

AI讀心術再升級!一副眼鏡直接控制波士頓機器狗,腦控機器人成真

還記得之前的AI讀心術嗎?最近,「心想事成」的能力再次進化,
——人類可以透過自己的想法直接控制機器人了!
麻省理工研究人員發布了Ddog專案。他們自主研發了一種腦機介面(BCI)設備,用於控制波士頓動力的機器狗Spot。
狗狗可以依照人類的想法,移動到特定區域、幫人拿東西、或拍照等。
相較於之前需要使用許多感測器的頭套來“讀心”,這次的腦機介面設備以無線眼鏡(AttentivU)的形式呈現。
影片中所呈現的行為雖然簡單,但這個系統的目的是將Spot改造為基本溝通工具,以幫助患有ALS、腦性麻痺或脊髓損傷等疾病的人士。
只需兩部iPhone和一副眼鏡,即可為絕望的人帶來實際幫助和關懷。
並且,我們將在相關的論文中看到,這個系統實際上建立在非常複雜的工程之上。

論文網址:https://doi.org/10.3390/s24010080
Ddog系統使用AttentivU作為腦機介面系統,感測器嵌入到鏡框中,用來測量一個人的腦電圖(EEG) 或大腦活動,以及眼電圖或眼球運動。
這項研究的基礎是MIT的Brain Switch,一種即時的閉環BCI,允許用戶與照顧者進行非語言和即時的交流。
Ddog系統成功率為83.4%,並且,這是在個人助理用例中首次將無線、非視覺BCI系統與Spot整合。
影片中我們可以看到腦際介面設備的演化之路,以及開發者的一些思考。
在此之前,研究團隊就已經完成了腦機介面與智慧家庭的交互,而現在完成了控制能夠移動和操作的機器人。
