
外網有用戶放了一段特斯拉FSD v12的視頻,有人搬運到b站上了:
https://www.bilibili.com/video/BV1Z6421M797www.bilibili .com/video/BV1Z6421M797
這次恰好是一個純視覺方面較為複雜的場景:下雨天地面積水,水面上反射出各種圖案,可能會產生一些奇異的視覺效果。特斯拉去年沒有舉辦ai day活動,據稱是因為競爭對手經常挑撥他們的幻燈片,所以乾脆取消了。在缺乏詳細資訊的情況下,觀察影片可以略窺一些端到端的特性。接下來,讓我們針對其中一些有趣的地方進行分析。
01:57,誤檢車門打開,大幅度繞行:

#這裡倒是問題不大,左邊有比較大的空間,所以多繞一點也無所謂了。
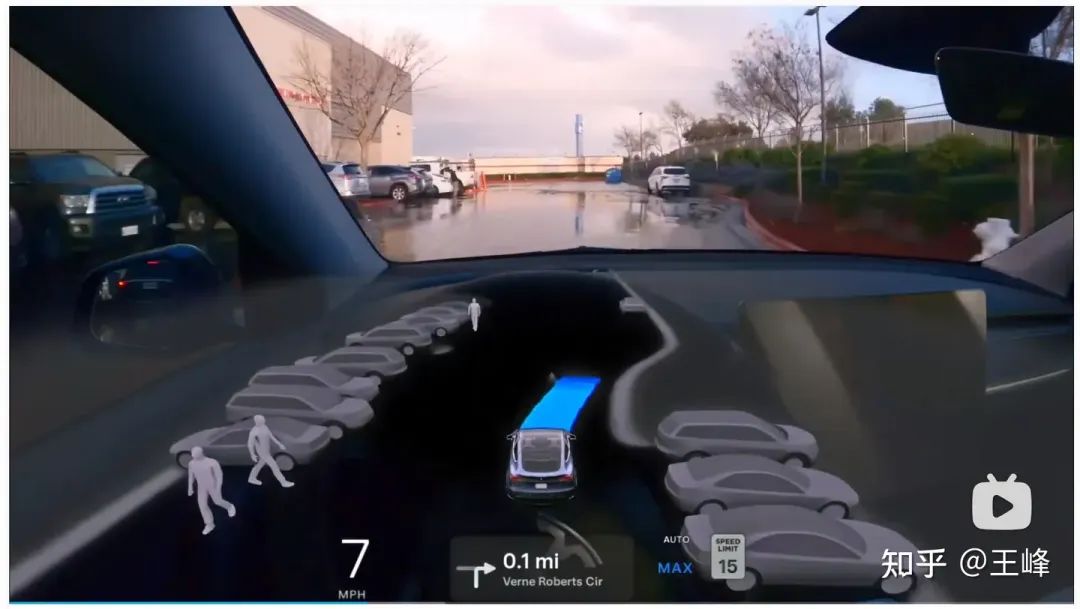
02:09,誤檢occ導致幾乎剎停:

#行人已經離開,我們可以開始前進了。然而,地面上有很多積水,反射著物體的影像,這可能導致誤檢測,所以我們又停下來等了一會兒才繼續前進。
04:40,近距離cutin車輛漏檢


#這裡左側非常近距離的倒車cut-in車輛漏檢了,但planning似乎並沒有給出起步的意圖,這裡體現出了端到端的一大優勢:上游出錯的結果並不一定會導致錯誤的駕駛行為,後面我們還會看到更多類似的例子。
05:37 誤檢occ

這裡可能也是地面積水產生的occ吧,端到端採信了這個結果,左右亂打方向盤,一會向左一會向右。
05:48,左右近距離occ誤檢

在左右非常近的位置出現了occ誤檢,如果還是按規則來寫可能就得報接管了(也不一定,畢竟沒有在行車軌跡上),這裡端到端直接無視了這兩坨occ,繼續開。
06:57,正前方近距離行人誤檢

這個是真的牛逼,臉上刷出來一個行人,所有基於規則的規控此時一定會急剎警報了,但端到端模型並不認可上游的結果,照常行駛。
14分:在一個私人停車場裡打轉出不去了
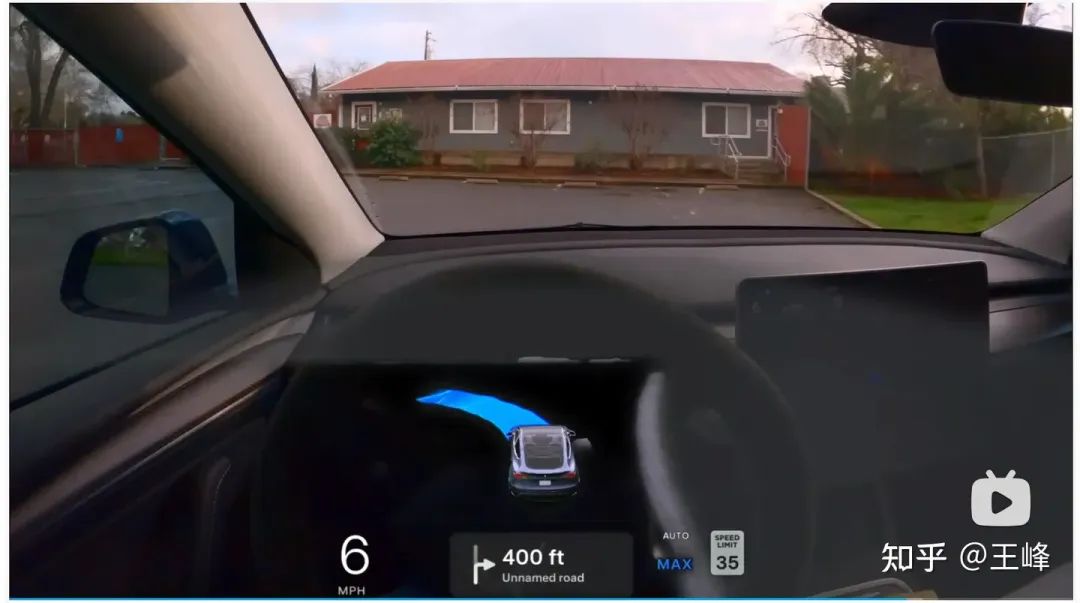
#這裡可能是BEV的感知距離不夠的問題,遲遲沒有找到出口,在一個停車場打轉。 。
其他的片段就都是主路上行駛了,到了主路上FSD v12的表現很絲滑,沒有什麼大問題,尤其是夜晚看車道線的檢測也是非常穩定的,不過我覺得大部分廠商也能做到這樣的水平,就不多提了。
單看停車場這一段,如果不看上游的結果的話,除了那個正前方occ誤檢導致左右亂打方向盤,FSD v12的軌跡還是比較絲滑的,即使有錯誤也沒有被卡住的情況。在這樣一個有行人、有不規則移動障礙物(手推車)、地面有積水的場景中表現也確實還可以。
特斯拉使用的還是有中間模組監督的多任務端到端,所以前端仍然可以顯示出來obj det和occ的結果。但端到端裡的規控不一定會採信上游的結果,近距離漏檢了不一定會起步撞車,近距離誤檢了也不一定會剎車停,所有的結果都輸入到pnc裡綜合判斷。這確實是比較有趣的一點,可以確定的是馬斯克並沒有說謊,這的確是一個端到端系統才會有的表現。
以上是驚艷! ! !特斯拉端到端示範影片分析的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















