

用MoE橫掃99個子任務!浙大等提出全新通用機器人策略GeRM

多任務機器人學習在應對多樣化和複雜情景方面具有重要意義。然而,目前的方法受到效能問題和收集訓練資料集的困難的限制。
這篇論文提出了GeRM(通用機器人模型),研究人員利用離線強化學習來優化數據利用策略,從演示和次優數據中學習,從而超越了人類演示的局限性。

作者:宋文軒,趙晗,丁鵬翔,崔燦,呂尚可,範亞凝,王東林
#單位:西湖大學、浙江大學
論文地址:https://arxiv.org/abs/2403.13358
計畫網址: https://songwxuan.github.io/GeRM/
之後採用基於Transformer的視覺-語言-動作模型來處理多模態輸入並輸出動作。
透過引入專家混合結構,GeRM實現了更快的推理速度和更高的整體模型容量,從而解決了強化學習參數量受限的問題,提高了多任務學習中的模型效能,同時控制了計算成本。
透過一系列實驗證明,GeRM在所有任務中均優於其他方法,同時驗證了其在訓練和推理過程中的效率。
此外,研究人員還提供了QUARD-Auto資料集以支援訓練,該資料集的建立遵循文中提出的資料自動化收集的新範式,該方法可以降低收集機器人數據的成本,推動多任務學習社群的進步。
主要貢獻:
#1. 首次提出了四足強化學習的混合專家模型,其在混合品質的資料上進行訓練,從而具備習得最優策略的潛力。
2. 與現有方法相比,GeRM在只激活自身1/2參數的情況下展現出更高的成功率,激活了湧現能力,同時在訓練過程中展現了更優的數據利用策略。
3.提出了一個全自動機器人資料集收集的範式,並收集了一個大規模開源資料集。
方法
GeRM網路結構如圖1所示,包含示範資料和失敗資料的視覺-語言輸入,分別經過編碼器和tokenizer後輸入到8層混合專家結構的decoder中,並產生動作token,最終轉化為離散的機器人動作資料並透過底層策略部署到機器人上,此外我們以強化學習的方式進行訓練。
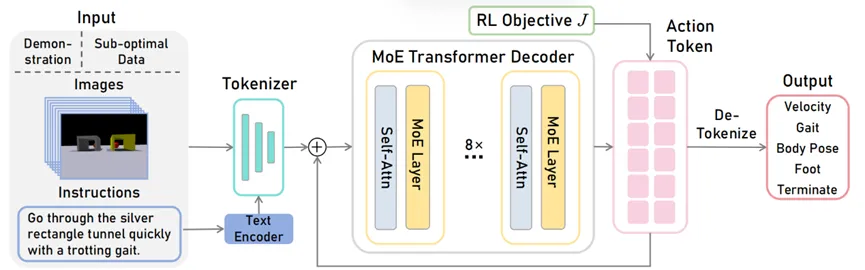
圖1 GeRM網路結構圖
#GeRM Decoder是一個包含Transformer Decoder架構模型,其中前饋網路(FFN)從一組8 個不同的專家網路中選擇。
在每一層,對於每一個標記,門控網路選擇兩個專家來處理token,並將它們的輸出加權組合。
不同的專家擅長不同的任務/不同的動作維度,以解決不同場景中的問題,從而學習跨多個任務的通用模型。此架構擴大了網路參數量,同時保持運算成本基本不變。
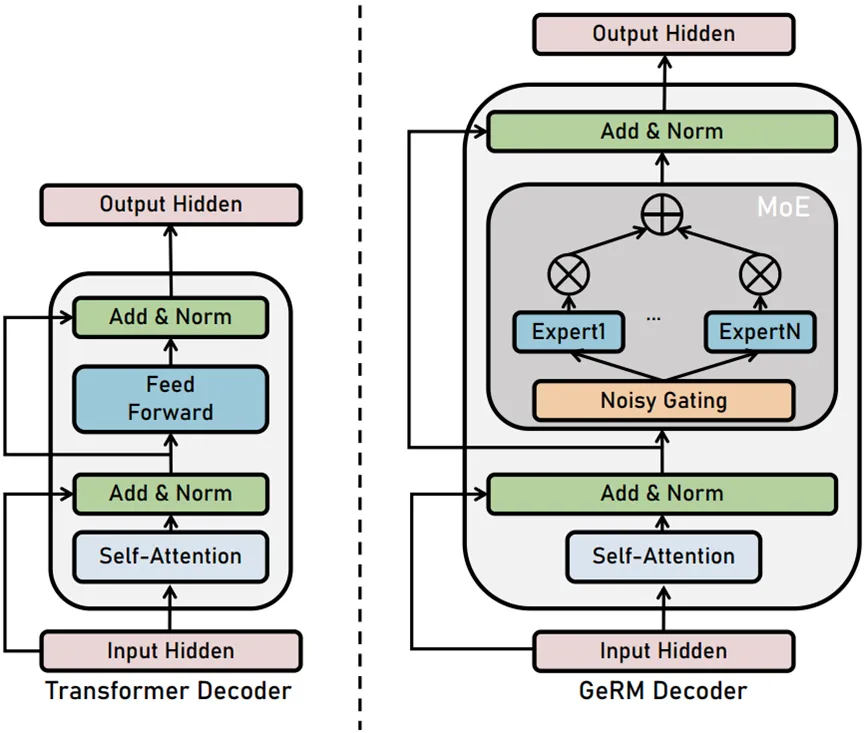
圖2 Decoder結構圖
我們提出了一個自動的範式來收集機器人多模態數據。透過這種方式,我們建立了一個大規模的機器人資料集QUARD-Auto,其中包含演示和次優資料的組合。它包括5個任務和99個子任務,總共有257k條軌跡。我們將進行開源以促進機器人社群發展。

