
看過BEV障礙物故事的同學應該清楚,我們組是在21年10月左右開始做BEV 障礙物的。那時候不敢想著要做BEV 車道線,因為沒有人力。但我記得在12月左右的時候,我們面到了一個候選人,在面試的過程中聽到他們做了差不多半年多的BEV 車道線,整個技術路線是通過高精地圖來作為BEV 車道線網絡的訓練真值,並說效果還不錯。很遺憾,那個候選人最後沒有來我們這裡。結合21年Telsa AI day 講的車道線內容,一個要做BEV 車道線的種子就這樣在組內埋下了。
整個22年,我們組內人力都是很緊張的,我記得在6,7月份的時候,我們剛好有人力去探索一下BEV 車道線。但當時我們組只有一個同學(我們就先叫他小軒同學吧)有2個月的時間去做這件事。然後21年的那顆種子開始發芽了,我們準備先從數據下手,小軒同學還是很給力的(很有想像力,後續小軒同學也做了更多令大家驚喜的東西),差不多用了2月的時間,我們可以透過高速高精地圖來擷取對應的車周圍的車道線資料。當時做出來的時候,我記得大家還是很激動的。
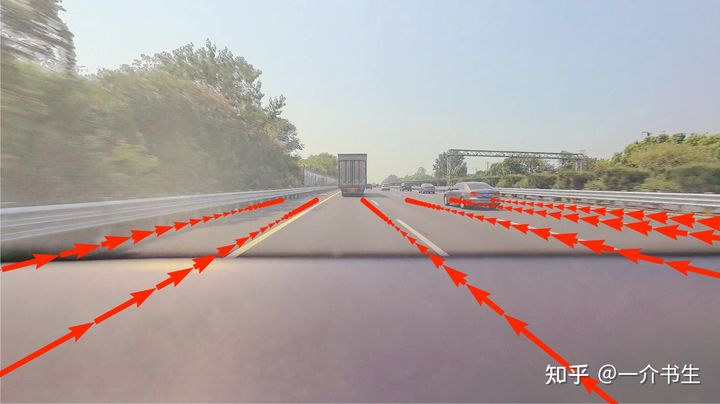
圖1: 高精地圖車道線投影到影像系的效果
大家從圖1可以看出,貼合對還是有一些問題,因此小軒同學又做了系列的優化。 2個月後,小軒同學去做其他任務了,現在回頭看,我們的BEV 車道線探索之路,已經走對了第一步。因為在21年,22年已經逐步有許多優秀的BEV 車道線論文和程式碼相繼開源。看到這裡,你可能以為23年一定有一個完美美的BEV 車道線落地的故事,然後理想往往都很豐滿,現實卻是很殘酷。
由於我們BEV 障礙物已經證明BEV 這條路是可以走下去了,並且在路測也表現出了不錯的效果。組內開始有了更多的資源來考慮車道線這件事,注意這裡不是BEV了。為什麼呢?因為在這個時候,我們面臨了很大的上線壓力,BEV 車道線又沒有足夠的經驗,或者說整個組內做過2D 車道線量產的人都幾乎沒有。 23年前半年,真的可以用跌跌撞撞來形容,我們內部激烈的討論了很多次,最後決定形成2條線,一條線為2D 車道線: 大部分的人力在2D 車道線這條線上,重後處理,輕模型,透過2D 車道線這條線來累積車道線後處理量產經驗。一條線為BEV 車道線:只有一小部分人力(其實就1-2個人力),注重BEV 車道線的模型設計, 累積模型經驗。 BEV 車道線的網路已經很多了,我在這裡貼2篇對我們影響比較大的論文供大家參考。 《HDMapNet: An Online HD Map Construction and Evaluation Framework》 和《MapTR: Structured Modeling and Learning for Online Vectorized HD Map Construction》
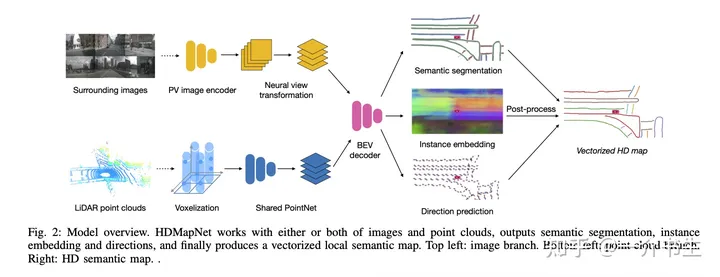
圖2: HDMapNet

圖3 MapTR
