

适应多形态多任务,最强开源机器人学习系统「八爪鱼」诞生

在机器人学习方面,一种常用方法是收集针对特定机器人和任务的数据集,然后用其来训练策略。但是,如果使用这种方法来从头开始学习,每一个任务都需要收集足够数据,并且所得策略的泛化能力通常也不佳。
“原理上讲,从其他机器人和任务收集的经验能提供可能的解决方案,能让模型看到多种多样的机器人控制问题,而这些问题也许能提升机器人在下游任务上的泛化能力和性能。但是,即便现在已经出现了能处理多种自然语言和计算机视觉任务的通用模型,构建『通用机器人模型』依然困难重重。”
要让机器人训练一个统一的控制策略非常困难,其中包括涉及诸多难点,包括操作不同的机器人机体、传感器配置、动作空间、任务规范、环境和计算预算。
为了实现这一目标,已经出现了一些「机器人基础模型」相关研究成果;它们的做法是直接将机器人观察映射成动作,然后通过零样本本方案泛化至新领域或新机器人。这些模型通常被称为「通才机器人策略(generalist robot policy)」,简称 GRP,这强调了机器人跨多种任务、环境和机器人系统执行低阶视觉运动控制的能力。
GNM(General Navigation Model,通用导航模型)适用于多种不同的机器人导航场景,RoboCat 可针对任务目标操作不同的机器人机体,RT-X 能通过语言操作五种不同的机器人机体。尽管这些模型确实是重要进展,但它们也存在多方面的局限:它们的输入观察通常是预定义的且通常很有限(比如单相机输入视频流);它们难以有效微调至新领域;这些模型中最大型的版本都没有提供人们使用(这一点很重要)。
近日,加州大学伯克利分校、斯坦福大学、卡内基梅隆大学和谷歌DeepMind的18位研究者组成的Octo Model Team发布了他们的开创性研究成果:Octo模型。该项目有效地克服了上述局限。
- 论文标题:Octo: An Open-Source Generalist Robot Policy
- 论文地址:https://arxiv.org/pdf/2405.12213
- 开源项目:https://octo-models.github.io/
