

CVPR 2024 | 零樣本6D物體姿態估計框架SAM-6D,向具身智慧更進一步

在許多實際應用中,物件姿態估計扮演著關鍵角色,例如在具身智慧、機器人操作和擴增實境等領域。
在這一領域中,最先受到關注的任務是實例層級6D 姿態估計,其需要關於目標物體的帶標註資料進行模型訓練,使深度模型具有物件特定性,無法遷移應用到新物體上。後來研究熱點逐步轉向類別層級 6D 姿態估計,用於處理未見過的物體,但要求該物體屬於已知感興趣的類別。
而零樣本6D 姿態估計是一種更泛化的任務設置,給定任意物體的CAD 模型,旨在在場景中檢測出該目標物體,並估計其6D 姿態。儘管其具有重要意義,這種零樣本的任務設定在物體檢測和姿態估計方面都面臨著巨大的挑戰。

圖1. 零樣本中6D 物件上估計任務時說明為原則[1] 備受關注,其優異的零樣本分割能力令人矚目。 SAM 透過各種提示,如像素點、包圍框、文字和遮罩等,實現高精度的分割,這也為零樣本 6D 物體姿態估計任務提供了可靠的支撐, 展現了其前景的潛力。 因此,一項新的零樣本 6D 物體姿態估計框架 SAM-6D 被跨維智能、香港中文大學(深圳)、華南理工大學的研究人員提出。這項研究成果已經受到 CVPR 2024 的認可。
 論文連結: https://arxiv.org/pdf/2311.15707.pdf
論文連結: https://arxiv.org/pdf/2311.15707.pdf
#程式碼連結: https://github.com/JiehongLin/SAM-6D
-
SAM-6D 透過兩個步驟來實現零樣本6D 物件姿態估計,包括實例分割和姿態估計。相應地,給定任意目標物體,SAM-6D 利用兩個專用子網絡,即
實例分割模型(ISM)和姿態估計模型(PEM) ,來從RGB-D 場景圖像中實現目標;其中,ISM 將SAM 作為一個優秀的起點,結合精心設計的物體匹配分數來實現對任意物體的實例分割,PEM 透過局部到局部的兩階段點集匹配過程來解決物體姿態問題。 SAM-6D 的總覽如圖 2 所示。
##卷
整體來說,SAM-6D 的技術貢獻可概括如下:
SAM-6D 是一個創新的零樣本6D 姿態估計框架,透過給定任意物體的CAD模型,實現了從RGB-D 影像中對目標物件進行實例分割和姿態估計,並在BOP [2] 的七個核心資料集上表現優異。
SAM-6D 利用分割一切模型的零樣本分割能力,產生了所有可能的候選對象,並設計了一個新穎的物體匹配分數,以識別與目標物體對應的候選對象。
SAM-6D 將姿態估計視為一個局部到局部的點集匹配問題,採用了一個簡單但有效的Background Token 設計,並提出了一個針對任意物體的兩階段點集匹配模型;第一階段實現粗糙的點集匹配以獲得初始物體姿態,第二階段使用新穎的稀疏到稠密點集變換器以進行精細點集匹配,從而對姿態進一步優化。
實例分割模型(ISM)
