

北大推出全新机器人多模态大模型!面向通用和机器人场景的高效推理和操作


AIxiv专栏是本站发布学术、技术内容的栏目。过去数年,本站AIxiv专栏接收报道了2000多篇内容,覆盖全球各大高校与企业的顶级实验室,有效促进了学术交流与传播。如果您有优秀的工作想要分享,欢迎投稿或者联系报道。投稿邮箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com
为了赋予机器人端到端的推理和操纵能力,本文创新性地将视觉编码器与高效的状态空间语言模型集成,构建了全新的 RoboMamba 多模态大模型,使其具备视觉常识任务和机器人相关任务的推理能力,并都取得了先进的性能表现。同时,本文发现当 RoboMamba 具备强大的推理能力后,我们可以通过极低的训练成本使得 RoboMamba 掌握多种操纵位姿预测能力。
论文:RoboMamba: Multimodal State Space Model for Efficient Robot Reasoning and Manipulation
论文链接:https://arxiv.org/abs/2406.04339
项目主页:https://sites.google.com/view/robomamba-web
Github:https://github.com/lmzpai/roboMamba
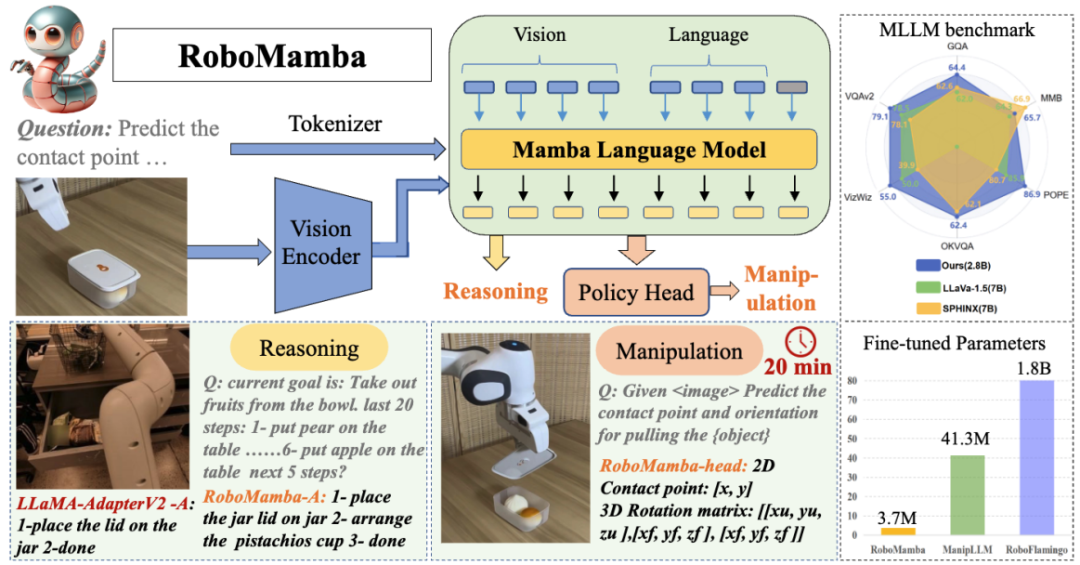
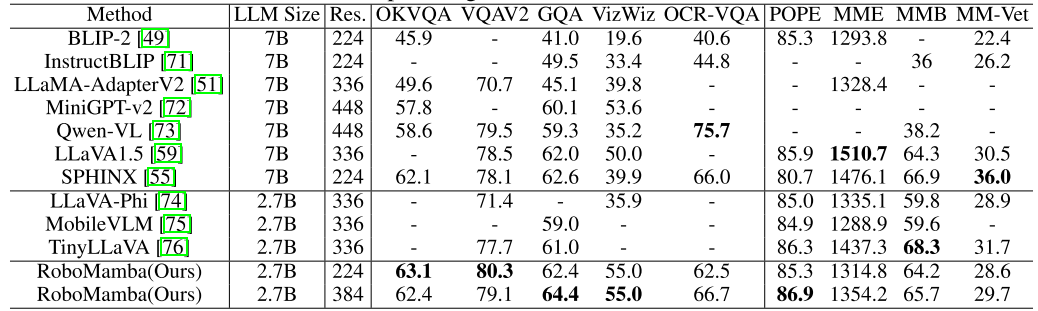
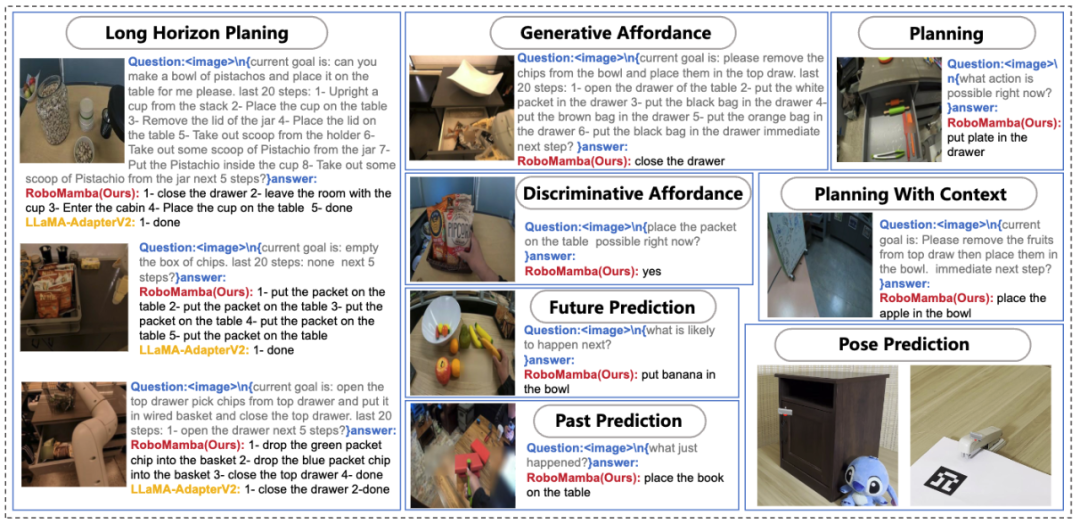
我们创新地将视觉编码器与高效的 Mamba 语言模型集成,构建了全新的端到端机器人多模态大模型,RoboMamba,其具备视觉常识和机器人相关的全面推理能力。 为了使 RoboMamba 具备末端执行器操纵位姿预测能力,我们探索了一种使用简单 Policy Head 的高效微调策略。我们发现,一旦 RoboMamba 达到足够的推理能力,它可以以极低的成本掌握操纵位姿预测技能。 在我们的大量实验中,RoboMamba 在通用和机器人推理评估基准上表现出色,并在模拟器和真实世界实验中展示了令人印象深刻的位姿预测结果。