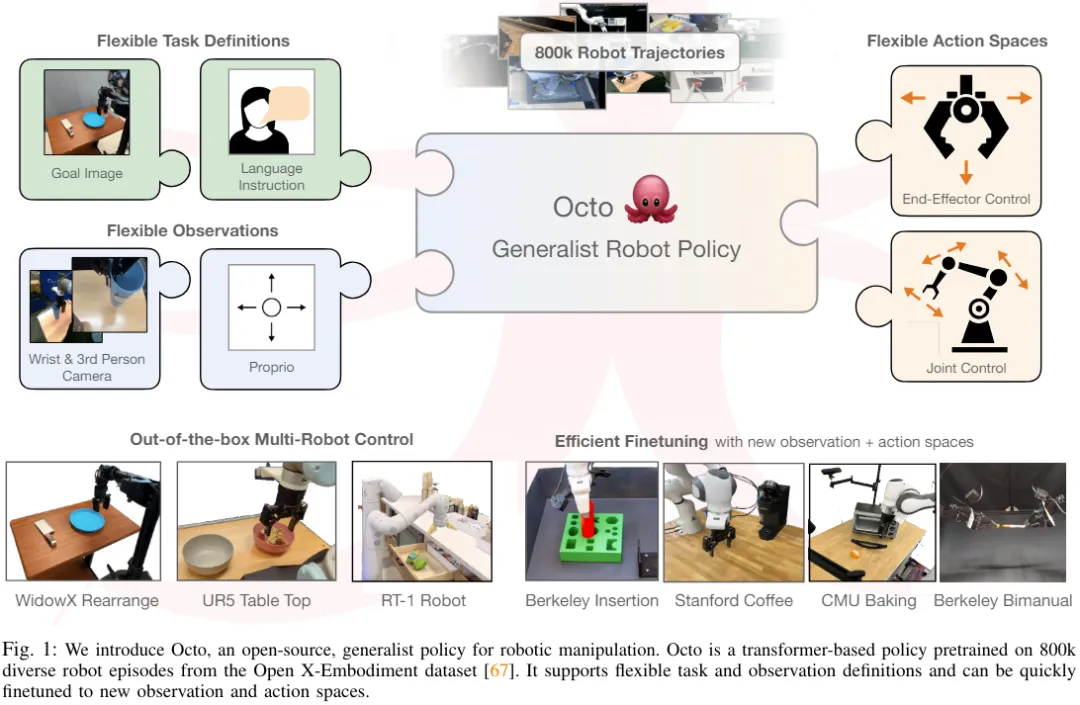
他们设计了一个系统,能让 GRP 更轻松地应对下游机器人应用的接口多样化问题。
该模型的核心是 Transformer 架构,其可将任意输入 token(根据观察和任务创建)映射成输出 token(然后编码成动作),而且该架构可使用多样化的机器人和任务数据集进行训练。该策略无需额外训练就能接受不同的相机配置,也能控制不同的机器人,还能通过语言命令或目标图像进行引导 ——— 所有这些只需通过改变输入模型的 token 即可实现。
最重要的是,该模型还能适应传感器输入、操作空间或机器人形态不同的新机器人配置,所需的只是采用适当的适配器(adapter)并使用一个小的目标领域数据集和少量计算预算进行微调。
不仅如此,Octo 还已经在迄今为止最大的机器人操控数据集上完成了预训练 —— 该数据集包含来自 Open X-Embodiment 数据集的 80 万个机器人演示。Octo 不仅是首个可有效微调至新观察和动作空间的 GRP,也是首个完全开源(训练工作流程、模型检查点和数据)的通才机器人操控策略。该团队也在论文中强调了其组合 Octo 各组件的独特创新性。
Octo 模型
下面我们来看看 Octo 这个开源的通才机器人策略是如何构建的。总体而言,Octo 的设计目标是让其成为一个灵活且广泛适用的通才机器人策略,可被大量不同的下游机器人应用和研究项目使用。
架构
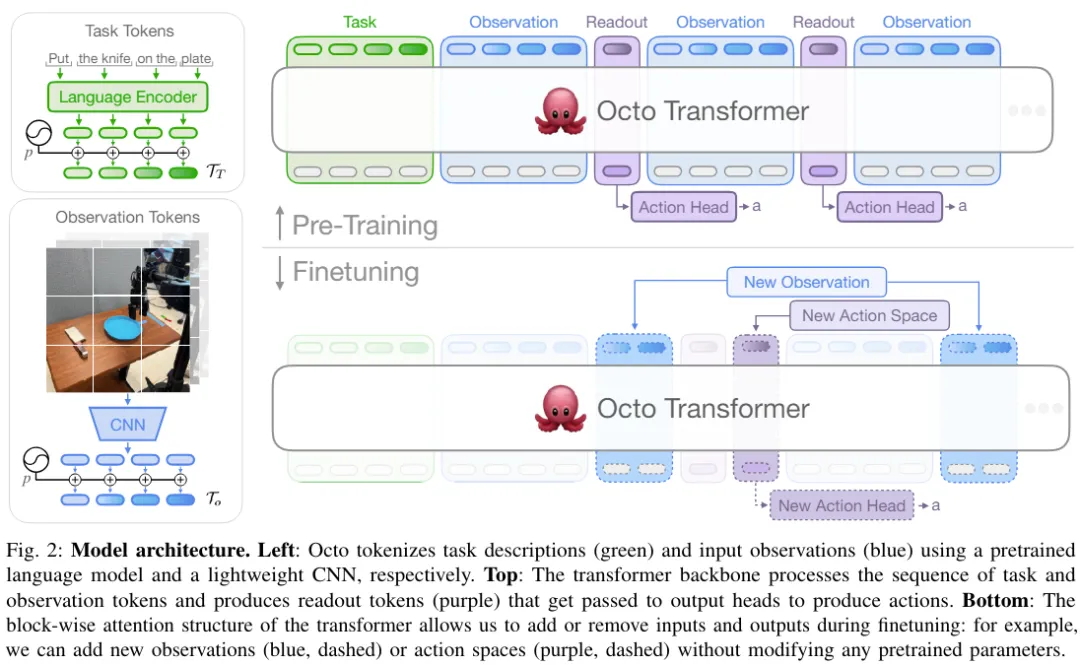
Octo 的核心是基于 Transformer 的策略 π。其包含三个关键部分:输入 token 化器、Transformer 骨干网络和读出头。
如图 2 所示,其中输入 token 化器的作用是将语言指令、目标和观察序列转换成 token,Transformer 骨干会把这些 token 处理成嵌入,读出头则是得出所需的输出,即动作。
任务和观察 token 化器