很幸運,在4,5月份的時候,我們在2D 車道線這條線累積了大量的車道線後處理量產經驗,我們的BEV 車道線網路也設計出來了,在5月底,很快BEV 車道線順利上車。這裡不得不說一下我們負責車道線後處理的大海同學,還是很有力的。然而當你覺得很順利的時候,往往惡夢就要開始了。 BEV 車道線部署後,控車效果不理想,這個時候大家陷入了自我懷疑階段,到底是因為BEV 車道線3次樣條曲線擬合的問題,還是下游參數沒有適配好的問題。萬幸的是,我們車上有供應商的效果,我們在路測時把供應商的車道線結果保存下來,然後在可視化工具裡面在和我們的結果對比。當控車效果不好的時候,先證明我們自己的車道線品質是沒有問題,這樣驅動下游來適應我們的BEV車道線。一個月,整整一個月的時間,我們才穩定控車。我記得很清楚,我們還從上海跑到蘇州,那天還是週六,大家在群組裡看到高速的控車效果都很激動。
然而一個故事往往都是一波三折的,我們只能利用高速高精地圖來生產車道線資料。城市怎麼辦,還有這麼多badcase 要解決。這時候重要人物終於要出現了,我們就先叫他小糖同學吧(我們數據組的大管家)。小糖同學他們利用點雲重建來重建我們重建clip(這個過程還蠻痛苦,我記得那兩個月是他們壓力最大的時候,哈哈,當然我們和小糖同學常常相愛相殺,畢竟常常在開會時常常說又沒有數據了。)。然後重建出來後怎麼標註,放眼當時手上的供應商們,都沒有這樣的標註工具,別說什麼標註經驗了。又是和小糖同學他們一起,經歷了漫長的1個月時間,標註工具終於和供應商打磨好了。 (我們經常開玩笑說,我們這是在賦能整個自動駕駛的標註行業,這個過程是真痛苦,重建clip 加載是真慢 )。然而整個標註還是比較慢的,或者比較貴,這個時候小軒同學帶著他的車道線預標註大模型閃亮登場(車道線預標註的大模型效果還是槓槓的),大家看他的眼神都在閃閃發光。這套組合拳頭打下來,我們的車道線資料生產終於是磨合的差不多了。 8月的時候我們的BEV 車道線控車道線已經迭代的不錯了,對於簡單的高速領航功能。現在小軒同學在大模型預標註方向依舊不斷的給我們帶來更多的驚喜,我們和小糖同學依舊在相愛相殺中。
然而一個故事都不是這麼容易結束,我們在9月份的時候,開始動手做多模態(Lidar,camera,Radar)多任務(車道線,障礙物,Occ)前融合模型,並後續支持城市領航功(NCP), 也就是所謂的重感知,輕地圖的方案。基於BEV障礙物和BEV 車道線的經驗前融合網路我們很快就部署上車了,應該是在9月底的時候。車道線也加了很多子任務,路面標識別,路口的拓樸等等。在這個過程中,我們對BEV 車道線的後處理進行了升級,拋棄了車道線3次樣條曲線擬合,而採用點的跟踪方案,點的跟踪方案和我們的車道線模型的輸出可以很好的結合在一起。這個過程也是一個痛苦的,我們連續2個月,每週開一次專項會,畢竟我們已經基於擬合的方案做的不錯了,但是為了更高的上限,只能痛并快樂著。最終目前我們已經把基礎的功能進行路測了。
稍微跟大家解釋一下圖4,左邊是車道線點追蹤的效果目前我們模型的感知範圍只有前80米,大家可以看到車後也有一些點,這是追蹤留下的。右邊是我們的建立的即時感知圖,當然現在還在一個快速迭代的過程,還有很多問題正在解決中。
時刻,站在24年回看我們從21年到現在的一路成長和積累,很慶幸在21年那個點,有機會去做BEV, 也很慶幸有一群志同相合的小夥伴一路相輔相成。 24年,對我們來說,有很多東西需要去追尋,前融合模型的量產上線,資料方向的發力,時序模型的探索,端到端的暢想等等。
以上是一個關於BEV車道線落地的點點滴滴的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















