原標題:SIMPL: A Simple and Efficient Multi-agent Motion Prediction Baseline for Autonomous Driving
論文連結:https://arxiv.org/pdf/2402.02519.pdf

#程式碼連結:https://github.com/HKUST-Aerial-Robotics/SIMPL
作者單位:香港科技大學大疆
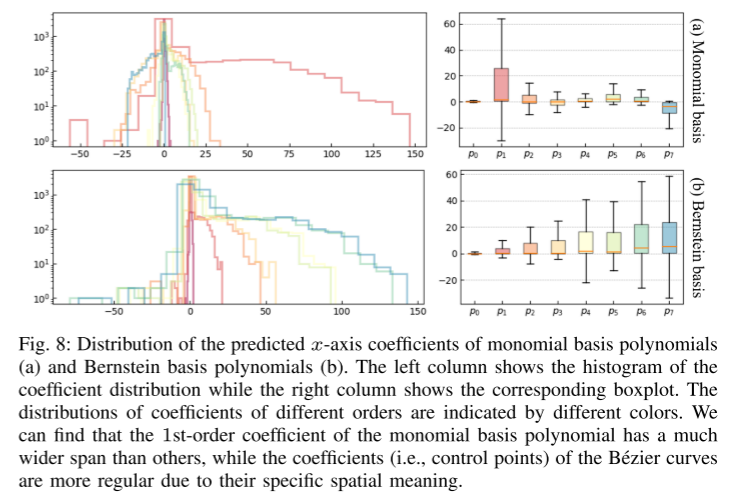
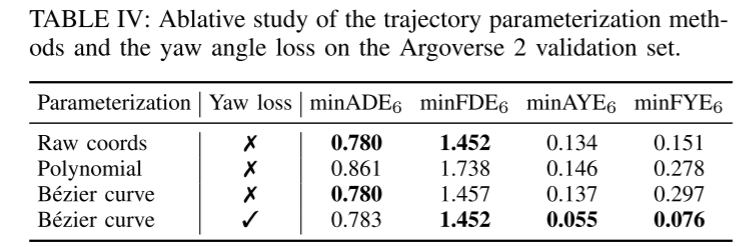
#### ##論文想法:#########本文提出了一種用於自動駕駛車輛的簡單高效的運動預測基線(SIMPL)。與傳統的以代理為中心(agent-centric) 的方法(精度高但需要重複計算)和以場景為中心(scene-centric) 的方法(精度和通用性受到影響)不同,SIMPL 可以為所有相關交通參與者提供即時、準確的運動預測。為了提高準確性和推理速度,本文提出了一個緊湊而高效的全局特徵融合模組,該模組以對稱方式執行定向訊息傳遞,使網路能夠在單次前饋傳遞中預測所有道路使用者的未來運動,並減輕視點移動所導致的精度損失。此外,本文研究了在軌跡解碼中使用 Bernstein basis polynomials 進行連續軌跡參數化,允許在任何所需時間點評估狀態及其高階導數,這對於下游規劃任務很有價值。作為強大的基線,與其他最先進的方法相比,SIMPL 在 Argoverse 1 和 2 運動預測基準上表現出極具競爭力的性能。此外,其輕量級設計和低推理延遲使 SIMPL 具有高度可擴展性,並有望用於現實世界的機載部署。 #########網路設計:#########預測周圍交通參與者的運動對自動駕駛汽車至關重要,尤其是在下游決策和規劃模組中。準確預測意圖和軌跡將提高安全性和乘坐舒適性。 ######對於基於學習的運動預測,最重要的主題之一是上下文表示。