道路特徵和交通標誌的不同標準、交通規則和條例時。這些標準因地區而異。映射演算法必須是通用的,並且能夠在不同的地區和國家工作。映射應該是一個連續的資料收集和處理過程,以修復已更改的區域。這個過程在大的地理區域變得具有挑戰性,在這些區域,大量的車輛必須成為地圖繪製過程的一部分。繪製地圖的成本直接取決於要繪製地圖的區域有多大以及為其服務所需的車輛數量。正如本文早期所討論的,繪製地圖的車輛非常昂貴。此外,使用配備消費級感測器的單獨車輛需要複雜的演算法,這些演算法尚未成熟。
- 網路和運算基礎設施:在建置和更新可擴展高清地圖的情況下,處理和處理大量資料需要可靠的網路和運算基礎設施,該基礎設施應協調且接近即時。隨著5G/6G蜂窩通訊、物聯網(IoT)和邊緣運算架構的出現,車載通訊的許多機會普遍可用,處理建構高清地圖的解決方案成為商業上可行的選擇。這些通訊和運算基礎設施旨在處理此類資料密集型應用程序,並滿足其延遲和頻寬要求。具有大量連網車輛的大規模眾包地圖將是這些基礎設施的主要應用之一。
- 建圖演算法的限制:儘管在構建高清地圖的自動化過程中付出了巨大的研發努力,但高清地圖的最新研究結果清楚地表明,用於提取高清地圖特徵和構建道路和車道拓樸的地圖演算法仍然局限於簡單的特徵。目前最先進的演算法可以偵測簡單的幾何特徵,但無法處理高曲率特徵,例如環形交叉路口。此外,這些方法中的大多數都需要幾個後處理步驟才能以合適的向量格式獲得特徵。地圖語意特徵仍然局限於極少數且易於偵測的交通標誌。最近很少有工作開始解決建造車道拓撲以建立簡化的道路/車道連接網路的問題。開發一個通用的地圖管道可以建立一個包含幾何、語義和拓撲資訊的全功能高清地圖。建造這樣一條管道仍然是一個挑戰。
- 地圖資料所有權、隱私、完整性和分發:建立和維護高清地圖的未來將是自動化和分發數百萬輛汽車所涉及的過程。從環境中收集、處理和儲存大量分散式資料引起了對資料所有權、隱私、完整性和分發的一些擔憂。原始地圖資料是在車輛中產生的,與來自公共當局的其他資料來源聚合,由地圖提供者處理和分發。從收集到分發的地圖資料所有權可能需要在大規模高清地圖中解決。此外,保護個人和車輛的隱私至關重要,在繪圖過程中必須加以考慮。地圖資料可以包括敏感的使用者訊息,例如車輛的精確位置以及車輛環境的精確描述。必須確保高清地圖資料的完整性,以避免錯誤和致命的決策,尤其是在自動駕駛汽車使用時。建立準確可靠的高清地圖仍然是一個正在進行的研究問題。商用高清地圖通常要經過人工檢查和驗證。從多個資料來源產生準確可靠的高清地圖數據,例如透過眾包生成,帶來了一些有待解決的技術問題。可擴展高清地圖的所有權、隱私和完整性最近開始引起研究人員的注意。另一方面,區塊鏈由於其分散式和安全性,已被證明是一種很有前途的解決方案,可確保資料完整性。建立和更新可擴展高清地圖,同時保持資料的可追溯性、隱私性和完整性的用例是區塊鏈的完美應用。這項技術有望在建立和分發下一代高清地圖方面發揮核心作用。
B.未來方向
- 精準:精確定位一直是將高清地圖引入自動駕駛汽車的主要動機之一。道路环境的密集、紧凑表示的存在是高清地图的基础;尤其是在本地化方面。HD地图中包含的信息密度和处理这些信息所需的计算工作量之间一直存在折衷。神经3D场景表示的最新进展使以非常紧凑的表示方式重建真实感3D场景成为可能。使用神经辐射场(NeFR)表示基础地图层允许受益于该层的紧凑和真实感表示。这项技术可能会让自动驾驶汽车进入一个新时代。