为了将任务定义(比如语言指令和目标图像)与观察(比如相机视频流)转换成常用的已 token 化的格式,该团队针对不同模态使用了不同的 token 化器:
对于语言输入,先 token 化,然后通过一个预训练的 Transformer 将其处理成一个语言嵌入 token 序列。具体而言,他们使用的模型是 t5-base (111M)。
对于图像观察和目标,则是通过一个较浅的卷积堆栈来处理,然后再拆分成平展后图块构成的序列。
最后,通过向任务和观察 token 添加可学习的位置嵌入并按一定顺序排列它们来构建 Transformer 的输入序列。
Transformer 骨干和读出头
将输入处理成一种统一化的 token 序列之后,就能交给 Transformer 处理了。这与之前的研究工作类似:基于观察和动作系列来训练基于 Transformer 的策略。
Octo 的注意力模式是逐块掩码式:观察 token 只能按照因果关系关注来自同一或之前时间步骤的 token 以及任务 token。对应于不存在观察的 token 会被完全掩蔽掉(比如没有语言指令的数据集)。这种模块化设计很方便,可在微调阶段添加或移除观察或任务。
除了这些输入 token 模块,该团队还插入了已学习完成的读出 token。读出 token 会关注其之前的观察和任务 token,但不会被任何观察或任务 token 关注。因此,读出 token 只能读取和处理内部嵌入,而无法影响内部嵌入。读出 token 的作用类似于 BERT 中的 [CLS] token,充当截至目前的观察序列的紧凑向量嵌入。针对读出 token 的嵌入,会使用一个轻量的实现扩散过程的「动作头」。这个动作头会预测多个连续动作构成的一个「块(chunk)」。
这样的设计可让用户在下游微调时向模型灵活地添加新的任务和观察输入或动作输出头。当在下游添加新的任务、观察或损失函数时,可以在整体上保留 Transformer 的预训练权重,仅添加新的位置嵌入、一个新的轻量编码器、或由于规范变化而必需的新头的参数。这不同于之前的架构 —— 对于之前的架构,如果添加或移除图像输入或改变任务规范,就需要重新初始化或重新训练预训练模型的大量组件。