這些研究給了特殊人群一絲光明,讓他們有活下去的希望,甚至未來可以過得更好。
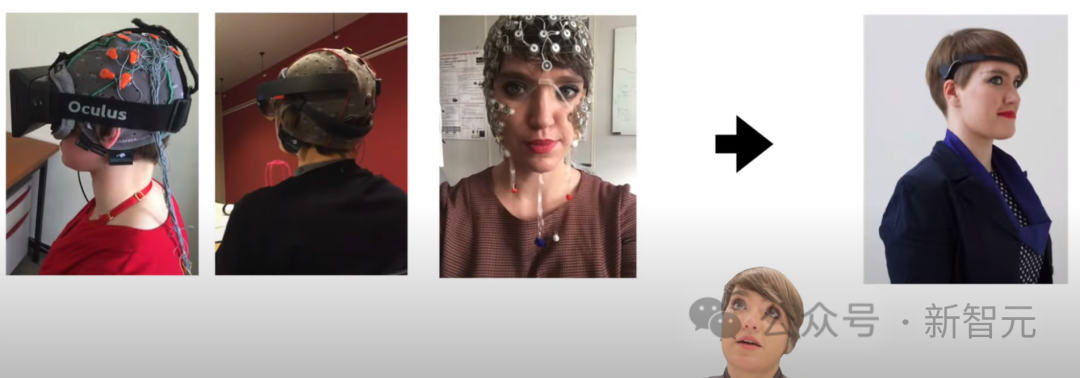
比起於章魚一樣的感測器頭套,下面這個眼鏡確實酷多了。

根據美國國家罕見疾病組織的數據,目前美國有30,000名ALS患者,且估計每年診斷出5,000例新病例。此外,根據《腦性麻痺指南》,約有100萬美國人患有腦性麻痺。
這些人中的許多人已經或最終將失去走路、穿衣服、說話、寫作甚至呼吸的能力。
雖然確實存在通訊輔助工具,但大多數是允許使用者使用電腦進行通訊的眼睛凝視設備。允許使用者與周圍世界互動的系統並不多。
這種BCI四足機器人系統作為一個早期的原型,為現代個人助理機器人的未來發展鋪平了道路。
希望在未來的迭代中,我們能看到更驚人的能力。
腦控四足機器人
在這項工作中,研究人員探索了無線和穿戴式BCI設備如何控制四足機器人—波士頓動力公司的Spot。
研究人員開發的設備透過嵌入眼鏡架中的電極測量使用者的腦電圖(EEG)和眼電圖(EOG)活動。
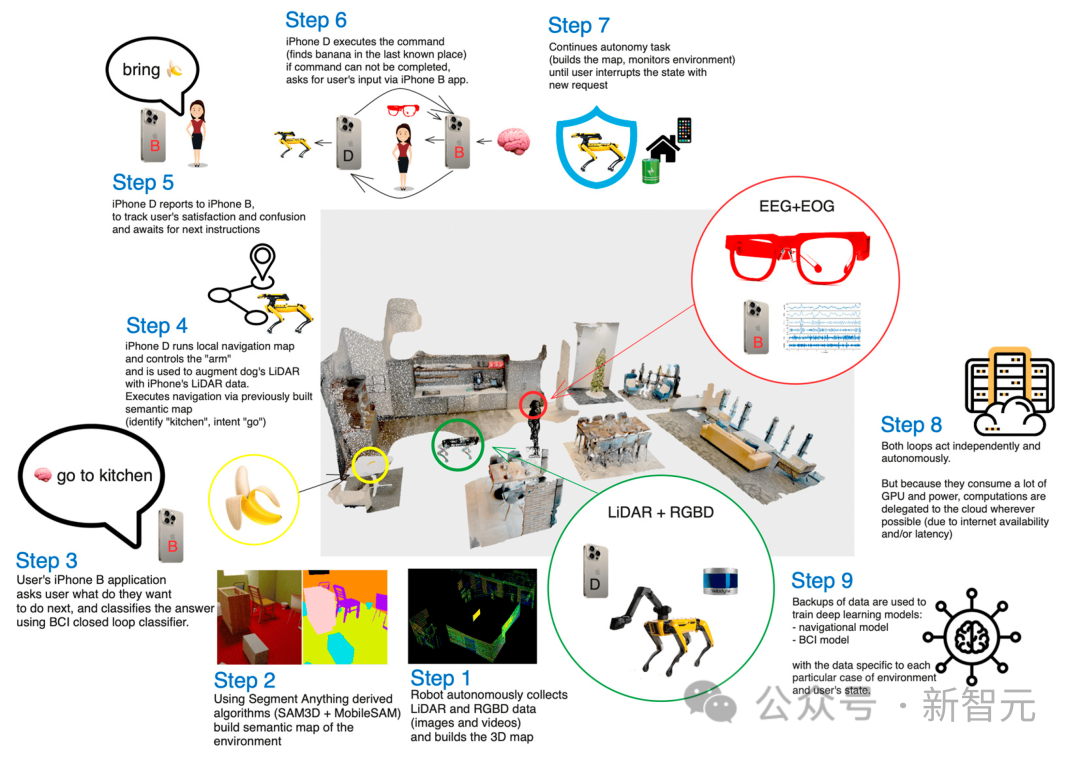
使用者在心中回答一系列問題(「是」或「否」),每個問答都對應一組預置的Spot操作。
例如提示Spot穿過一個房間,拿起一個物件(如一瓶水),然後為使用者取回它。
機器人與BCI
時至今日,腦電圖仍然是最實用且最適用的非侵入性腦機介面方法之一。
BCI系統可以使用內源性(自發性)或外源性(誘發)訊號進行控制。