问题陈述
 和语言问题
和语言问题 生成语言答案
生成语言答案 ,表示为
,表示为 。推理答案通常包含单独的子任务
。推理答案通常包含单独的子任务 对于一个问题
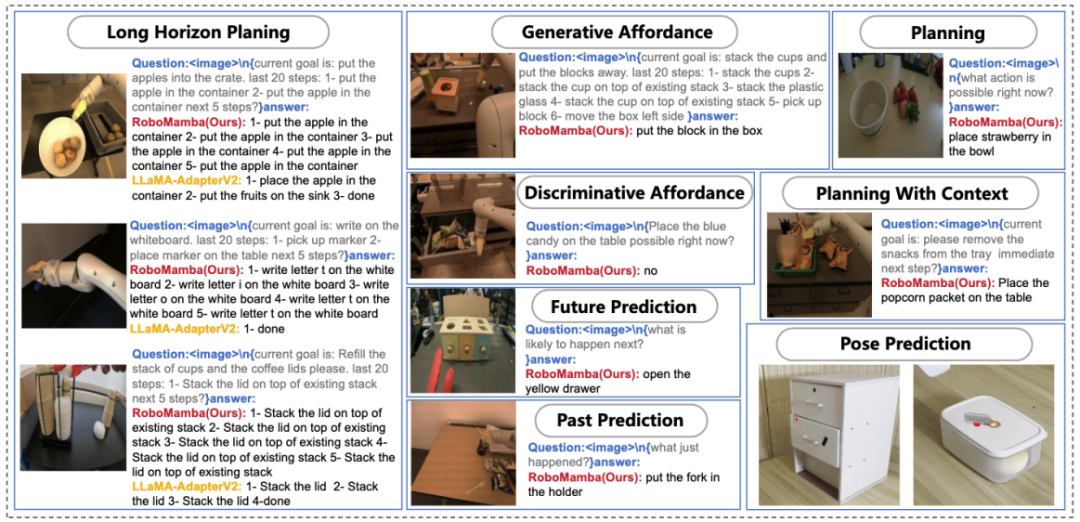
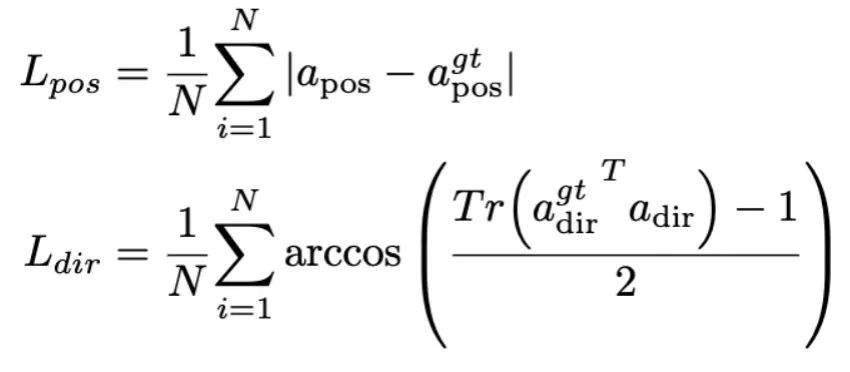
对于一个问题 。例如,当面对一个计划问题,如 “如何收拾桌子?”,反应通常包括 “第一步:捡起物体” 和 “第二步:把物体放入盒子” 等步骤。对于动作预测,我们利用一个高效简单的策略头 π 来预测动作
。例如,当面对一个计划问题,如 “如何收拾桌子?”,反应通常包括 “第一步:捡起物体” 和 “第二步:把物体放入盒子” 等步骤。对于动作预测,我们利用一个高效简单的策略头 π 来预测动作 。根据之前的工作,我们使用 6-DoF 来表达 Franka Emika Panda 机械臂的末端执行器位姿。6 自由度包括末端执行器位置
。根据之前的工作,我们使用 6-DoF 来表达 Franka Emika Panda 机械臂的末端执行器位姿。6 自由度包括末端执行器位置 表示三维坐标,方向
表示三维坐标,方向 表示旋转矩阵。如果训练抓取任务,我们将抓夹状态添加到位姿预测中,从而实现 7-DoF 控制。
表示旋转矩阵。如果训练抓取任务,我们将抓夹状态添加到位姿预测中,从而实现 7-DoF 控制。状态空间模型 (SSM)
 ,将 1D 输入序列
,将 1D 输入序列 投影到 1D 输出序列
投影到 1D 输出序列 。SSM 由三个关键参数组成:状态矩阵
。SSM 由三个关键参数组成:状态矩阵 ,输入矩阵
,输入矩阵 ,输出矩阵
,输出矩阵 。SSM 可以表示为:
。SSM 可以表示为:
 和
和 。离散化采用零阶保持方法,定义如下:
。离散化采用零阶保持方法,定义如下: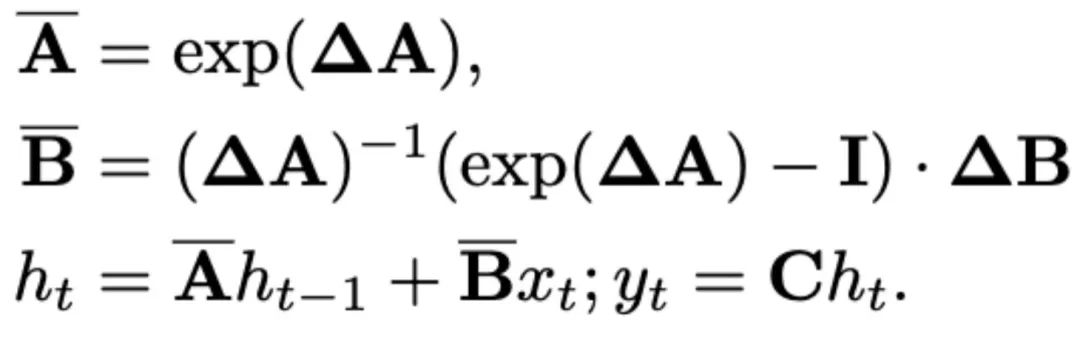
 ,实现更好的内容感知推理。下图 3 中展示了 Mamba block 的详细信息。
