
「基於3D空間中的取樣進行計算密集型SLAM任務所需的即時能力」的隱含表達式需要基於NeRF-based SLAM方法。 3DGS以其快速的渲染速度和優越的視覺品質而引人注目。作為一種明確且可以解釋的表達法,3DGS使得場景編輯變得簡單,有利於眾多下游任務的執行。
現有的基於輻射場的SLAM系統,主要在光照良好的小規模室內環境中進行測試,並使用順序RGB-D或RGB輸入獲得令人滿意的結果。當這些方法擴展到具有挑戰性的大規模不受控制的室外場景時將會遇到困難,例如具有挑戰性的光照條件、雜亂的背景和高度動態的自身運動。
使用Gaussian-LIC 透過融合來自多個感測器的數據,包括3D雷射雷達、IMU和相機(稱為ALIC),在不受控制的室外場景中
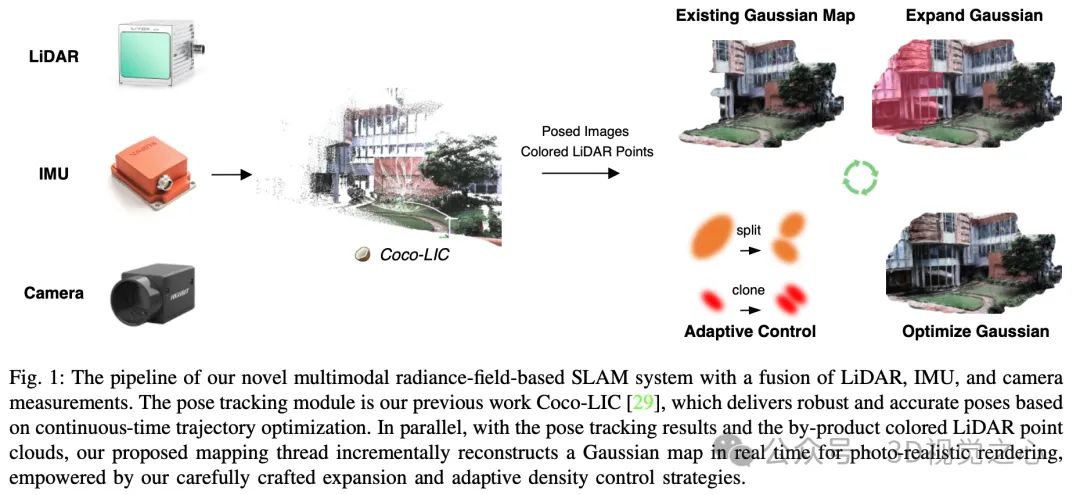