- 自动驾驶以外的应用:高清地图的开发主要是为了帮助自动驾驶汽车了解环境并在环境中安全导航。由于高清地图提供了详细而精确的环境表示,因此也可以用于提高经典数字地图提供的各种服务的质量。此外,高清地图在残疾人数字辅助技术中发挥着重要作用。如果视障人士配备了合适的传感器,并能够获得高度精确、详细和语义丰富的环境表示,他们的行动能力和安全性可以显著提高。如果精确定位,数字辅助设备将能够解释和理解环境,从而生成语音导航消息以实现安全导航。行人高清地图中交通信号灯和其他交通信息的实时状态与增强这些设备的功能有关。目前,大多数高清地图提供商只提供代表车辆环境的地图。今天的高清地图中仍然没有绘制车辆以外参与者的路线图,例如行人人行道和自行车道。为所有参与者构建和更新高清地图将为实现广泛的自主和非自主导航以及一些有用的数字服务铺平道路。
- 面向数字孪生:环境数字孪生是环境的整体数字表示,包括其所有物理和功能特征。城市规模的数字孪生是CCAM中的一个新兴概念,旨在构建一个数据驱动的模型,该模型将来自物联网传感器、联网车辆、建筑、智能基础设施和交通网络以及所有其他数据源的各种来源的数据相结合,以帮助创建一个全面、实时的城市模型,从而改善道路服务。这一概念将高清地图作为联网和自动驾驶汽车的数字模型概括为帮助社会中所有实体的整体数字模型。数字孪生甚至可以用于对环境中不同实体的行为进行建模,即使是在微观细节层面上。高清地图将是数字孪生的单个模块,支持我们智能城市中联网和自动驾驶汽车的不同功能和服务。由于高清地图可用于模拟复杂的驾驶场景,数字孪生将用于模拟和分析这些车辆的复杂城市规模场景。数字孪生将允许研究、分析和模拟新开发项目的影响或交通模式变化的影响,并可以帮助城市规划者和决策者通过预测未来情景来分析和优化城市的表现,并确定改进的机会。建立一个城市规模的数字孪生确实是一个巨大的挑战,需要大量的数据,而且这可能是一个复杂而耗时的过程。分布式大量数据的交叉验证、完整性和可信度仍然是创建数字双胞胎的挑战。车辆的众包道路地图绘制将被同时使用异构连接传感器的大量数据进行室外和室内地图绘制的统一过程所取代。
结论
高清地图仍然是现实世界CCAM应用程序的一个快速发展的方面,推动了该领域的创新和进步。尽管在高清地图在AD系统中的应用以及构建和维护高清地图的算法和基础设施方面进行了大量的研究和开发工作,但很少有文献可以总结和提供这些工作的立足点。本文广泛回顾了以往关于构建和维护高清地图的工作,包括成本效益高的解决方案,以及从生成到分发的通信和地图数据要求。此外,本文还讨论了当前在构建和维护高清地图方面面临的挑战。更准确地说,我们提供了高清地图的独立概述,作为更广泛的智能交通系统社区的背景。我们还讨论和分析了将高清地图用于AD系统中各种核心功能的最新技术。此外,我们广泛讨论和回顾了构建不同层次的高清地图并使其保持最新的不同方法、方法和算法。最后,我们对下一代移动应用的高清地图的未来发展进行了一些说明。
以上是雲端車端MapNeXt全搞定!面向下一代線上高精地圖構建的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)
熱門話題



 數字貨幣如何滾倉?數字貨幣滾倉平台有哪些?
Mar 31, 2025 pm 07:36 PM
數字貨幣如何滾倉?數字貨幣滾倉平台有哪些?
Mar 31, 2025 pm 07:36 PM
數字貨幣滾倉,即利用借貸放大交易槓桿以提高收益的投資策略。 本文詳解數字貨幣滾倉流程,包括選擇支持滾倉的交易平台(如Binance、OKEx、gate.io、Huobi、Bybit等),開通槓桿賬戶,設置槓桿倍數,借入資金進行交易,以及實時監控市場並調整倉位或追加保證金以避免爆倉等關鍵步驟。 然而,滾倉交易風險極高,投資者需謹慎操作並製定完善的風險管理策略。 了解更多數字貨幣滾倉技巧,請繼續閱讀。
 gate.io交易平台交易手續費怎麼計算?
Mar 31, 2025 pm 09:15 PM
gate.io交易平台交易手續費怎麼計算?