#SAM-6D 使用實例分割模型(ISM)來偵測並分割出任意物件的遮罩。
給定一個由 RGB 影像表徵的雜亂場景,ISM 利用分割一切模型(SAM)的零樣本遷移能力產生所有可能的候選對象。對於每個候選對象,ISM 為其計算一個物體匹配分數,以估計其與目標物體在語義、外觀和幾何方面的匹配程度。最後透過簡單設定一個匹配閾值,即可辨識出與目標物體所匹配的實例。
物件匹配分數的計算透過三個匹配項的加權求和得到:
語義匹配項 —— 針對目標物體,ISM 渲染了多個視角下的物體模板,並利用DINOv2 [3] 預先訓練的ViT 模型提取候選對象和物體模板的語意特徵,計算它們之間的相關性分數。將前 K 個最高的分數進行平均即可得到語意配對項分數,而最高相關性分數對應的物件範本視為最匹配範本。
外觀匹配項 —— 對於最匹配模板,利用ViT 模型提取圖像塊特徵,併計算其與候選對象的塊特徵之間的相關性,從而獲得外觀匹配項分數,用於區分語義相似但外觀不同的物體。
幾何匹配項 —— 鑑於不同物體的形狀和大小差異等因素,ISM 也設計了幾何匹配項分數。最匹配模板對應的旋轉與候選對象點雲的平均值可以給出粗略的物體姿態,利用該姿態對物體 CAD 模型進行剛性變換並投影可以得到邊界框。計算該邊界框與候選邊界框的交並比(IoU)則可得幾何匹配項分數。
姿態估計模型(PEM)
對於每個與目標物體匹配的候選對象,SAM-6D 利用姿態估計模型(PEM)來預測其相對於物體CAD 模型的6D 姿態。
將分割的候選對象和物體CAD 模型的取樣點集分別表示為 和
和 ,其中N_m 和N_o 表示它們點的數量;同時,將這兩個點集的特徵表示為
,其中N_m 和N_o 表示它們點的數量;同時,將這兩個點集的特徵表示為 和
和 ,C 表示特徵的通道數。 PEM 的目標是得到一個分配矩陣,用來表示從P_m 到P_o 之間的局部到局部對應關係;由於遮蔽的原因,P_o 只部分與匹配P_m,而由於分割不準確性和感測器噪聲,P_m 也只部分與匹配P_o。
,C 表示特徵的通道數。 PEM 的目標是得到一個分配矩陣,用來表示從P_m 到P_o 之間的局部到局部對應關係;由於遮蔽的原因,P_o 只部分與匹配P_m,而由於分割不準確性和感測器噪聲,P_m 也只部分與匹配P_o。
為了解決兩個點集非重疊點的分配問題,ISM 為它們分別配備了Background Token,記為 和
和 ,則可以基於特徵相似性有效地建立局部到局部對應關係。具體來說,首先可以計算注意力矩陣如下:
,則可以基於特徵相似性有效地建立局部到局部對應關係。具體來說,首先可以計算注意力矩陣如下:

接著可得分配矩陣

 和
和  分別表示沿著行和列的 softmax 操作,
分別表示沿著行和列的 softmax 操作, 表示一個常數。
表示一個常數。  中的每一行的值(除了首行),表示點集P_m 中每個點P_m 與背景及P_o 中點的匹配機率,透過定位最大分數的索引,則可以找到與P_m 匹配的點(包括背景)。
