

圖領域首個通用框架來了!入選ICLR\'24 Spotlight,任意資料集、分類問題都可搞定

能不能有一種通用的圖模型——
它既能夠根據分子結構預測毒性,又能夠給出社交網路的朋友推薦?
或既能預測不同作者的論文引用,還可以發現基因網路中的人類老化機制?
你還真別說,被ICLR 2024接收為Spotlight的「One for All(OFA)」框架就實現了這個「精髓」。
這項研究是由聖路易斯華盛頓大學陳一昕教授團隊、北京大學張牧涵以及京東研究院陶大程等研究者共同提出的。
作為圖領域首個通用框架,OFA實現了訓練單一GNN模型即可解決圖領域內任意資料集、任意任務類型、任意場景的分類任務。
具體如何實現,以下為作者投稿。
圖領域通用模型設計面臨三大難
設計一個通用的基礎模型來解決多種任務是人工智慧領域的一個長期目標。近年來,基礎大語言模型(LLMs)在處理自然語言任務方面表現出色。
然而,在圖領域,雖然圖神經網路(GNNs)在不同的圖資料中都有著不俗的表現,但如何設計與訓練一個能同時處理多種圖任務的基礎圖模型依然前路茫茫。
與自然語言領域相比,圖領域的通用模型設計面臨許多獨特的困難。
首先,區別於自然語言,不同的圖資料有著截然不同的屬性與分佈。
例如分子圖描述了多個原子如何透過不同的作用力關係形成不同的化學物質。而引用關係圖則描述了文章與文章之間相互引用的關係網。
這些不同的圖資料很難被統一在一個訓練框架下。
其次,不同於LLMs中所有任務都可以被轉換成統一的下文生成任務,圖任務包含了多種子任務,例如節點任務,鏈路任務,全圖任務等。
不同的子任務通常需要不同的任務表示形式與不同的圖模型。
最後,大語言模型的成功離不開透過提示範式而實現的上下文學習(in-context learning)。
在大語言模型中,提示範式通常為下游任務的可讀文字描述。
但是對於非結構化且難以用語言描述的圖數據,如何設計有效的圖提示範式來實現in-context learning依然是個未解之謎。
用「文字圖」概念等來解決
下圖給出了OFA的整體框架:
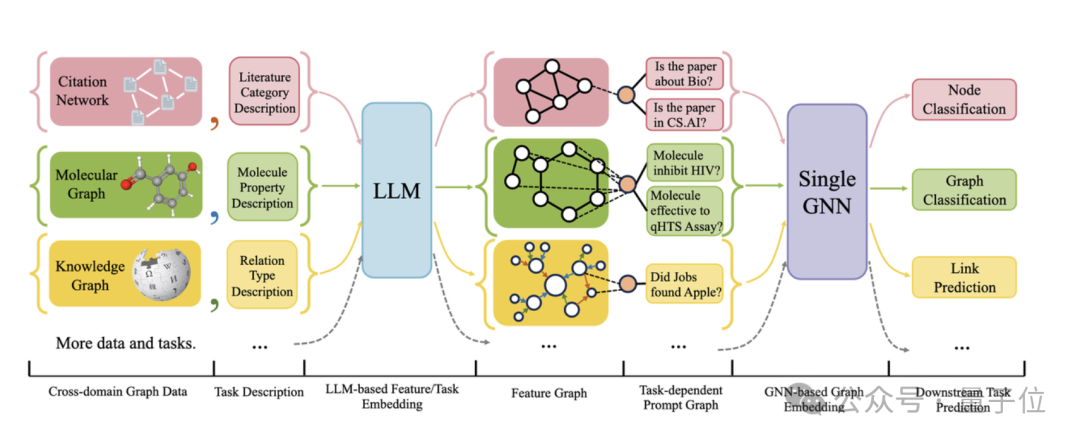
具體而言, OFA的團隊透過巧妙的設計來解決上述所提及的三個主要問題。
對於不同圖形資料屬性與分佈不同的問題,OFA透過提出文字圖(Text-Attributed Graph, TAGs) 的概念來統一所有圖資料。利用文字圖,OFA將所有的圖資料中的節點資訊與邊資訊用統一的自然語言框架來描述,具體如下圖所示:


接著,OFA透過單一LLM模型對所有資料中的文字進行表示學習得到其嵌入向量。
這些嵌入向量將作為圖模型的輸入特徵。這樣,來自不同領域的圖資料將被映射到相同的特徵空間,使得訓練一個統一的GNN模型可行。
OFA收集了9個來自不同領域,不同規模的圖資料集,包括引用關係圖,Web連結圖,知識圖譜,分子圖, 如下圖所示:

此外,OFA提出Nodes-of-Interest(NOI)子圖與NOI提示節點 (NOI Prompt Node)來統一圖領域內不同的子任務類型。這裡NOI代表參與到對應任務的一組目標節點。
例如,在節點預測任務中,NOI是指需要預測的單一節點;而在連結任務中,NOI包含兩個需要預測連結的節點。 NOI子圖是指圍繞這些NOI節點擴展出的一個包含h-hop鄰域的子圖。
然後,NOI提示節點為一個新引入的節點類型,直接連接到所有的NOI。
重要的是,每個NOI提示節點包含了當前任務的描述訊息,這些訊息以自然語言的形式存在,並和文字圖被同一個LLM所表示。
由於NOI中節點所包含的資訊在經過GNNs的消息傳遞後將被NOI提示節點所收集,GNN模型只需透過NOI提示節點來進行預測。
這樣,所有不同的任務類型將擁有統一的任務表示。具體實例如下圖所示:
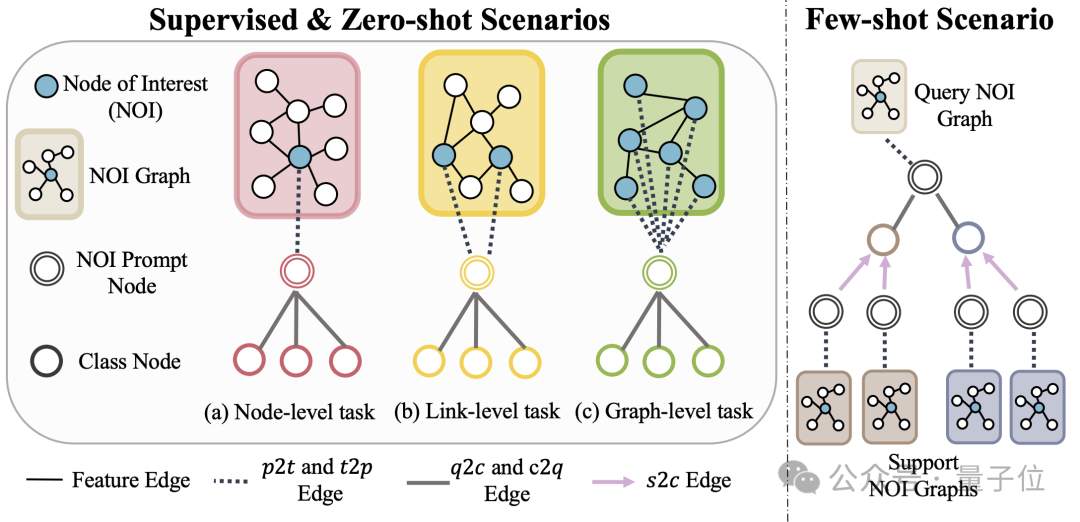
最後,為了實現圖領域的in-context learning,OFA引入統一的提示子圖。
在一個有監督的k-way分類任務場景下,這個提示子圖包含了兩類節點:一類是上文提到的NOI提示節點,另一類是代表k個不同類別的類別節點 (Class Node)。
每個類別節點的文字將描述此類別的相關資訊。
NOI提示節點將會單向連線到所有類別節點。透過這個方式建構好的圖將被輸入進圖神經網路模型進行訊息傳遞與學習。
最終,OFA將對每個類別節點分別進行二分類任務,並取機率最高的類別節點作為最終的預測結果。
由於類別資訊存在於提示子圖中,即使遇到全新的分類問題,OFA透過建立對應的提示子圖即可直接進行預測而無需任何微調,從而實現了零樣本學習。
對於少樣本學習場景,一個分類任務將包含一個query輸入圖和多個support輸入圖,OFA的提示圖範式會將每個support輸入圖的NOI提示節點與其對應的類別節點相連,同時將query輸入圖的NOI提示節點與所有類別節點連結。