在外源性腦機介面中,當一個人注意到外部刺激(如視覺或聽覺線索)時,就會出現誘發訊號。
這種方法的優點包括極簡的訓練以及高達60位元/分鐘的高位元率,但這需要用戶始終專注於刺激,從而限制了其在現實生活中的適用性。而且,使用者在使用外源性BCI時會很快感到疲倦。
在內源性腦機介面中,控制訊號獨立於任何外部刺激產生,可以由使用者按需完全執行。對於那些有感覺障礙的使用者來說,這提供了一種更自然和直觀的互動方式,使用者可以自發性地向系統發出命令。
不過這種方法通常需要更長的訓練時間,且位元率較低。
使用腦機介面的機器人應用通常適用於需要幫助的人群,它們通常包括輪椅和外骨骼。
下圖展示了截至2023年腦機介面和機器人技術的最新進展。
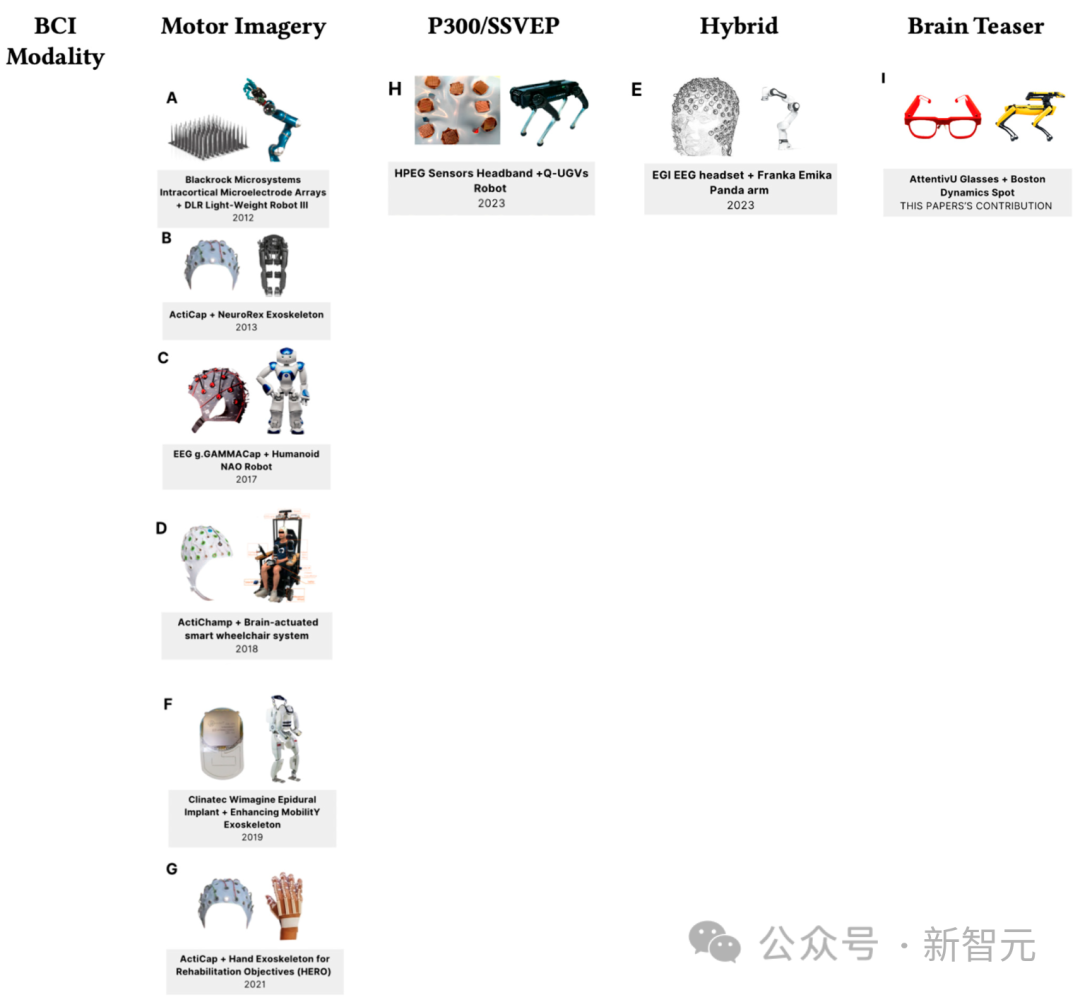
四足機器人通常用於在複雜的工作環境或國防應用中為使用者提供支援。
最著名的四足機器人之一是波士頓動力公司的Spot,它可以攜帶高達15公斤的有效載荷,並迭代繪製隧道等維護站點的地圖。房地產和採礦業也採用Spot等四足機器人,幫助監控具有複雜物流的工作現場。
本文使用移動BCI解決方案控制的Spot機器人,並基於心算任務,整體架構命名為Ddog。
Ddog架構
#下圖展示了Ddog的整體結構:
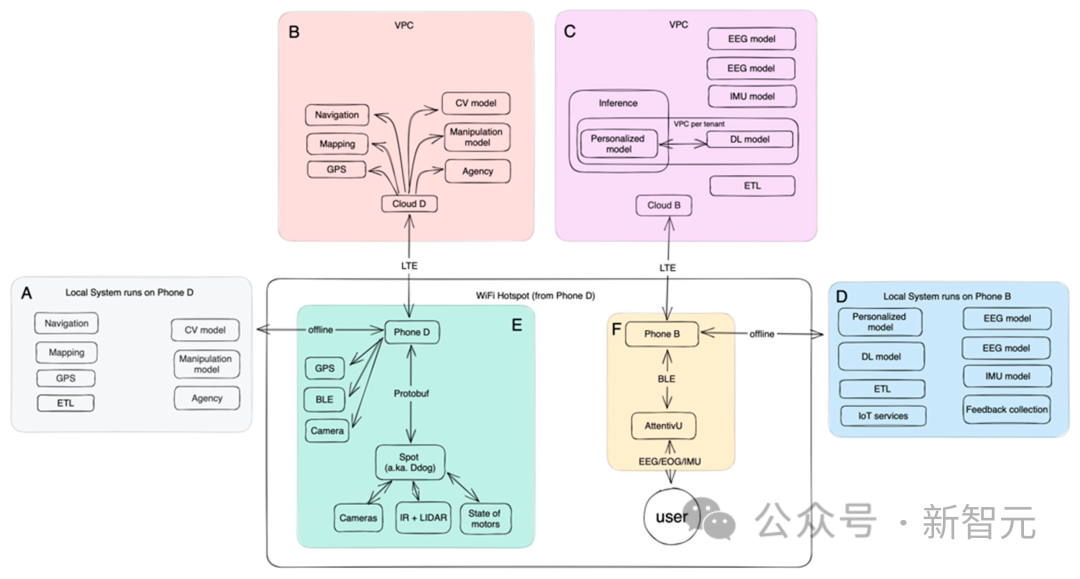
Ddog是一個自主應用程序,使用者能夠透過BCI的輸入控制Spot機器人,而應用程式使用語音向用戶及其護理人員提供回饋。
該系統設計為完全離線或完全在線工作。線上版本具有一組更高級的機器學習模型,以及更好的微調模型,對於本地設備也更省電。