中的每一行的值(除了首行),表示點集P_m 中每個點P_m 與背景及P_o 中點的匹配機率,透過定位最大分數的索引,則可以找到與P_m 匹配的點(包括背景)。
一旦計算獲得  ,則可以聚集所有匹配點對 {(P_m,P_o)} 以及它們的匹配分數,最終利用加權 SVD 計算物體姿態。
,則可以聚集所有匹配點對 {(P_m,P_o)} 以及它們的匹配分數,最終利用加權 SVD 計算物體姿態。
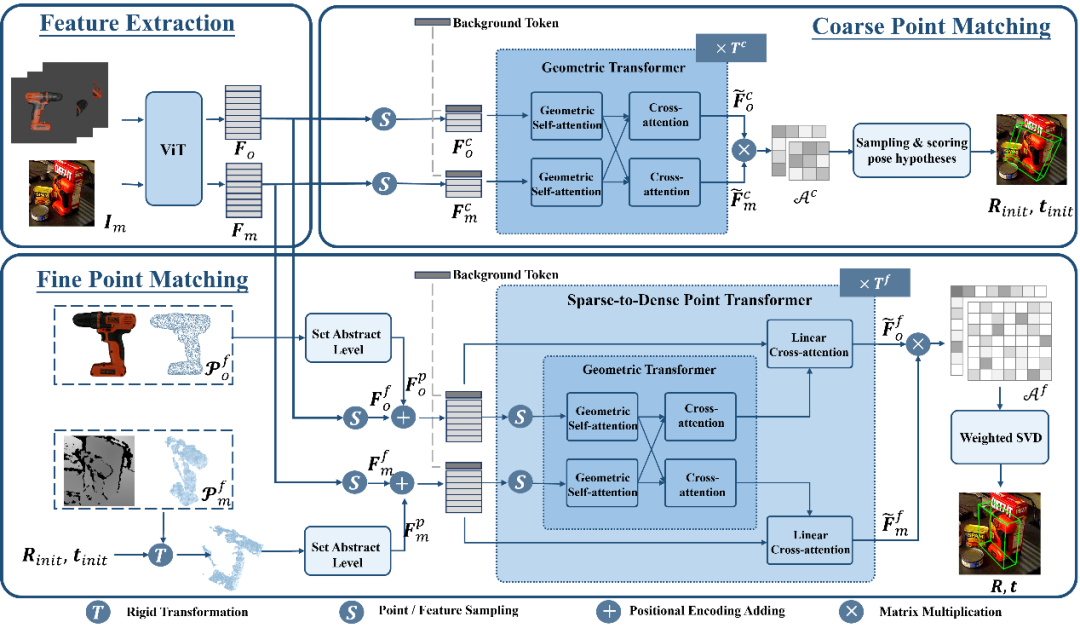
圖上3. SAM-6D 中姿勢下姿勢符號(PEM) 圖3. SAM-6D 中姿態估計模型(PEM) 的估計模型示意圖13.基於Background Token 的策略,PEM 中設計了兩個點集匹配階段,其模型結構如圖3 所示,包含了特徵提取、粗略點集匹配和精細點集匹配
三個模組。粗糙點集匹配模組實現稀疏對應關係,以計算初始物體姿態,隨後利用該姿態來對候選對象的點集進行變換,從而實現位置編碼的學習。
精細點集匹配模組結合候選對象和目標物體的採樣點集的位置編碼,從而注入第一階段的粗糙對應關係,並進一步建立密集對應關係以獲得更精確的物體姿態。為了在這一階段有效地學習密集交互,PEM 引入了一個新穎的稀疏到稠密點集變換器,它實現在密集特徵的稀疏版本上的交互,並利用Linear Transformer [5] 將增強後的稀疏特徵擴散回密集特徵。實驗結果
#
對於SAM-6D 的兩個子模型,實例分割模型(ISM)是基於SAM 建構而成的,無需進行網路的重新訓練和finetune,而姿態估計模型(PEM)則利用MegaPose [4] 提供的大規模ShapeNet-Objects 和Google-Scanned-Objects 合成資料集進行訓練。
為驗證其零樣本能力,SAM-6D 在BOP [2] 的七個核心資料集上進行了測試,包括了LM-O,T-LESS,TUD-L,IC-BIN, ITODD,HB 和YCB-V。表 1 和表 2 分別展示了不同方法在這七個資料集上的實例分割和姿勢估計結果的比較。相較於其他方法,SAM-6D 在兩種方法上的表現均十分優異,充分展現其強大的泛化能力。
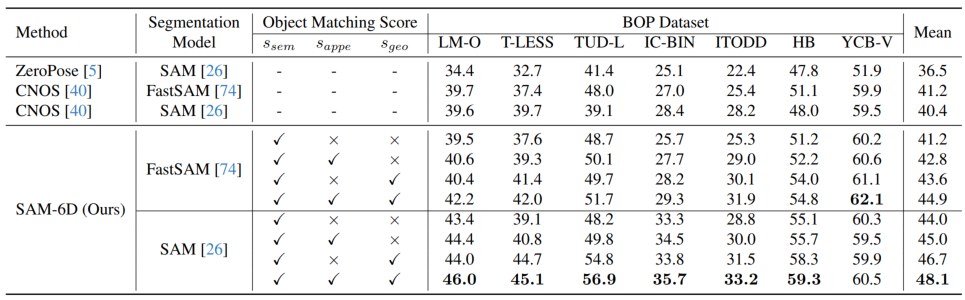
表1.中使用中的範例例
222222222》2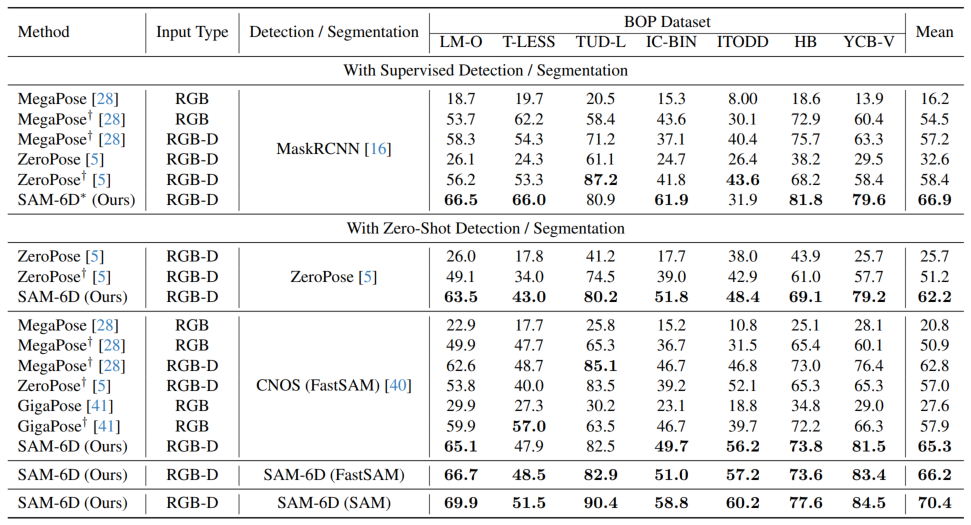
# 我SAM-6D 在BOP 七個資料集上的檢測分割以及6D 姿態估計的可視化結果,其中(a) 和(b) 分別為測試的RGB 影像和深度圖,(c) 為給定的目標物體,而(d) 和(e) 則分別為偵測分割和6D 姿態的可視化結果。

之後中使用中七個 BOP 的核心資料集上的七個視覺結果。 關於SAM-6D 的更多實作細節, 歡迎閱讀原文.