後續的預測步驟與上文所述一致。這樣每個類別節點將會額外得到support輸入圖的信息,從而在統一的範式下實現少樣本學習。
OFA的主要貢獻總結如下:
統一的圖資料分佈:透過提出文字圖並以LLM轉換文字訊息,OFA實現了圖資料的分佈對齊與統一。
統一的圖任務形式:透過NOI子圖與NOI提示節點,OFA實現了多種圖領域子任務的統一表示。
統一的圖提示範式:透過提出新穎的圖提示範式,OFA實現了圖領域內的多場景in-context learning。
超強泛化能力
文章在所收集的9個資料集上對OFA框架進行了測試,這些測試涵蓋了在有監督學習場景下的十種不同任務,包括節點預測、鏈路預測和圖分類。
實驗的目的是驗證單一的OFA模型處理多任務的能力,其中作者對比使用不同LLM(OFA-{LLM})和每個任務訓練單獨模型 (OFA-ind-{LLM})的效果。
比較結果如下表所示:
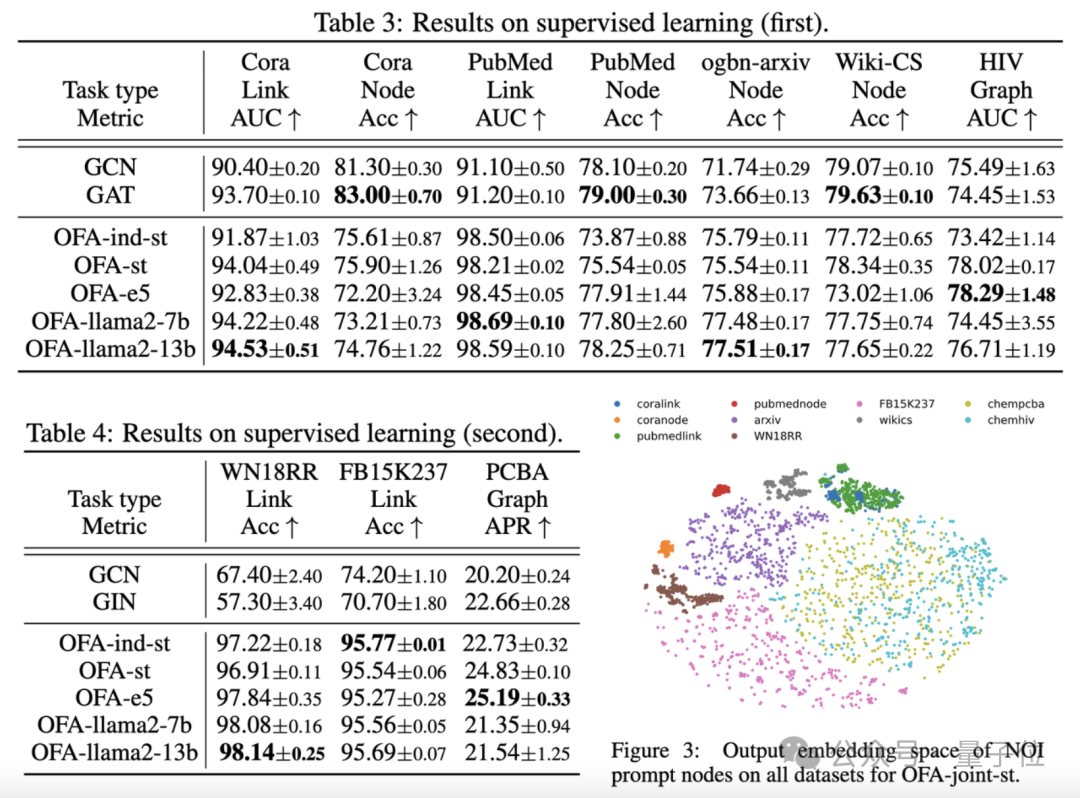
可以看到,基於OFA強大的泛化能力,一個單獨的圖模型(OFA -st,OFA-e5,OFA-llama2-7b,OFA-llama2-13b)即能夠在所有的任務上都具有與傳統的單獨訓練模型(GCN, GAT, OFA-ind-st )相近或更好的表現。
同時,使用更強大的LLM可以帶來一定的效能提升。文章進一步繪製了訓練完成的OFA模型對於不同任務的NOI提示節點的表示。
可以看到不同的任務被模型嵌入到不同的子空間,這使得OFA可以對於不同的任務進行分別的學習而不會相互影響。
在少樣本以及零樣本的場景下,OFA在ogbn-arxiv(引用關係圖),FB15K237(知識圖譜)以及Chemble(分子圖)上使用單一模型進行預訓練,並測試其在不同下游任務及資料集上的表現。結果如下:
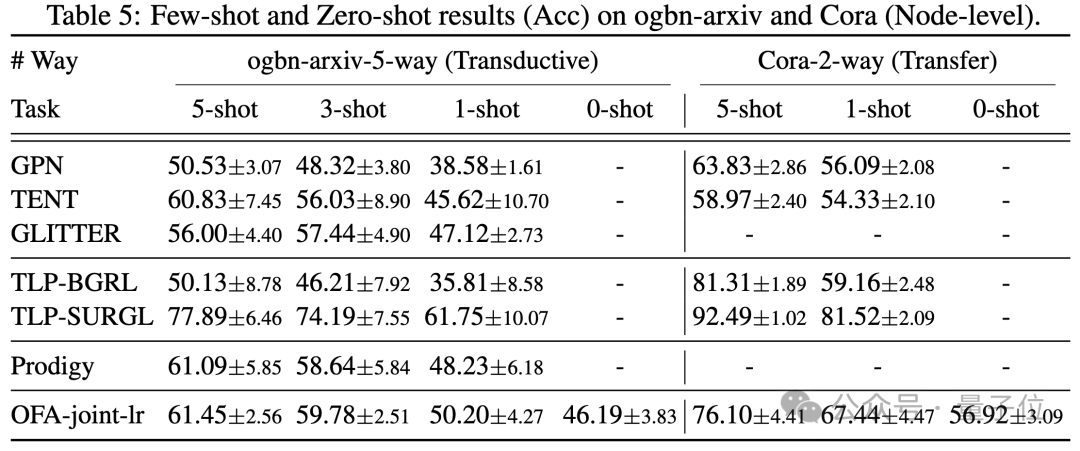
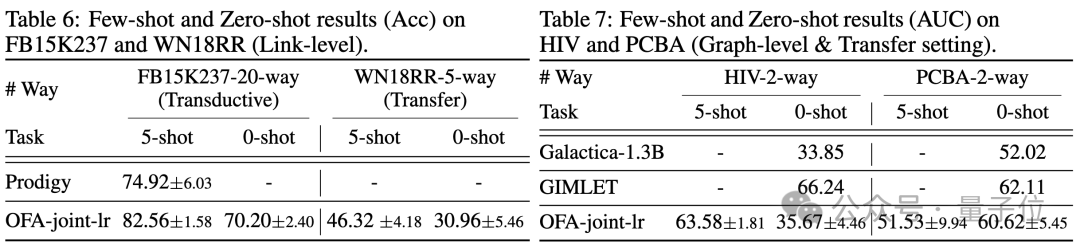
可以看到,即使在零樣本場景下,OFA依舊可以取得不錯的效果。綜合來看,實驗結果很好的驗證了OFA強大的通用性能以及其作為圖領域基礎模型的潛力。
更多研究細節,可參考原論文。
網址:https://www.php.cn/link/dd4729902a3476b2bc9675e3530a852chttps://github.com/ LechengKong/OneForAll