表1 資料集介紹
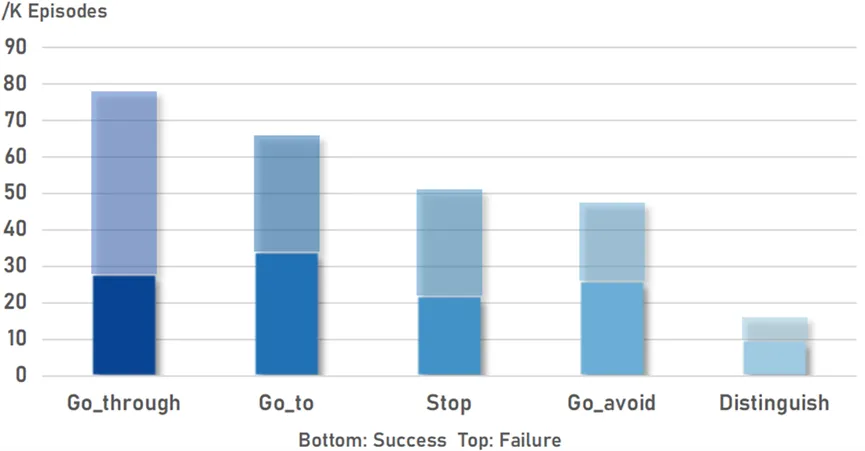
圖3 數據量統計
實驗
我們進行了一系列全面且可靠的實驗,涵蓋了所有 99 個子任務,每個子任務進行了 400 條軌蹟的精心測試。
如表1所示,GeRM在所有任務中具有最高的成功率。與 RT-1 和其他GeRM 的變體相比,它有效地從混合質量的數據中學習,優於其他方法,並在多任務中展現出優越的能力。同時,MoE 模組透過在推理時啟動部分參數來平衡計算成本和效能。
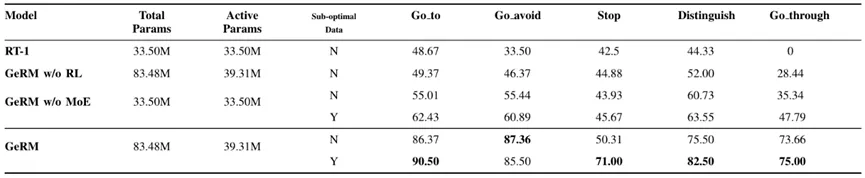
表2 多任務對比實驗
#GeRM表現出令人稱讚的訓練效率。與其他方法相比,GeRM 僅需極少的batch就獲得了極低的Loss和較高的成功率,凸顯了GeRM優化資料利用策略的能力。
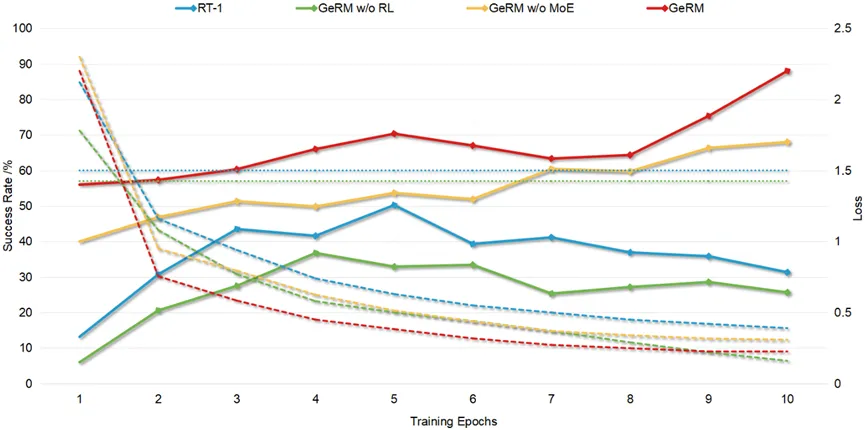
圖4 成功率/Loss變化曲線
GeRM 在動態自適應路徑規劃上展現出了湧現能力。如影片所示,四足機器人在初始位置視野受限,難以確定移動方向。為了避開障礙物,它隨機選擇向左轉。
隨後,在遇到錯誤的視覺輸入後,機器人執行了大幅度的重新定向,以與原始視野之外的正確目標對齊。然後,它繼續向目的地駛去,最終完成任務。
值得注意的是,這樣的軌跡不屬於我們的訓練資料集分佈之內。這表明 GeRM 在場景背景下的動態自適應路徑規劃方面具有湧現能力,即它能夠根據視覺感知進行決策、規劃未來路徑,並根據需要改變下一步。
圖5 湧現能力
以上是用MoE橫掃99個子任務!浙大等提出全新通用機器人策略GeRM的詳細內容。更多資訊請關注PHP中文網其他相關文章!

熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

SublimeText3漢化版
中文版,非常好用

禪工作室 13.0.1
強大的PHP整合開發環境

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)
熱門話題



 git怎麼刪除倉庫
Apr 17, 2025 pm 04:03 PM
git怎麼刪除倉庫
Apr 17, 2025 pm 04:03 PM
要刪除 Git 倉庫,請執行以下步驟:確認要刪除的倉庫。本地刪除倉庫:使用 rm -rf 命令刪除其文件夾。遠程刪除倉庫:導航到倉庫設置,找到“刪除倉庫”選項,確認操作。
 git服務器怎麼連接公網
Apr 17, 2025 pm 02:27 PM
git服務器怎麼連接公網
Apr 17, 2025 pm 02:27 PM
將 Git 服務器連接到公網包括五個步驟:1. 設置公共 IP 地址;2. 打開防火牆端口(22、9418、80/443);3. 配置 SSH 訪問(生成密鑰對、創建用戶);4. 配置 HTTP/HTTPS 訪問(安裝服務端、配置權限);5. 測試連接(使用 SSH 客戶端或 Git 命令)。
 git賬戶怎麼添加公鑰
Apr 17, 2025 pm 02:42 PM
git賬戶怎麼添加公鑰
Apr 17, 2025 pm 02:42 PM
如何將公鑰添加到 Git 賬戶?步驟:生成 SSH 密鑰對。複製公鑰。在 GitLab 或 GitHub 中添加公鑰。測試 SSH 連接。
 git代碼衝突怎麼處理
Apr 17, 2025 pm 02:51 PM
git代碼衝突怎麼處理
Apr 17, 2025 pm 02:51 PM
代碼衝突是指當多個開發者修改同一段代碼導致 Git 合併時無法自動選擇更改而出現的衝突。解決步驟包括:打開有衝突的文件,找出衝突代碼。手動合併代碼,將要保留的更改複製到衝突標記內。刪除衝突標記。保存並提交更改。
 git怎么生成ssh密鑰
Apr 17, 2025 pm 01:36 PM
git怎么生成ssh密鑰
Apr 17, 2025 pm 01:36 PM
為了安全連接遠程 Git 服務器,需要生成包含公鑰和私鑰的 SSH 密鑰。生成 SSH 密鑰的步驟如下:打開終端,輸入命令 ssh-keygen -t rsa -b 4096。選擇密鑰保存位置。輸入密碼短語以保護私鑰。將公鑰複製到遠程服務器上。將私鑰妥善保存,因為它是訪問帳戶的憑據。
 git怎麼檢測ssh
Apr 17, 2025 pm 02:33 PM
git怎麼檢測ssh
Apr 17, 2025 pm 02:33 PM
要通過 Git 檢測 SSH,需要執行以下步驟:生成 SSH 密鑰對。將公鑰添加到 Git 服務器。配置 Git 使用 SSH。測試 SSH 連接。根據實際情況解決可能遇到的問題。
 git怎麼分開commit
Apr 17, 2025 pm 02:36 PM
git怎麼分開commit
Apr 17, 2025 pm 02:36 PM
使用 git 可以分開提交代碼,提供精細的變更追踪和獨立的工作能力。步驟如下: 1. 添加已更改的文件; 2. 提交特定更改; 3. 重複上述步驟; 4. 推送提交到遠程倉庫。
 git服務器怎麼搭建
Apr 17, 2025 pm 12:57 PM
git服務器怎麼搭建
Apr 17, 2025 pm 12:57 PM
搭建 Git 服務器包括:在服務器上安裝 Git。創建運行服務器的用戶和組。創建 Git 存儲庫目錄。初始化裸存儲庫。配置訪問控制設置。啟動 SSH 服務。為用戶授予訪問權限。測試連接。