如圖1所示是LIC-SLAM系統流程。
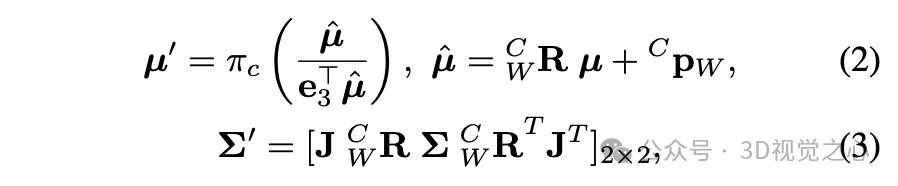
#將場景表示為各向異性的3D高斯集合,每個高斯的變異數:

將3D高斯投影到影像平面上,獲得2D高斯分佈:
投影獲得的2D高斯透過不透明度加權方程式影響像素:

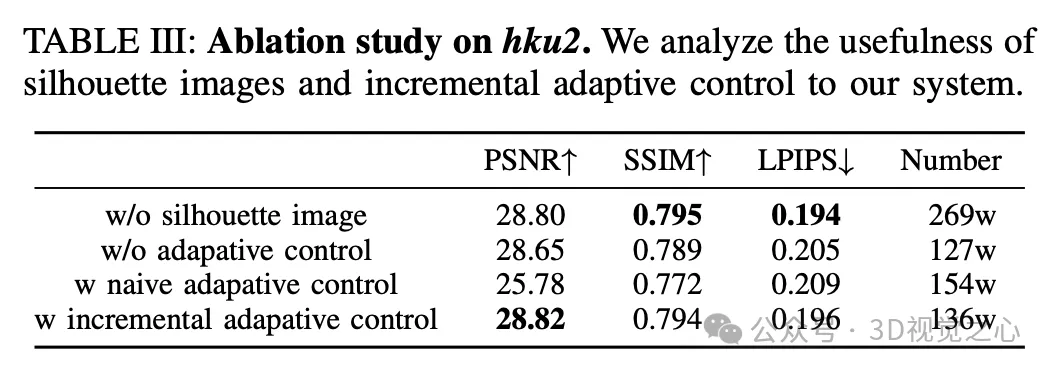
渲染輪廓圖像以確定像素是否包含了足夠的來自高斯地圖的資訊:

里程計採用了先前的工作Coco-LIC作為追蹤前端,一個連續時間緊密耦合的雷射雷達慣性攝影機測距系統。透過整合三種互補的感測器,Gaussian-LIC實現了強大、即時和高精度的姿態估計,從而促進了整個SLAM系統的運作。
每當最新的 (本文為0.1秒)內的雷射雷達慣性攝影機資料被累積時,會基於因子圖有效地優化該時間間隔內的軌跡:
在時間間隔內我們僅利用最新的影像進行優化。
Gaussian-LIC維護一個以0.1公尺解析度儲存在體素中的全域雷射雷達地圖。在優化當前時間間隔內的軌跡後,為了提高效率,僅將該時間段內四分之一的激光雷達點轉換為世界坐標並附加到體素中,以確保每個體素中的激光雷達點之間的距離應大於0.05米,以減少冗餘。對於成功附加的光達點,將它們投影到最新的圖像上,並透過查詢像素值為其著色。隨後,它們與估計的相機姿態的最新圖像一起發送到映射線程,被視為一幀。
隨著持續輸入:估計的相機姿態、無畸變影像、著色的雷射雷達點,建圖模組逐步建構和優化高斯地圖,主要分4步:



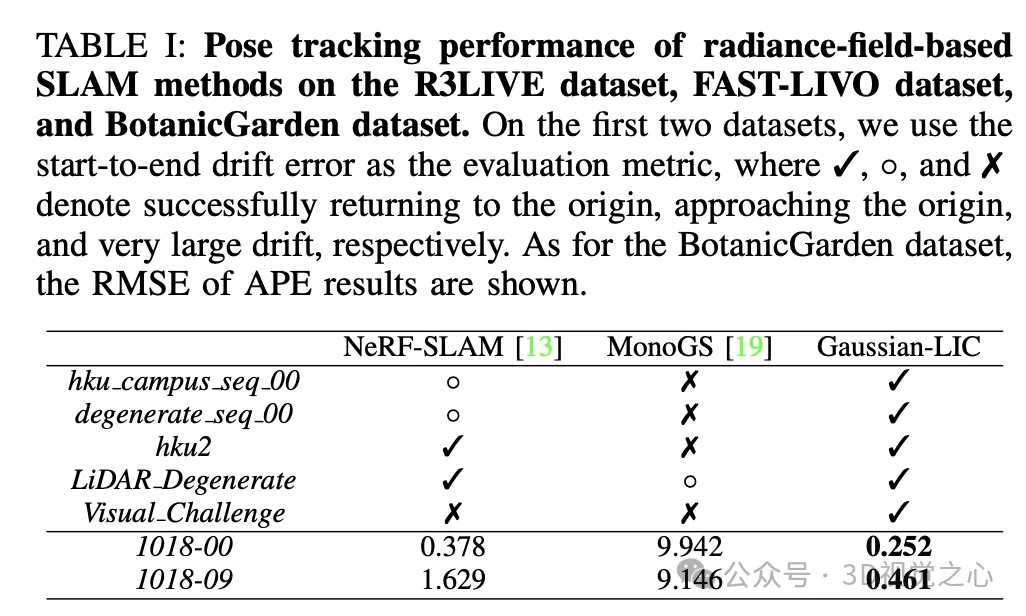
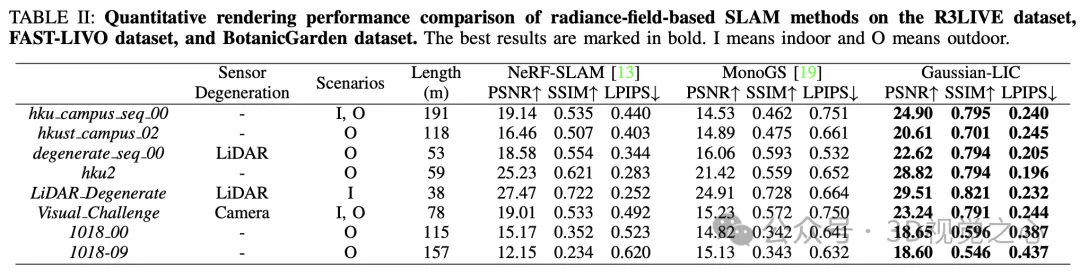