要让 Octo 成为真正的「通才」模型,这种灵活性至关重要:由于我们不可能在预训练阶段覆盖所有可能的机器人传感器和动作配置,因此,如果能在微调阶段调整 Octo 的输入和输出,便能让其成为机器人社区的一种多功能工具。另外,之前使用标准 Transformer 骨干或融合使用视觉编码器与 MLP 输出头的模型设计固定了模型输入的类型和顺序。相较之下,切换 Octo 的观察或任务并不需要对大部分模型进行重新初始化。
训练数据
该团队从 Open X-Embodiment 中取用了包含 25 个数据集的混合数据集。图 3 给出了数据集的组成。
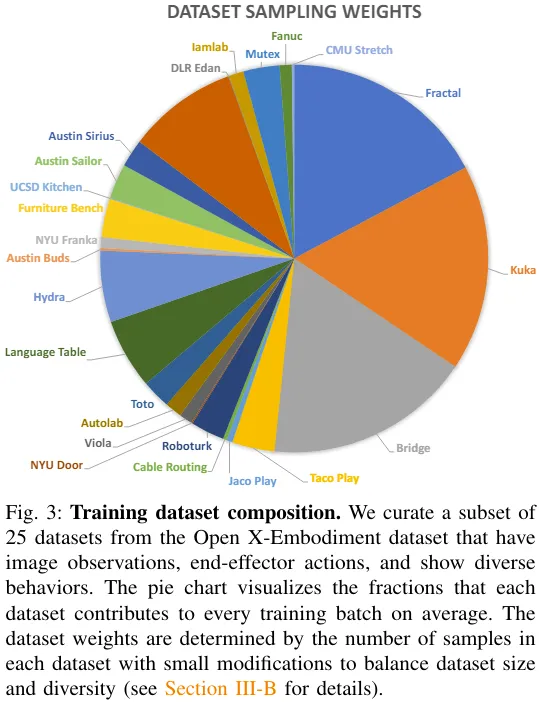
有关训练目标和训练硬件配置等更多细节请参阅原论文。
模型检查点和代码
重点来了!该团队不仅发了 Octo 的论文,还完全开源了所有资源,其中包括:
- 预训练完成的 Octo 检查点,包括 2700 万参数的 Octo-Small 和 9300 万参数的 Octo-Base。
- 用于 Octo 模型的微调脚本,基于 JAX。
- 用于在 Open X-Embodiment 数据集上预训练 Octo 的模型预训练工作流程,基于 JAX。用于 Open X-Embodiment 数据的数据加载器,兼容 JAX 和 PyTorch。
实验
该团队也通过实验对 Octo 进行了实证分析,在多个维度上评估了其作为机器人基础模型的性能:
- 能否直接使用 Octo 控制多台机器人机体并解决语言和目标任务?
- Octo 权重可否作为优质的初始化基础,支持面向新任务和机器人的数据高效型微调,以及它是否优于从头开始训练的方法和常用的预训练表征?
- 在构建通才机器人策略方面,Octo 中的哪种设计决策最重要?
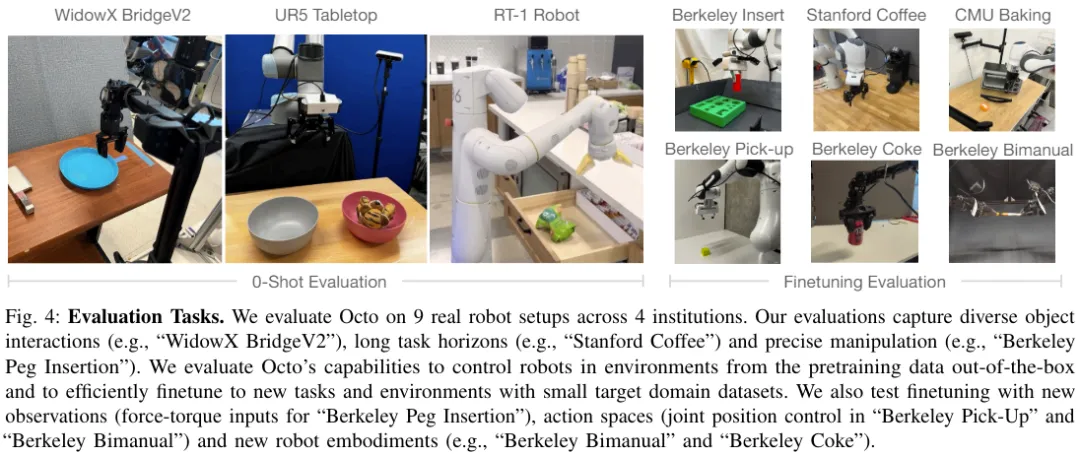
图 4 展示了评估 Octo 的 9 种任务。
直接使用 Octo 控制多台机器人
该团队比较了 Octo、RT-1-X、RT-2-X 的零样本操控能力,结果见图 5。