參考文獻:
[1] Alexander Kirillov et. al.,「Segment anything.」
[2] Martin Sundermeyer et. al.,“Bop challenge 2022 on detection, segmentation and pose estimation of specific rigid objects.”
##[3] 馬克斯: Learning robust visual features without supervision.”[4] Yann Labbe et. al.,“Megapose: 6d pose estimation of novel objects via render & compare .”
[5] Angelos Katharopoulos et. al., “Transformers are rnns: Fast autoregressive
#transformers with linear attention.」
以上是CVPR 2024 | 零樣本6D物體姿態估計框架SAM-6D,向具身智慧更進一步的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)



 ControlNet作者又出爆款!一張圖生成繪畫全過程,兩天狂攬1.4k Star
Jul 17, 2024 am 01:56 AM
ControlNet作者又出爆款!一張圖生成繪畫全過程,兩天狂攬1.4k Star
Jul 17, 2024 am 01:56 AM
同樣是圖生視頻,PaintsUndo走出了不一樣的路線。 ControlNet作者LvminZhang又開始整活了!這次瞄準繪畫領域。新項目PaintsUndo剛上線不久,就收穫1.4kstar(還在瘋狂漲)。項目地址:https://github.com/lllyasviel/Paints-UNDO透過這個項目,用戶輸入一張靜態圖像,PaintsUndo就能自動幫你生成整個繪畫的全過程視頻,從線稿到成品都有跡可循。繪製過程,線條變化多端甚是神奇,最終視頻結果和原始圖像非常相似:我們再來看一個完整的繪
 登頂開源AI軟體工程師榜首,UIUC無Agent方案輕鬆解決SWE-bench真實程式設計問題
Jul 17, 2024 pm 10:02 PM
登頂開源AI軟體工程師榜首,UIUC無Agent方案輕鬆解決SWE-bench真實程式設計問題
Jul 17, 2024 pm 10:02 PM
AIxiv專欄是本站發布學術、技術內容的欄位。過去數年,本站AIxiv專欄接收通報了2,000多篇內容,涵蓋全球各大專院校與企業的頂尖實驗室,有效促進了學術交流與傳播。如果您有優秀的工作想要分享,歡迎投稿或聯絡報道。投稿信箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com這篇論文的作者皆來自伊利諾大學香檳分校(UIUC)張令明老師團隊,包括:StevenXia,四年級博士生,研究方向是基於AI大模型的自動代碼修復;鄧茵琳,四年級博士生,研究方
 從RLHF到DPO再到TDPO,大模型對齊演算法已經是「token-level」
Jun 24, 2024 pm 03:04 PM
從RLHF到DPO再到TDPO,大模型對齊演算法已經是「token-level」
Jun 24, 2024 pm 03:04 PM
AIxiv專欄是本站發布學術、技術內容的欄位。過去數年,本站AIxiv專欄接收通報了2,000多篇內容,涵蓋全球各大專院校與企業的頂尖實驗室,有效促進了學術交流與傳播。如果您有優秀的工作想要分享,歡迎投稿或聯絡報道。投稿信箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com在人工智慧領域的發展過程中,對大語言模型(LLM)的控制與指導始終是核心挑戰之一,旨在確保這些模型既強大又安全地服務人類社會。早期的努力集中在透過人類回饋的強化學習方法(RL
 arXiv論文可以發「彈幕」了,史丹佛alphaXiv討論平台上線,LeCun按讚