以上是圖領域首個通用框架來了!入選ICLR\'24 Spotlight,任意資料集、分類問題都可搞定的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 全球最強開源 MoE 模型來了,中文能力比肩 GPT-4,價格僅 GPT-4-Turbo 的近百分之一
May 07, 2024 pm 04:13 PM
全球最強開源 MoE 模型來了,中文能力比肩 GPT-4,價格僅 GPT-4-Turbo 的近百分之一
May 07, 2024 pm 04:13 PM
想像一下,一個人工智慧模型,不僅擁有超越傳統運算的能力,還能以更低的成本實現更有效率的效能。這不是科幻,DeepSeek-V2[1],全球最強開源MoE模型來了。 DeepSeek-V2是一個強大的專家混合(MoE)語言模型,具有訓練經濟、推理高效的特點。它由236B個參數組成,其中21B個參數用於啟動每個標記。與DeepSeek67B相比,DeepSeek-V2效能更強,同時節省了42.5%的訓練成本,減少了93.3%的KV緩存,最大生成吞吐量提高到5.76倍。 DeepSeek是一家探索通用人工智
 替代MLP的KAN,被開源專案擴展到卷積了
Jun 01, 2024 pm 10:03 PM
替代MLP的KAN,被開源專案擴展到卷積了
Jun 01, 2024 pm 10:03 PM
本月初,來自MIT等機構的研究者提出了一種非常有潛力的MLP替代方法—KAN。 KAN在準確性和可解釋性方面表現優於MLP。而且它能以非常少的參數量勝過以更大參數量運行的MLP。例如,作者表示,他們用KAN以更小的網路和更高的自動化程度重現了DeepMind的結果。具體來說,DeepMind的MLP有大約300,000個參數,而KAN只有約200個參數。 KAN與MLP一樣具有強大的數學基礎,MLP基於通用逼近定理,而KAN基於Kolmogorov-Arnold表示定理。如下圖所示,KAN在邊上具
 特斯拉機器人進廠打工,馬斯克:手的自由度今年將達到22個!
May 06, 2024 pm 04:13 PM
特斯拉機器人進廠打工,馬斯克:手的自由度今年將達到22個!
May 06, 2024 pm 04:13 PM