早期的方法通常將周圍場景表示為多通道鳥瞰影像 [1]–[4]。相較之下,最近的研究越來越多地採用向量化場景表示[5]-[13],其中使用帶有地理座標的點集或多段線(polylines) 來標註位置和幾何形狀,從而提高保真度並擴大感受野。然而,對於光柵化和向量化表示,都存在一個關鍵問題:我們應該如何為所有這些元素選擇合適的參考系?一種直接的方法是描述共享座標系(以場景為中心)內的所有實例,例如以自動駕駛車輛為中心的座標系,並直接使用座標作為輸入特徵。這使我們能夠在一次前饋傳遞中對多個目標代理進行預測 [8, 14]。然而,使用全域座標作為輸入,通常會在單一前饋傳遞中對多個目標代理進行預測 [8, 14]。然而,使用全域座標作為輸入(通常在很大範圍內變化)將大大加劇任務的固有複雜性,導致網路效能下降和對新場景的適應性有限。為了提高準確性和穩健性,常見的解決方案是根據目標代理人的當前狀態對場景上下文進行歸一化處理 [5, 7, 10]-[13](以代理為中心)。這意味著必須對每個目標代理重複執行歸一化過程和特徵編碼,從而獲得更好的效能,但代價是冗餘計算。因此,有必要探索一種能夠有效編碼多個目標的特徵,同時保持對視角(perspective) 變化的穩健性的方法。 ######對於運動預測的下游模組,例如決策和運動規劃,不僅需要考慮未來位置,還需要考慮航向、速度和其他高階導數。例如,周圍車輛的預測航向在塑造未來時空佔用方面發揮關鍵作用,這是確保安全和穩健的運動規劃的關鍵因素[15, 16]。此外,在不遵守物理約束的情況下獨立預測高階量可能會導致預測結果不一致[17, 18]。例如,儘管速度為零,但它可能會產生位置位移,從而導致規劃模組混亂。 ######本文介紹了一種名為SIMPL(簡單且高效的運動預測基準)的方法,用於解決自動駕駛系統中多智能體軌跡預測的關鍵問題。此方法首先採用以實例為中心的場景表示,然後引入了symmetric fusion Transformer(SFT)技術,能夠在單次前饋傳遞中有效地預測所有代理的軌跡,同時保持視角不變性的準確性和穩健性。