,实现更好的内容感知推理。下图 3 中展示了 Mamba block 的详细信息。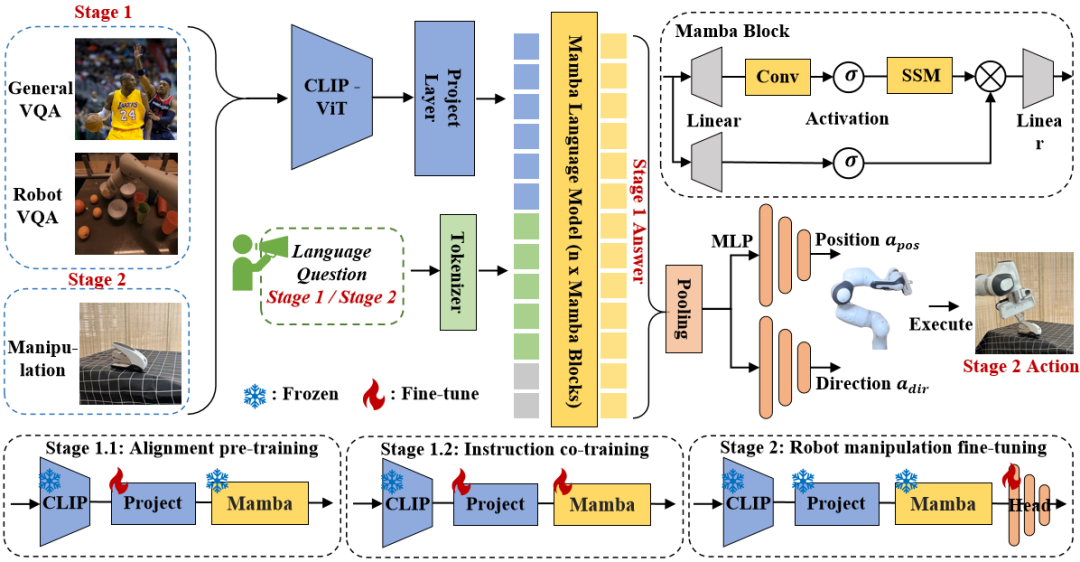
 ,其中 B 和 N 分别表示 batch size 和 token 数。与最近的 MLLMs 不同,我们不采用视觉编码器集成技术,这种技术使用了多种骨干网络(即 DINOv2、CLIP-ConvNeXt、CLIP-ViT)进行图像特征提取。集成引入了额外的计算成本,严重影响了机器人 MLLM 在现实世界中的实用性。因此,我们证明了,当高质量数据和适当的训练策略结合时,简单且直接的模型设计也能实现强大的推理能力。为了使 LLM 理解视觉特征,我们使用多层感知器(MLP)将视觉编码器连接到 LLM。通过这个简单的跨模态连接器,RoboMamba 可以将视觉信息转换为语言嵌入空间
,其中 B 和 N 分别表示 batch size 和 token 数。与最近的 MLLMs 不同,我们不采用视觉编码器集成技术,这种技术使用了多种骨干网络(即 DINOv2、CLIP-ConvNeXt、CLIP-ViT)进行图像特征提取。集成引入了额外的计算成本,严重影响了机器人 MLLM 在现实世界中的实用性。因此,我们证明了,当高质量数据和适当的训练策略结合时,简单且直接的模型设计也能实现强大的推理能力。为了使 LLM 理解视觉特征,我们使用多层感知器(MLP)将视觉编码器连接到 LLM。通过这个简单的跨模态连接器,RoboMamba 可以将视觉信息转换为语言嵌入空间 。
。 ,然后与视觉 token 连接(cat)并输入 Mamba。我们利用 Mamba 强大的序列建模来理解多模态信息,并使用有效的训练策略来开发视觉推理能力(如下一节所述)。输出 token (
,然后与视觉 token 连接(cat)并输入 Mamba。我们利用 Mamba 强大的序列建模来理解多模态信息,并使用有效的训练策略来开发视觉推理能力(如下一节所述)。输出 token ( ) 然后被解码(det),生成自然语言响应
) 然后被解码(det),生成自然语言响应 。模型的前向过程可以表示如下:
。模型的前向过程可以表示如下:
Stage 1.1:对齐预训练。
Stage 1.2:指令共同训练。