Aug 01, 2024 pm 05:18 PM
arXiv論文可以發「彈幕」了,史丹佛alphaXiv討論平台上線,LeCun按讚
Aug 01, 2024 pm 05:18 PM
乾杯!當論文討論細緻到詞句,是什麼體驗?最近,史丹佛大學的學生針對arXiv論文創建了一個開放討論論壇——alphaXiv,可以直接在任何arXiv論文之上發布問題和評論。網站連結:https://alphaxiv.org/其實不需要專門訪問這個網站,只需將任何URL中的arXiv更改為alphaXiv就可以直接在alphaXiv論壇上打開相應論文:可以精準定位到論文中的段落、句子:右側討論區,使用者可以發表問題詢問作者論文想法、細節,例如:也可以針對論文內容發表評論,例如:「給出至
 OpenAI超級對齊團隊遺作:兩個大模型博弈一番,輸出更好懂了
Jul 19, 2024 am 01:29 AM
OpenAI超級對齊團隊遺作:兩個大模型博弈一番,輸出更好懂了
Jul 19, 2024 am 01:29 AM
如果AI模型給的答案一點也看不懂,你敢用嗎?隨著機器學習系統在更重要的領域中得到應用,證明為什麼我們可以信任它們的輸出,並明確何時不應信任它們,變得越來越重要。獲得對複雜系統輸出結果信任的一個可行方法是,要求系統對其輸出產生一種解釋,這種解釋對人類或另一個受信任的系統來說是可讀的,即可以完全理解以至於任何可能的錯誤都可以被發現。例如,為了建立對司法系統的信任,我們要求法院提供清晰易讀的書面意見,解釋並支持其決策。對於大型語言模型來說,我們也可以採用類似的方法。不過,在採用這種方法時,確保語言模型生
 黎曼猜想显著突破!陶哲轩强推MIT、牛津新论文,37岁菲尔兹奖得主参与
Aug 05, 2024 pm 03:32 PM
黎曼猜想显著突破!陶哲轩强推MIT、牛津新论文,37岁菲尔兹奖得主参与
Aug 05, 2024 pm 03:32 PM
最近,被稱為千禧年七大難題之一的黎曼猜想迎來了新突破。黎曼猜想是數學中一個非常重要的未解決問題,與素數分佈的精確性質有關(素數是那些只能被1和自身整除的數字,它們在數論中扮演著基礎性的角色)。在當今的數學文獻中,已有超過一千個數學命題以黎曼猜想(或其推廣形式)的成立為前提。也就是說,黎曼猜想及其推廣形式一旦被證明,這一千多個命題將被確立為定理,對數學領域產生深遠的影響;而如果黎曼猜想被證明是錯誤的,那麼這些命題中的一部分也將隨之失去其有效性。新的突破來自MIT數學教授LarryGuth和牛津大學
 LLM用於時序預測真的不行,連推理能力都沒用到
Jul 15, 2024 pm 03:59 PM
LLM用於時序預測真的不行,連推理能力都沒用到
Jul 15, 2024 pm 03:59 PM
語言模型真的能用於時序預測嗎?根據貝特里奇頭條定律(任何以問號結尾的新聞標題,都能夠用「不」來回答),答案應該是否定的。事實似乎也果然如此:強大如斯的LLM並不能很好地處理時序資料。時序,即時間序列,顧名思義,是指一組依照時間發生先後順序排列的資料點序列。在許多領域,時序分析都很關鍵,包括疾病傳播預測、零售分析、醫療和金融。在時序分析領域,近期不少研究者都在研究如何使用大型語言模型(LLM)來分類、預測和偵測時間序列中的異常。這些論文假設擅長處理文本中順序依賴關係的語言模型也能泛化用於時間序
 首個基於Mamba的MLLM來了!模型權重、訓練程式碼等已全部開源
Jul 17, 2024 am 02:46 AM
首個基於Mamba的MLLM來了!模型權重、訓練程式碼等已全部開源
Jul 17, 2024 am 02:46 AM
AIxiv专栏是本站发布学术、技术内容的栏目。过去数年,本站AIxiv专栏接收报道了2000多篇内容,覆盖全球各大高校与企业的顶级实验室,有效促进了学术交流与传播。如果您有优秀的工作想要分享,欢迎投稿或者联系报道。投稿邮箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com。引言近年来,多模态大型语言模型(MLLM)在各个领域的应用取得了显著的成功。然而,作为许多下游任务的基础模型,当前的MLLM由众所周知的Transformer网络构成,这种网