Mar 31, 2025 pm 09:15 PM
Gate.io交易平台手續費因交易類型、交易對、用戶VIP等級等因素而異。現貨交易默認費率為0.15%(VIP0等級,Maker和Taker),但會根據用戶30天交易量和GT持倉量調整VIP等級,等級越高費率越低,並支持GT平台幣抵扣,最低可享55折優惠。合約交易默認費率為Maker 0.02%,Taker 0.05%(VIP0等級),同樣受VIP等級影響,且不同合約類型和槓桿
 幣安binance電腦版入口幣安binance電腦版pc官網登錄入口
Mar 31, 2025 pm 04:36 PM
幣安binance電腦版入口幣安binance電腦版pc官網登錄入口
Mar 31, 2025 pm 04:36 PM
本文提供Binance幣安電腦版登錄與註冊的完整指南。首先,詳細講解了幣安電腦版登錄步驟:在瀏覽器搜索“幣安官網”,點擊登錄按鈕,輸入郵箱和密碼(啟用2FA需輸入驗證碼)即可登錄。其次,文章闡述了註冊流程:點擊“註冊”按鈕,填寫郵箱地址,設置強密碼,驗證郵箱即可完成註冊。最後,文章還特別強調了賬戶安全,提醒用戶注意官方域名、網絡環境以及定期更新密碼,確保賬戶安全,更好地使用幣安電腦版提供的各項功能,例如查看行情、進行交易和管理資產。
 歐易okex賬號怎麼註冊、使用、註銷教程
Mar 31, 2025 pm 04:21 PM
歐易okex賬號怎麼註冊、使用、註銷教程
Mar 31, 2025 pm 04:21 PM
本文詳細介紹了歐易OKEx賬號的註冊、使用和註銷流程。註冊需下載APP,輸入手機號或郵箱註冊,完成實名認證。使用方面涵蓋登錄、充值提現、交易以及安全設置等操作步驟。而註銷賬號則需要聯繫歐易OKEx客服,提供必要信息並等待處理,最終獲得賬號註銷確認。 通過本文,用戶可以輕鬆掌握歐易OKEx賬號的完整生命週期管理,安全便捷地進行數字資產交易。
 虛擬幣app軟件推薦網站有哪些?
Mar 31, 2025 pm 09:06 PM
虛擬幣app軟件推薦網站有哪些?
Mar 31, 2025 pm 09:06 PM
本文推薦十個知名的虛擬幣相關APP推薦網站,涵蓋幣安學院(Binance Academy)、OKX Learn、CoinGecko、CryptoSlate、CoinDesk、Investopedia、CoinMarketCap、火幣大學(Huobi University)、Coinbase Learn和CryptoCompare。這些網站不僅提供虛擬貨幣市場數據、價格走勢分析等信息,還提供豐富的學習資源,包括區塊鏈基礎知識、交易策略、以及各個交易平台APP的使用教程和評測,幫助用戶更好地了解和使
 貨幣交易網官方網站大全2025
Mar 31, 2025 pm 03:57 PM
貨幣交易網官方網站大全2025
Mar 31, 2025 pm 03:57 PM
全球用户量排名前列,支持现货、合约、Web3钱包等全品类交易,安全性高且手续费低。历史悠久的综合交易平台,以合规性和高流动性著称,支持多语言服务。行业龙头,覆盖币币交易、杠杆、期权等,流动性强且支持BNB抵扣费用。
 web3在哪個平台交易?
Mar 31, 2025 pm 07:54 PM
web3在哪個平台交易?
Mar 31, 2025 pm 07:54 PM
本文盤點十大知名Web3交易平台,包括幣安(Binance)、歐易(OKX)、Gate.io(芝麻開門)、Kraken、Bybit、Coinbase、KuCoin、Bitget、Gemini和Bitstamp。 文章詳細對比了各平台的特色,例如幣種數量、交易類型(現貨、期貨、期權、NFT等)、手續費、安全性、合規性、用戶群體等,旨在幫助投資者選擇最合適的交易平台。無論是高頻交易者、合約交易愛好者,還是注重合規性和安全性的投資者,都能從中找到參考信息。
 芝麻交易所gate網頁版進入 芝麻gate交易所官方網頁版點擊進入
Mar 31, 2025 pm 06:18 PM
芝麻交易所gate網頁版進入 芝麻gate交易所官方網頁版點擊進入
Mar 31, 2025 pm 06:18 PM
芝麻交易所Gate.io網頁版登錄便捷,只需在瀏覽器地址欄輸入“gate.io”並回車即可訪問官方網站。簡潔的主頁提供清晰的“登錄”和“註冊”選項,用戶可根據自身情況選擇登錄已註冊賬戶或註冊新賬戶。註冊或登錄後,即可進入交易主界面,進行加密貨幣交易、查看行情及賬戶管理等操作。 Gate.io網頁版界面友好,操作簡便,適合新手和專業交易者使用。