整個系統為真實場景而設計,並允許對大多數零件進行快速迭代。
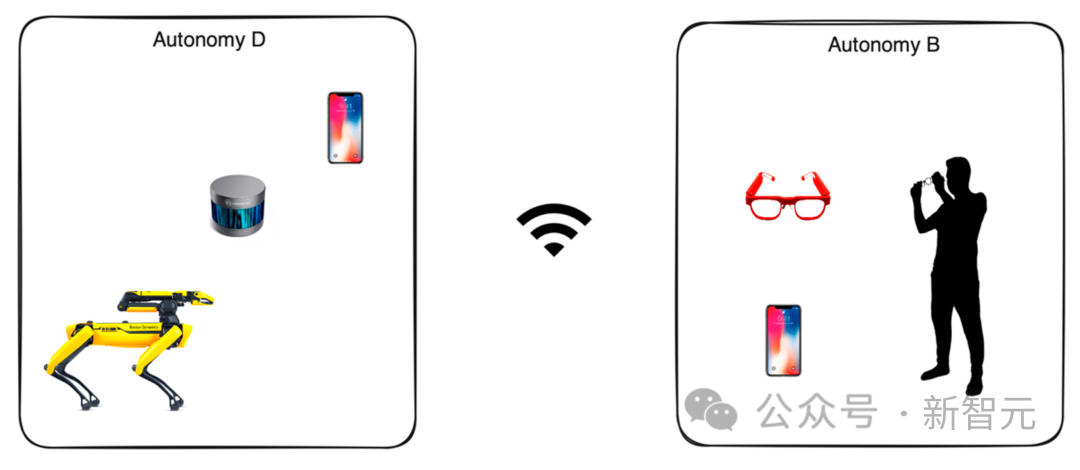
在客戶端,用戶透過行動應用程式與腦機介面裝置(AttentivU)進行交互,該應用程式使用低功耗藍牙( BLE)協定與設備進行通訊。
用戶的行動裝置與另一部控制Spot機器人的手機進行通信,以實現代理、操縱、導航,最終為用戶提供幫助。
手機之間的通訊可以透過Wi-Fi或行動網路。負責控制的手機建立一個Wi-Fi熱點,Ddog和用戶的手機都連接到這個熱點。使用線上模式時,還可以連接到雲端上運行的模型。
服務端
伺服器端使用Kubernetes(K8S)集群,每個集群都部署在自己的Virtual Private Cloud(VPC)中。
雲端在專用VPC內工作,通常部署在更靠近最終用戶的相同可用區中,使每個服務的回應延遲最小化。
叢集中的每個容器都設計為單一用途(微服務架構),每個服務都是正在運行的AI模型,它們的任務包括:導航、映射、電腦視覺、操縱、定位和代理。
映射:從不同來源收集有關機器人周圍環境資訊的服務。它會對應靜態的不可移動資料(一棵樹、一棟建築物、一面牆),但也收集隨時間變化的動態資料(一輛車、一個人)。
導航:基於先前服務中收集和擴充的地圖數據,導航服務負責在空間和時間上建立A點和B點之間的路徑。它還負責建立替代路線,以及估計所需的時間。
電腦視覺:從機器人相機收集視覺數據,並利用手機的數據增強,產生空間和時間表示。此服務還嘗試分割每個視覺點並識別物件。