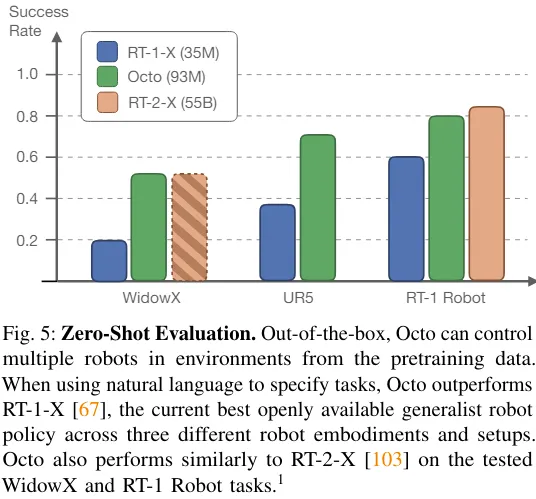
可以看到,Octo 的成功率比 RT-1-X(3500 万参数)高 29%。而在 WidowX 和 RT-1 Robot 评估上,Octo 与 550 亿参数的 RT-2-X 性能相当。
此外,RT-1-X 和 RT-2-X 仅支持语言指令,而 Octo 还支持以目标图像为条件。该团队还发现,在 WidowX 任务上,如果使用目标图像为条件,成功率比使用语言为条件高 25%。这可能是因为目标图像能提供更多有关任务完成的信息。
Octo 能高效地使用数据来适应新领域
表 1 给出了数据高效型微调的实验结果。

可以看到,相比于从头开始训练或使用预训练的 VC-1 权重进行预训练,微调 Octo 得到的结果更好。在 6 种评估设置上,Octo 相较于第二名基准的平均优势为 52%!
并且不得不提的是:针对所有这些评估任务,微调 Octo 时使用的配方和超参数全都一样,由此可见该团队找到了一个非常好的默认配置。
通才机器人策略训练的设计决策
上面的结果表明 Octo 确实能作为零样本多机器人控制器,也能作为策略微调的初始化基础。接下来,该团队分析了不同设计决策对 Octo 策略性能的影响。具体而言,他们关注的重点是以下方面:模型架构、训练数据、训练目标、模型规模。为此,他们进行了消融研究。
表 2 给出了在模型架构、训练数据和训练目标的消融研究结果。
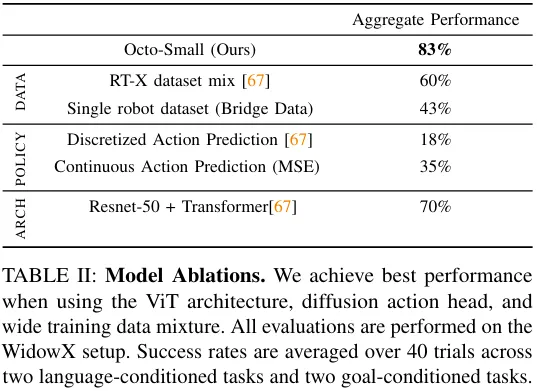
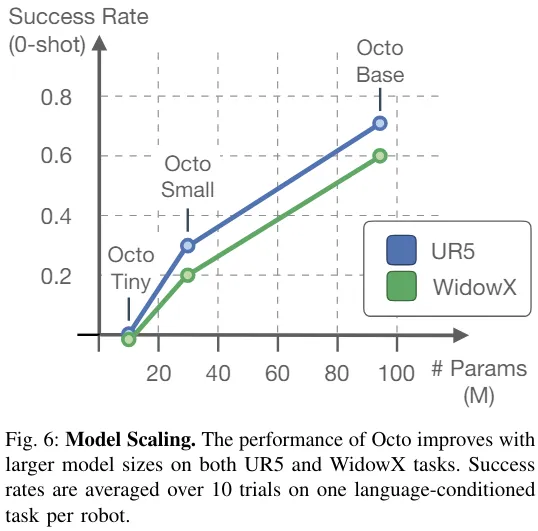
图 6 则展现了模型规模对零样本成功率的影响,可以看出来更大的模型有更好的视觉场景感知能力。
整体而言,Octo 各组件的有效性得到了证明。
以上是适应多形态多任务,最强开源机器人学习系统「八爪鱼」诞生的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 开源!超越ZoeDepth! DepthFM:快速且精确的单目深度估计!