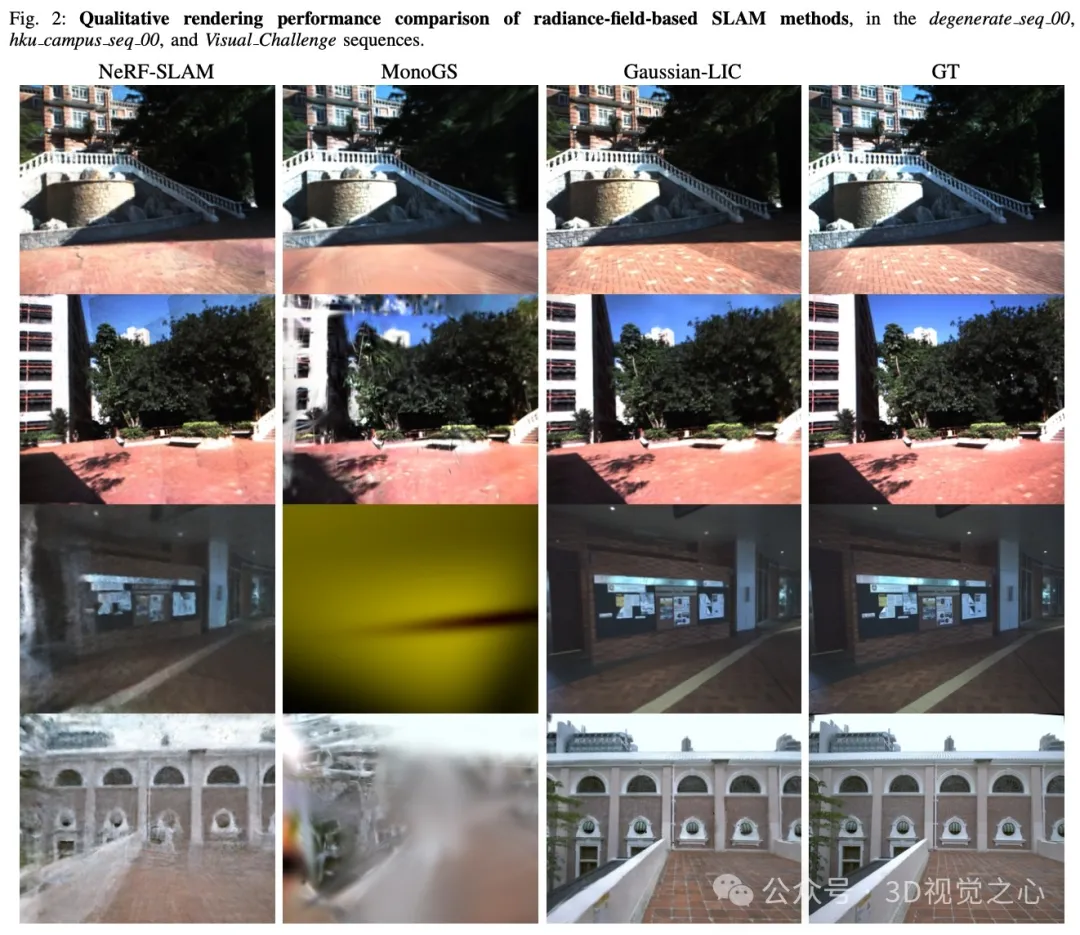
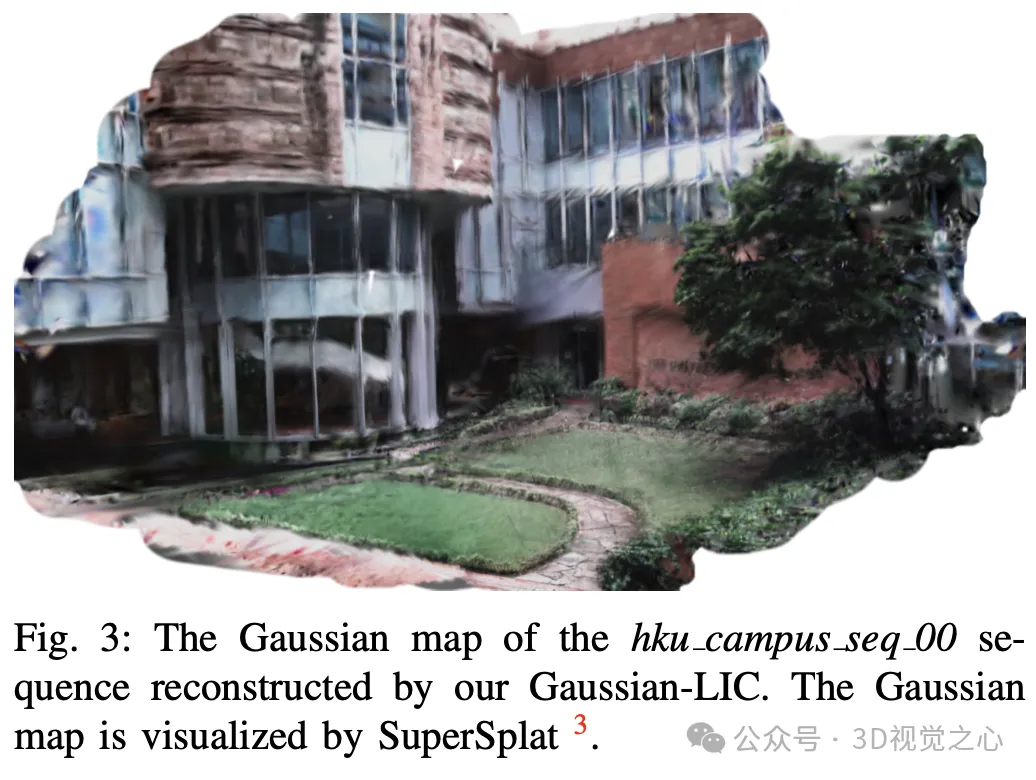
#Gaussian-LIC 是一種新穎的LiDAR-慣性-相機輻射場SLAM系統,實現了高度準確的追蹤、具有3D高斯噴濺的逼真線上重建的雙重功能。由高效的LiDAR-慣性-相機里程計產生的世界座標中的著色LiDAR點被用作良好的先驗,以輔助高斯地圖的增量建立,在室內和室外場景中具有顯著更好的泛化能力。
以上是Gaussian-LIC:首個多感測器融合3DGS-SLAM系統(浙大&TUM)的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