雲負責訓練與BCI相關的模型,包括腦電圖(EEG)、眼電圖(EOG)和慣性測量單元(IMU)。
部署在手機上的離線模型運行資料收集和聚合,同時也使用TensorFlow的行動裝置模型(針對更小的RAM和基於ARM的CPU進行了最佳化)進行即時推理。
視覺和操作
用於部署分割模型的原始版本是利用LIDAR資料的單一TensorFlow 3D模型。之後,作者將其擴展到少樣本模型,並透過運行神經輻射場(NeRF)和RGBD資料的補充模型進行增強。
Ddog收集的原始資料是從五個攝影機匯總而來的。每個攝影機都可以提供灰階、魚眼、深度和紅外線數據。手臂的夾持器內部還有第六個鏡頭,具有4K解析度和LED功能,配合預先訓練的TensorFlow模型偵測物件。
點雲由雷射雷達資料以及由Ddog和手機的RGBD資料產生。資料收集完成後,透過單一座標系進行歸一化處理,並與匯集了所有成像和3D定位資料的全局狀態相符。
操作完全取決於安裝在 Ddog 上的機械手臂夾持器的質量,下圖的夾具由波士頓動力公司製造。
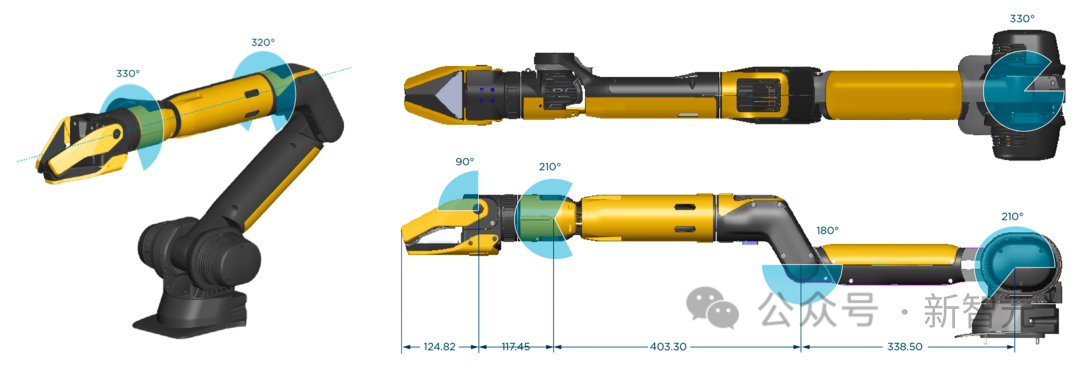
實驗中將用例限制在與預定義位置中的物件進行基本互動。
作者繪製了一個大的實驗室空間,將其設置為一個“公寓”,其中包含“廚房”區域(有一個裝有不同杯子和瓶子的托盤)、 「客廳」區域(帶枕頭的小沙發和小咖啡桌), 和「窗口休息室」區域。

用例的數量不斷增長,因此覆蓋大多數用例的唯一方法是部署一個系統以連續運行一段時間,並使用資料來優化此類序列和體驗。