Apr 03, 2024 pm 12:04 PM
开源!超越ZoeDepth! DepthFM:快速且精确的单目深度估计!
Apr 03, 2024 pm 12:04 PM
0.这篇文章干了啥?提出了DepthFM:一个多功能且快速的最先进的生成式单目深度估计模型。除了传统的深度估计任务外,DepthFM还展示了在深度修复等下游任务中的最先进能力。DepthFM效率高,可以在少数推理步骤内合成深度图。下面一起来阅读一下这项工作~1.论文信息标题:DepthFM:FastMonocularDepthEstimationwithFlowMatching作者:MingGui,JohannesS.Fischer,UlrichPrestel,PingchuanMa,Dmytr
 全球最强开源 MoE 模型来了,中文能力比肩 GPT-4,价格仅为 GPT-4-Turbo 的近百分之一
May 07, 2024 pm 04:13 PM
全球最强开源 MoE 模型来了,中文能力比肩 GPT-4,价格仅为 GPT-4-Turbo 的近百分之一
May 07, 2024 pm 04:13 PM
想象一下,一个人工智能模型,不仅拥有超越传统计算的能力,还能以更低的成本实现更高效的性能。这不是科幻,DeepSeek-V2[1],全球最强开源MoE模型来了。DeepSeek-V2是一个强大的专家混合(MoE)语言模型,具有训练经济、推理高效的特点。它由236B个参数组成,其中21B个参数用于激活每个标记。与DeepSeek67B相比,DeepSeek-V2性能更强,同时节省了42.5%的训练成本,减少了93.3%的KV缓存,最大生成吞吐量提高到5.76倍。DeepSeek是一家探索通用人工智
 AI颠覆数学研究!菲尔兹奖得主、华裔数学家领衔11篇顶刊论文|陶哲轩转赞
Apr 09, 2024 am 11:52 AM
AI颠覆数学研究!菲尔兹奖得主、华裔数学家领衔11篇顶刊论文|陶哲轩转赞
Apr 09, 2024 am 11:52 AM
AI,的确正在改变数学。最近,一直十分关注这个议题的陶哲轩,转发了最近一期的《美国数学学会通报》(BulletinoftheAmericanMathematicalSociety)。围绕「机器会改变数学吗?」这个话题,众多数学家发表了自己的观点,全程火花四射,内容硬核,精彩纷呈。作者阵容强大,包括菲尔兹奖得主AkshayVenkatesh、华裔数学家郑乐隽、纽大计算机科学家ErnestDavis等多位业界知名学者。AI的世界已经发生了天翻地覆的变化,要知道,其中很多文章是在一年前提交的,而在这一
 你好,电动Atlas!波士顿动力机器人复活,180度诡异动作吓坏马斯克
Apr 18, 2024 pm 07:58 PM
你好,电动Atlas!波士顿动力机器人复活,180度诡异动作吓坏马斯克
Apr 18, 2024 pm 07:58 PM
波士顿动力Atlas,正式进入电动机器人时代!昨天,液压Atlas刚刚「含泪」退出历史舞台,今天波士顿动力就宣布:电动Atlas上岗。看来,在商用人形机器人领域,波士顿动力是下定决心要和特斯拉硬刚一把了。新视频放出后,短短十几小时内,就已经有一百多万观看。旧人离去,新角色登场,这是历史的必然。毫无疑问,今年是人形机器人的爆发年。网友锐评:机器人的进步,让今年看起来像人类的开幕式动作、自由度远超人类,但这真不是恐怖片?视频一开始,Atlas平静地躺在地上,看起来应该是仰面朝天。接下来,让人惊掉下巴