以上是北大推出全新机器人多模态大模型!面向通用和机器人场景的高效推理和操作的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 一键生成PPT!Kimi :让「PPT民工」先浪起来
Aug 01, 2024 pm 03:28 PM
一键生成PPT!Kimi :让「PPT民工」先浪起来
Aug 01, 2024 pm 03:28 PM
Kimi:一句话,十几秒钟,一份PPT就新鲜出炉了。PPT这玩意儿,可太招人烦了!开个碰头会,要有PPT;写个周报,要做PPT;拉个投资,要展示PPT;就连控诉出轨,都得发个PPT。大学更像是学了个PPT专业,上课看PPT,下课做PPT。或许,37年前丹尼斯・奥斯汀发明PPT时也没想到,有一天PPT竟如此泛滥成灾。吗喽们做PPT的苦逼经历,说起来都是泪。「一份二十多页的PPT花了三个月,改了几十遍,看到PPT都想吐」;「最巅峰的时候,一天做了五个PPT,连呼吸都是PPT」;「临时开个会,都要做个
 值得你花时间看的扩散模型教程,来自普渡大学
Apr 07, 2024 am 09:01 AM
值得你花时间看的扩散模型教程,来自普渡大学
Apr 07, 2024 am 09:01 AM
Diffusion不仅可以更好地模仿,而且可以进行「创作」。扩散模型(DiffusionModel)是一种图像生成模型。与此前AI领域大名鼎鼎的GAN、VAE等算法,扩散模型另辟蹊径,其主要思想是一种先对图像增加噪声,再逐步去噪的过程。其中如何去噪还原原图像是算法的核心部分。最终算法能够从一张随机的噪声图像中生成图像。近年来,生成式AI的惊人增长将文本转换为图像生成、视频生成等领域的许多令人兴奋的应用提供了支持。这些生成工具背后的基本原理是扩散的概念,这是一种特殊的采样机制,克服了以前的方法中被
 CVPR 2024全部奖项公布!近万人线下参会,谷歌华人研究员获最佳论文奖
Jun 20, 2024 pm 05:43 PM
CVPR 2024全部奖项公布!近万人线下参会,谷歌华人研究员获最佳论文奖
Jun 20, 2024 pm 05:43 PM