與其他基於對稱情境融合的方法相比,SFT更簡單、更輕量級且更易實現,適合在車載環境中部署使用。 ######其次,本文引入了一種基於 Bernstein basis polynomial(也稱為 Bezier curve)的預測軌蹟的新穎參數化方法。這種連續表示確保了平滑性,並能夠在任何給定時間點輕鬆評估精確狀態及其高階導數。本文的實證研究表明,與估計 monomial basis polynomials 的係數相比,學習預測 Bezier curves 的控制點更有效且數值穩定。 ###
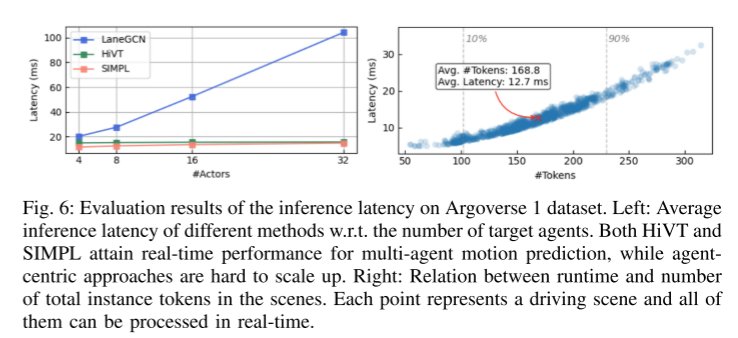
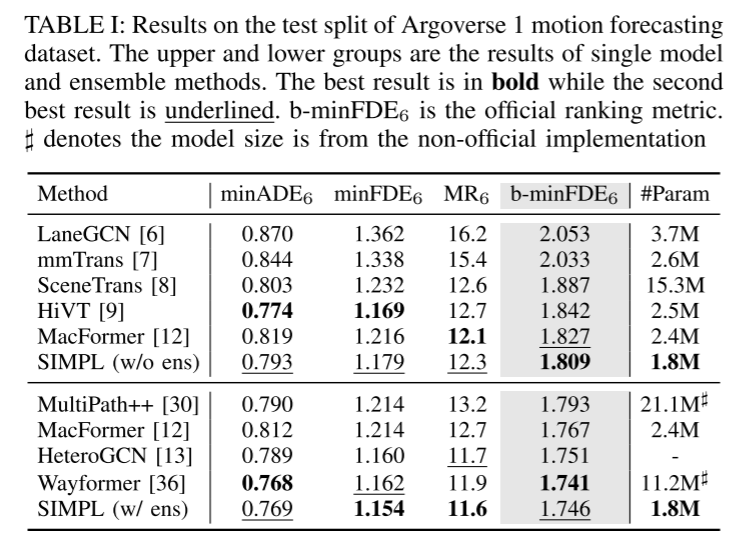
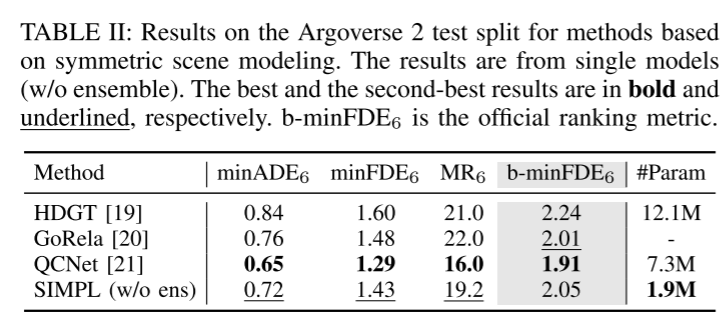
最後,所提出的元件被很好地整合到一個簡單而高效的模型中。本文在兩個大型運動預測資料集上評估了所提出的方法[22, 23],實驗結果表明,儘管 SIMPL 具有簡化的設計,但與其他最先進的方法相比仍具有很強的競爭力。更重要的是,SIMPL透過較少的可學習參數和較低的推理延遲實現了高效的多智能體軌跡預測,而沒有犧牲量化性能,這對於真實世界的機載部署來說是充滿希望的。本文也強調,作為一個強大的基線,SIMPL 具有出色的可擴展性。簡潔的架構便於與最新的運動預測進展直接整合,為進一步提高整體表現提供了機會。
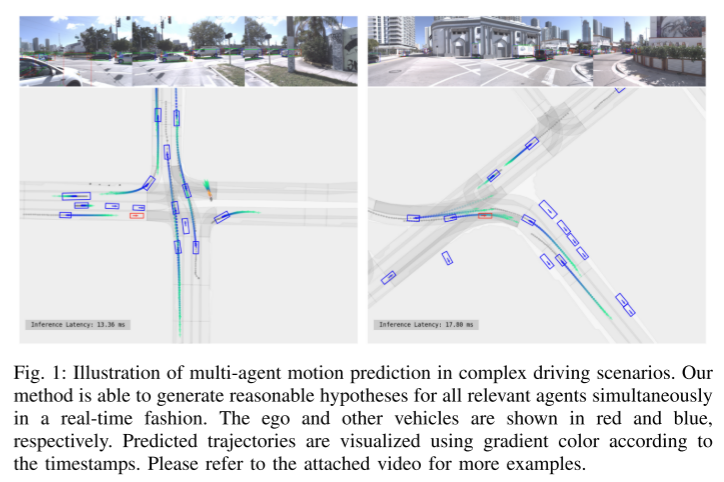
圖 1:複雜駕駛場景中多智能體運動預測的圖示。本文的方法能夠即時地同時為所有相關代理程式產生合理的假設。自車和其他車輛分別以紅色和藍色顯示。根據時間戳記使用漸層顏色來視覺化預測軌跡。請參考附帶的影片以了解更多範例。
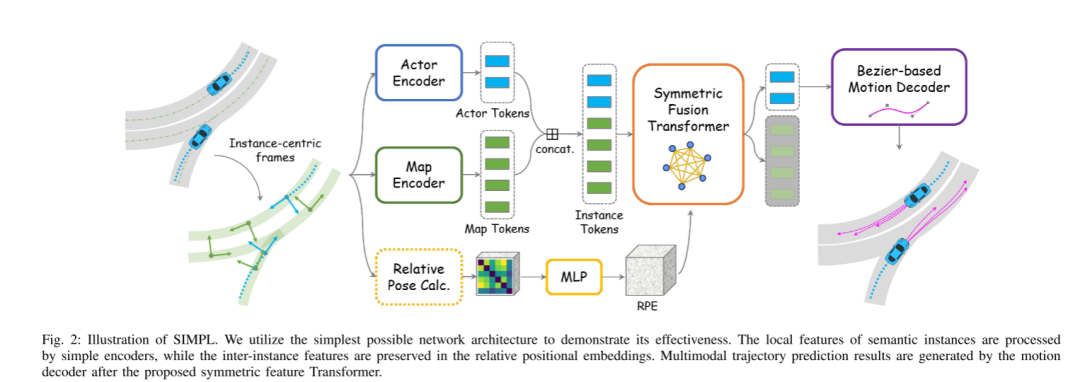
圖 2:SIMPL 示意圖。本文利用盡可能簡單的網路架構來證明其有效性。語意實例的局部特徵由簡單的編碼器處理,而實例間特徵則保留在相對位置嵌入中。多模態軌跡預測結果由運動解碼器在提出的 symmetric feature Transformer 之後產生。