AttentivU
腦電圖資料是從AttentivU裝置收集的。 AttentivU眼鏡的電極由天然銀製成,根據國際10-20電極放置系統,位於TP9和TP10位置。眼鏡還包括位於鼻託的兩個EOG電極和一個位於Fpz位置的EEG參考電極。
這些感測器可以提供所需的信息,並在需要時支援即時、閉環的干預。
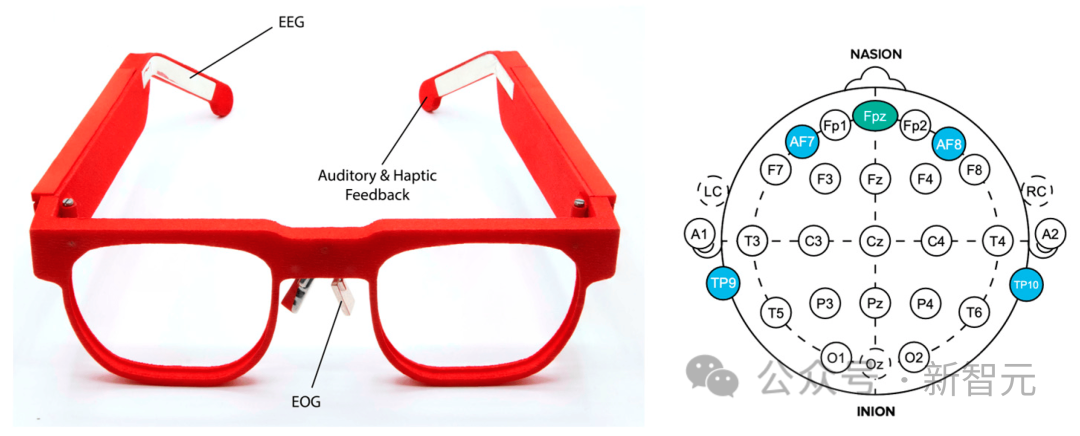
設備具有EEG和EOG兩種模式,可用於即時捕捉注意力、參與度、疲勞和認知負荷的訊號。 EEG已被用作清醒和睡眠之間過渡的神經生理學指標,
而EOG基於測量眼球運動過程中由於角膜-視網膜偶極子特性而誘導的生物電信號。研究表明,眼球運動與執行某些任務所需的記憶訪問類型相關,並且是視覺參與、注意力和嗜睡的良好衡量標準。
實驗
首先將腦電圖資料分成幾個視窗。將每個視窗定義為1秒長的EEG資料持續時間,與前一個視窗有75%的重疊。
然後是資料預處理和清理。使用50 Hz陷波濾波器和通帶為0.5 Hz至40 Hz的帶通濾波器的組合對資料進行濾波,以確保消除電力線雜訊和不必要的高頻。
接下來,作者創建了偽影拒絕演算法。如果兩個連續epoch之間的絕對功率差大於預先定義的閾值,則拒絕某個epoch。
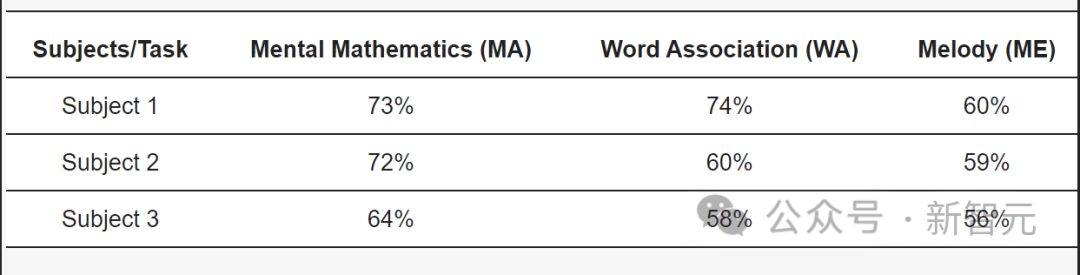
在分類的最後一步,作者混合使用不同的光譜波段功率比來追蹤每個受試者基於任務的心理活動。對於 MA,該比率為(alpha/delta)。對於WA,該比值為(delta/low beta),對於ME,該比值為(delta/alpha)。