特斯拉機器人Optimus最新影片出爐,已經可以在工廠裡打工了。正常速度下,它分揀電池(特斯拉的4680電池)是這樣的:官方還放出了20倍速下的樣子——在小小的「工位」上,揀啊揀啊揀:這次放出的影片亮點之一在於Optimus在廠子裡完成這項工作,是完全自主的,全程沒有人為的干預。而且在Optimus的視角之下,它還可以把放歪了的電池重新撿起來放置,主打一個自動糾錯:對於Optimus的手,英偉達科學家JimFan給出了高度的評價:Optimus的手是全球五指機器人裡最靈巧的之一。它的手不僅有觸覺
 快手版Sora「可靈」開放測試:生成超120s視頻,更懂物理,複雜運動也能精準建模
Jun 11, 2024 am 09:51 AM
快手版Sora「可靈」開放測試:生成超120s視頻,更懂物理,複雜運動也能精準建模
Jun 11, 2024 am 09:51 AM
什麼?瘋狂動物城被國產AI搬進現實了?與影片一同曝光的,是一款名為「可靈」全新國產影片生成大模型。 Sora利用了相似的技術路線,結合多項自研技術創新,生產的影片不僅運動幅度大且合理,還能模擬物理世界特性,具備強大的概念組合能力與想像。數據上看,可靈支持生成長達2分鐘的30fps的超長視頻,分辨率高達1080p,且支援多種寬高比。另外再劃個重點,可靈不是實驗室放出的Demo或影片結果演示,而是短影片領域頭部玩家快手推出的產品級應用。而且主打一個務實,不開空頭支票、發布即上線,可靈大模型已在快影
 全面超越DPO:陳丹琦團隊提出簡單偏好優化SimPO,也煉出最強8B開源模型
Jun 01, 2024 pm 04:41 PM
全面超越DPO:陳丹琦團隊提出簡單偏好優化SimPO,也煉出最強8B開源模型
Jun 01, 2024 pm 04:41 PM
為了將大型語言模型(LLM)與人類的價值和意圖對齊,學習人類回饋至關重要,這能確保它們是有用的、誠實的和無害的。在對齊LLM方面,一種有效的方法是根據人類回饋的強化學習(RLHF)。儘管RLHF方法的結果很出色,但其中涉及了一些優化難題。其中涉及訓練一個獎勵模型,然後優化一個策略模型來最大化該獎勵。近段時間已有一些研究者探索了更簡單的離線演算法,其中之一就是直接偏好優化(DPO)。 DPO是透過參數化RLHF中的獎勵函數來直接根據偏好資料學習策略模型,這樣就無需顯示式的獎勵模型了。此方法簡單穩定
 美國空軍高調展示首個AI戰鬥機!部長親自試駕全程未乾預,10萬行代碼試飛21次
May 07, 2024 pm 05:00 PM
美國空軍高調展示首個AI戰鬥機!部長親自試駕全程未乾預,10萬行代碼試飛21次
May 07, 2024 pm 05:00 PM