 替代MLP的KAN,被开源项目扩展到卷积了
Jun 01, 2024 pm 10:03 PM
替代MLP的KAN,被开源项目扩展到卷积了
Jun 01, 2024 pm 10:03 PM
本月初,来自MIT等机构的研究者提出了一种非常有潜力的MLP替代方法——KAN。KAN在准确性和可解释性方面表现优于MLP。而且它能以非常少的参数量胜过以更大参数量运行的MLP。比如,作者表示,他们用KAN以更小的网络和更高的自动化程度重现了DeepMind的结果。具体来说,DeepMind的MLP有大约300,000个参数,而KAN只有约200个参数。KAN与MLP一样具有强大的数学基础,MLP基于通用逼近定理,而KAN基于Kolmogorov-Arnold表示定理。如下图所示,KAN在边上具
 特斯拉机器人进厂打工,马斯克:手的自由度今年将达到22个!
May 06, 2024 pm 04:13 PM
特斯拉机器人进厂打工,马斯克:手的自由度今年将达到22个!
May 06, 2024 pm 04:13 PM
特斯拉机器人Optimus最新视频出炉,已经可以在厂子里打工了。正常速度下,它分拣电池(特斯拉的4680电池)是这样的:官方还放出了20倍速下的样子——在小小的“工位”上,拣啊拣啊拣:这次放出的视频亮点之一在于Optimus在厂子里完成这项工作,是完全自主的,全程没有人为的干预。并且在Optimus的视角之下,它还可以把放歪了的电池重新捡起来放置,主打一个自动纠错:对于Optimus的手,英伟达科学家JimFan给出了高度的评价:Optimus的手是全球五指机器人里最灵巧的之一。它的手不仅有触觉
 牛津大学最新!Mickey:3D中的2D图像匹配SOTA!(CVPR\'24)
Apr 23, 2024 pm 01:20 PM
牛津大学最新!Mickey:3D中的2D图像匹配SOTA!(CVPR\'24)
Apr 23, 2024 pm 01:20 PM
写在前面项目链接:https://nianticlabs.github.io/mickey/给定两张图片,可以通过建立图片之间的对应关系来估计它们之间的相机姿态。通常,这些对应关系是二维到二维的,而我们估计的姿态在尺度上是不确定的。一些应用,例如随时随地实现即时增强现实,需要尺度度量的姿态估计,因此它们依赖于外部的深度估计器来恢复尺度。本文提出了MicKey,这是一个关键点匹配流程,能够够预测三维相机空间中的度量对应关系。通过学习跨图像的三维坐标匹配,我们能够在没有深度测试的情况下推断出度量相对
 快手版Sora「可灵」开放测试:生成超120s视频,更懂物理,复杂运动也能精准建模
Jun 11, 2024 am 09:51 AM
快手版Sora「可灵」开放测试:生成超120s视频,更懂物理,复杂运动也能精准建模
Jun 11, 2024 am 09:51 AM
什么?疯狂动物城被国产AI搬进现实了?与视频一同曝光的,是一款名为「可灵」全新国产视频生成大模型。Sora利用了相似的技术路线,结合多项自研技术创新,生产的视频不仅运动幅度大且合理,还能模拟物理世界特性,具备强大的概念组合能力和想象力。数据上看,可灵支持生成长达2分钟的30fps的超长视频,分辨率高达1080p,且支持多种宽高比。另外再划个重点,可灵不是实验室放出的Demo或者视频结果演示,而是短视频领域头部玩家快手推出的产品级应用。而且主打一个务实,不开空头支票、发布即上线,可灵大模型已在快影