然後,使用變化點偵測演算法來追蹤這些比率的變化。這些比率的突然增加或減少表明使用者精神狀態發生了變化。
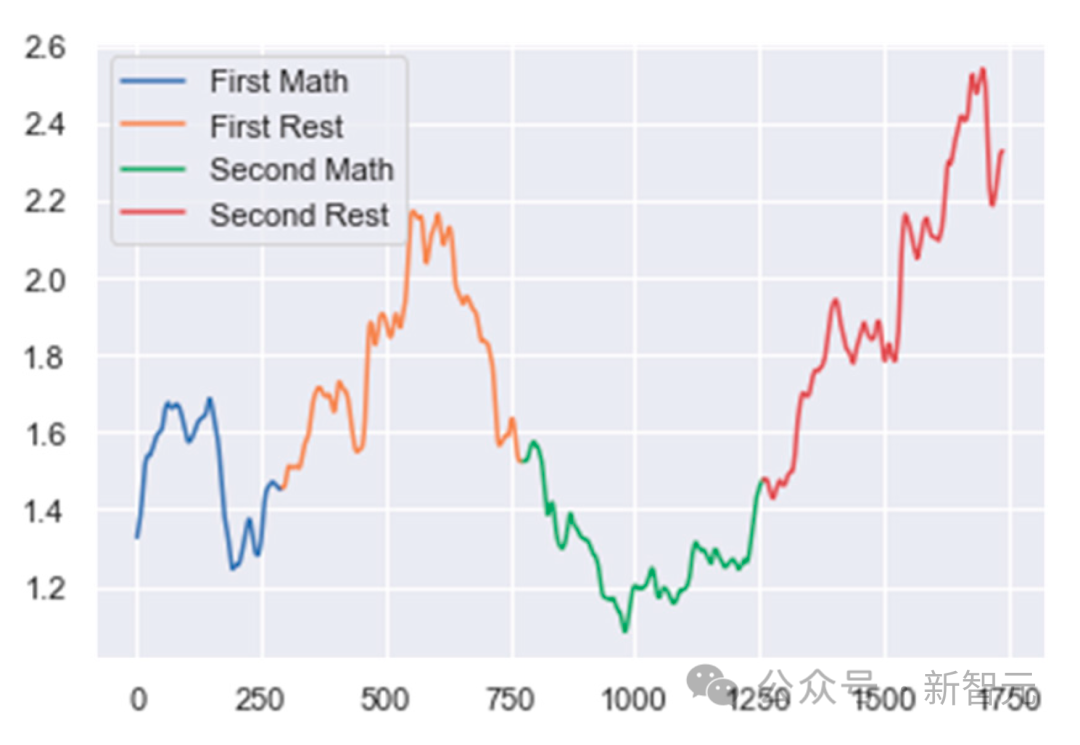
對於患有ALS的受試者,本文的模型在MA任務中達到了73%的準確率,在WA任務中達到了74%的準確率,在ME任務中達到了60%的準確率。
以上是AI讀心術再升級!一副眼鏡直接控制波士頓機器狗,腦控機器人成真的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 C 中的chrono庫如何使用?
Apr 28, 2025 pm 10:18 PM
C 中的chrono庫如何使用?
Apr 28, 2025 pm 10:18 PM
使用C 中的chrono庫可以讓你更加精確地控制時間和時間間隔,讓我們來探討一下這個庫的魅力所在吧。 C 的chrono庫是標準庫的一部分,它提供了一種現代化的方式來處理時間和時間間隔。對於那些曾經飽受time.h和ctime折磨的程序員來說,chrono無疑是一個福音。它不僅提高了代碼的可讀性和可維護性,還提供了更高的精度和靈活性。讓我們從基礎開始,chrono庫主要包括以下幾個關鍵組件:std::chrono::system_clock:表示系統時鐘,用於獲取當前時間。 std::chron
 如何理解C 中的DMA操作?
Apr 28, 2025 pm 10:09 PM
如何理解C 中的DMA操作?