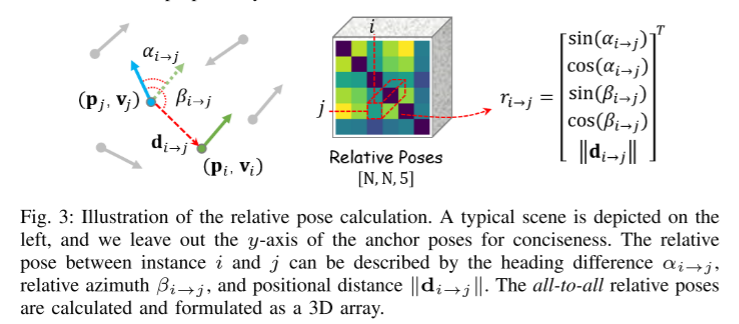
圖 3:相對位姿計算示意圖。
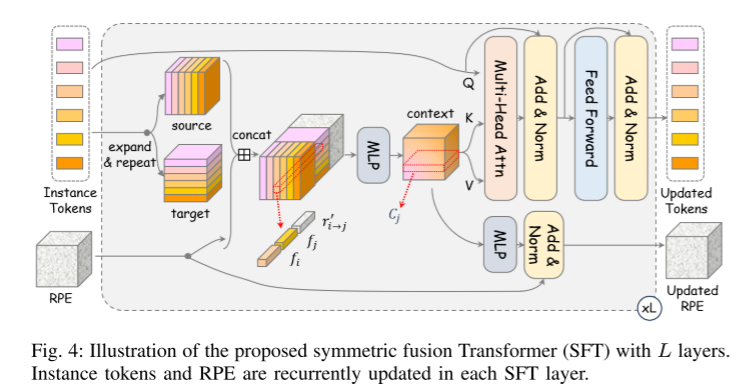
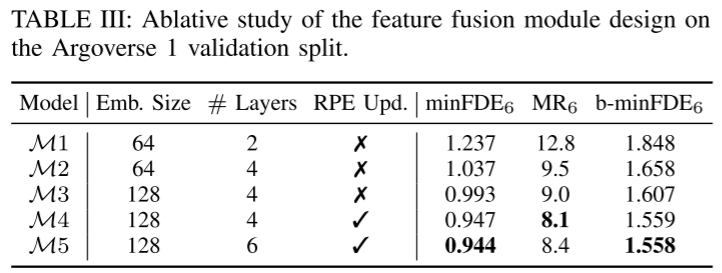
圖 4:所提出的 L 層 symmetric fusion Transformer (SFT) 的圖示。實例 tokens 和相對位置嵌入(RPE)在每個SFT層中都會循環更新。
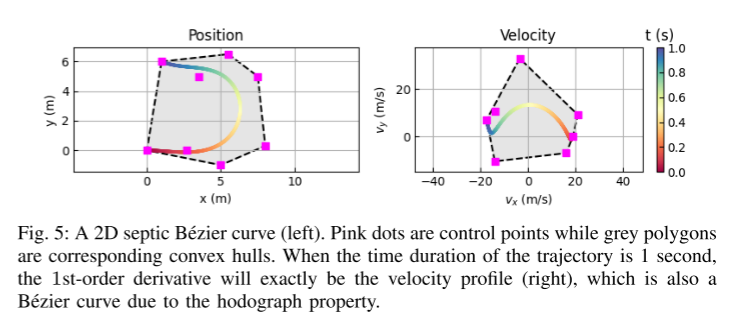
圖 5:2D septic Bezier curve(左)。
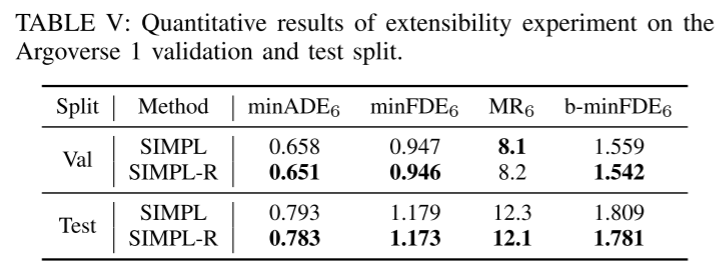
實驗結果:
##總結:
本文提出了一個簡單且有效率的自動駕駛多智能體運動預測基準。利用所提出的 symmetric fusion Transformer,所提出的方法實現了高效的全局特徵融合,並保持了針對視點移動的穩健性。基於 Bernstein basis polynomials 的連續軌跡參數化提供了與下游模組更高的相容性。在大規模公共資料集上的實驗結果表明,SIMPL 在模型大小和推理速度方面更具優勢,同時獲得與其他最先進方法相同程度的精確度。 ######引用:#########Zhang L, Li P, Liu S, et al. SIMPL: A Simple and Efficient Multi-agent Motion Prediction Baseline for Autonomous Driving[J] . arXiv preprint arXiv:2402.02519, 2024.#########
以上是SIMPL:用於自動駕駛的簡單高效的多智能體運動預測基準的詳細內容。更多資訊請關注PHP中文網其他相關文章!






