最近,軍事圈被這個消息刷屏了:美軍的戰鬥機,已經能由AI完成全自動空戰了。是的,就在最近,美軍的AI戰鬥機首次公開,揭開了神秘面紗。這架戰鬥機的全名是可變穩定性飛行模擬器測試飛機(VISTA),由美空軍部長親自搭乘,模擬了一對一的空戰。 5月2日,美國空軍部長FrankKendall在Edwards空軍基地駕駛X-62AVISTA升空注意,在一小時的飛行中,所有飛行動作都由AI自主完成! Kendall表示——在過去的幾十年中,我們一直在思考自主空對空作戰的無限潛力,但它始終顯得遙不可及。然而如今,
 無需OpenAI數據,躋身程式碼大模型榜單! UIUC發表StarCoder-15B-Instruct
Jun 13, 2024 pm 01:59 PM
無需OpenAI數據,躋身程式碼大模型榜單! UIUC發表StarCoder-15B-Instruct
Jun 13, 2024 pm 01:59 PM
在软件技术的前沿,UIUC张令明组携手BigCode组织的研究者,近日公布了StarCoder2-15B-Instruct代码大模型。这一创新成果在代码生成任务取得了显著突破,成功超越CodeLlama-70B-Instruct,登上代码生成性能榜单之巅。StarCoder2-15B-Instruct的独特之处在于其纯自对齐策略,整个训练流程公开透明,且完全自主可控。该模型通过StarCoder2-15B生成了数千个指令,响应对StarCoder-15B基座模型进行微调,无需依赖昂贵的人工标注数
 LLM全搞定! OmniDrive:集3D感知、推理規劃於一體(英偉達最新)
May 09, 2024 pm 04:55 PM
LLM全搞定! OmniDrive:集3D感知、推理規劃於一體(英偉達最新)
May 09, 2024 pm 04:55 PM
寫在前面&筆者的個人理解這篇論文致力於解決當前多模態大語言模型(MLLMs)在自動駕駛應用中存在的關鍵挑戰,即將MLLMs從2D理解擴展到3D空間的問題。由於自動駕駛車輛(AVs)需要針對3D環境做出準確的決策,這項擴展顯得格外重要。 3D空間理解對於AV來說至關重要,因為它直接影響車輛做出明智決策、預測未來狀態以及與環境安全互動的能力。目前的多模態大語言模型(如LLaVA-1.5)通常只能處理較低解析度的影像輸入(例如),這是由於視覺編碼器的分辨率限制,LLM序列長度的限制。然而,自動駕駛應用需