Apr 28, 2025 pm 10:09 PM
DMA在C 中是指DirectMemoryAccess,直接內存訪問技術,允許硬件設備直接與內存進行數據傳輸,不需要CPU干預。 1)DMA操作高度依賴於硬件設備和驅動程序,實現方式因係統而異。 2)直接訪問內存可能帶來安全風險,需確保代碼的正確性和安全性。 3)DMA可提高性能,但使用不當可能導致系統性能下降。通過實踐和學習,可以掌握DMA的使用技巧,在高速數據傳輸和實時信號處理等場景中發揮其最大效能。
 數字貨幣app是啥軟件?全球數字貨幣十大app盤點
Apr 30, 2025 pm 07:06 PM
數字貨幣app是啥軟件?全球數字貨幣十大app盤點
Apr 30, 2025 pm 07:06 PM
隨著數字貨幣的普及和發展,越來越多的人開始關注和使用數字貨幣app。這些應用程序為用戶提供了便捷的管理和交易數字資產的方式。那麼,數字貨幣app到底是什麼軟件呢?讓我們深入了解,並盤點全球十大數字貨幣app。
 怎樣在C 中處理高DPI顯示?
Apr 28, 2025 pm 09:57 PM
怎樣在C 中處理高DPI顯示?
Apr 28, 2025 pm 09:57 PM
在C 中處理高DPI顯示可以通過以下步驟實現:1)理解DPI和縮放,使用操作系統API獲取DPI信息並調整圖形輸出;2)處理跨平台兼容性,使用如SDL或Qt的跨平台圖形庫;3)進行性能優化,通過緩存、硬件加速和動態調整細節級別來提升性能;4)解決常見問題,如模糊文本和界面元素過小,通過正確應用DPI縮放來解決。
 C 中的實時操作系統編程是什麼?
Apr 28, 2025 pm 10:15 PM
C 中的實時操作系統編程是什麼?
Apr 28, 2025 pm 10:15 PM
C 在實時操作系統(RTOS)編程中表現出色,提供了高效的執行效率和精確的時間管理。 1)C 通過直接操作硬件資源和高效的內存管理滿足RTOS的需求。 2)利用面向對象特性,C 可以設計靈活的任務調度系統。 3)C 支持高效的中斷處理,但需避免動態內存分配和異常處理以保證實時性。 4)模板編程和內聯函數有助於性能優化。 5)實際應用中,C 可用於實現高效的日誌系統。
 怎樣在C 中測量線程性能?
Apr 28, 2025 pm 10:21 PM
怎樣在C 中測量線程性能?
Apr 28, 2025 pm 10:21 PM
在C 中測量線程性能可以使用標準庫中的計時工具、性能分析工具和自定義計時器。 1.使用庫測量執行時間。 2.使用gprof進行性能分析,步驟包括編譯時添加-pg選項、運行程序生成gmon.out文件、生成性能報告。 3.使用Valgrind的Callgrind模塊進行更詳細的分析,步驟包括運行程序生成callgrind.out文件、使用kcachegrind查看結果。 4.自定義計時器可靈活測量特定代碼段的執行時間。這些方法幫助全面了解線程性能,並優化代碼。
 量化交易所排行榜2025 數字貨幣量化交易APP前十名推薦
Apr 30, 2025 pm 07:24 PM
量化交易所排行榜2025 數字貨幣量化交易APP前十名推薦
Apr 30, 2025 pm 07:24 PM
交易所內置量化工具包括:1. Binance(幣安):提供Binance Futures量化模塊,低手續費,支持AI輔助交易。 2. OKX(歐易):支持多賬戶管理和智能訂單路由,提供機構級風控。獨立量化策略平台有:3. 3Commas:拖拽式策略生成器,適用於多平台對沖套利。 4. Quadency:專業級算法策略庫,支持自定義風險閾值。 5. Pionex:內置16 預設策略,低交易手續費。垂直領域工具包括:6. Cryptohopper:雲端量化平台,支持150 技術指標。 7. Bitsgap:
 給MySQL表添加和刪除字段的操作步驟
Apr 29, 2025 pm 04:15 PM
給MySQL表添加和刪除字段的操作步驟
Apr 29, 2025 pm 04:15 PM
在MySQL中,添加字段使用ALTERTABLEtable_nameADDCOLUMNnew_columnVARCHAR(255)AFTERexisting_column,刪除字段使用ALTERTABLEtable_nameDROPCOLUMNcolumn_to_drop。添加字段時,需指定位置以優化查詢性能和數據結構;刪除字段前需確認操作不可逆;使用在線DDL、備份數據、測試環境和低負載時間段修改表結構是性能優化和最佳實踐。