北京时间6月20日凌晨,在西雅图举办的国际计算机视觉顶会CVPR2024正式公布了最佳论文等奖项。今年共有10篇论文获奖,其中2篇最佳论文,2篇最佳学生论文,另外还有2篇最佳论文提名和4篇最佳学生论文提名。计算机视觉(CV)领域的顶级会议是CVPR,每年都会吸引大量研究机构和高校参会。据统计,今年共提交了11532份论文,2719篇被接收,录用率为23.6%。根据佐治亚理工学院对CVPR2024的数据统计分析,从研究主题来看,论文数量最多的是图像和视频合成与生成(Imageandvideosyn
 从裸机到700亿参数大模型,这里有份教程,还有现成可用的脚本
Jul 24, 2024 pm 08:13 PM
从裸机到700亿参数大模型,这里有份教程,还有现成可用的脚本
Jul 24, 2024 pm 08:13 PM
我们知道LLM是在大规模计算机集群上使用海量数据训练得到的,本站曾介绍过不少用于辅助和改进LLM训练流程的方法和技术。而今天,我们要分享的是一篇深入技术底层的文章,介绍如何将一堆连操作系统也没有的「裸机」变成用于训练LLM的计算机集群。这篇文章来自于AI初创公司Imbue,该公司致力于通过理解机器的思维方式来实现通用智能。当然,将一堆连操作系统也没有的「裸机」变成用于训练LLM的计算机集群并不是一个轻松的过程,充满了探索和试错,但Imbue最终成功训练了一个700亿参数的LLM,并在此过程中积累
 PyCharm社区版安装指南:快速掌握全部步骤
Jan 27, 2024 am 09:10 AM
PyCharm社区版安装指南:快速掌握全部步骤
Jan 27, 2024 am 09:10 AM
快速入门PyCharm社区版:详细安装教程全解析导言:PyCharm是一个功能强大的Python集成开发环境(IDE),它提供了一套全面的工具,可以帮助开发人员更高效地编写Python代码。本文将详细介绍如何安装PyCharm社区版,并提供具体的代码示例,帮助初学者快速入门。第一步:下载和安装PyCharm社区版要使用PyCharm,首先需要从其官方网站上下
 AI在用 | AI制作独居女孩生活Vlog,3天狂揽上万点赞量
Aug 07, 2024 pm 10:53 PM
AI在用 | AI制作独居女孩生活Vlog,3天狂揽上万点赞量
Aug 07, 2024 pm 10:53 PM
机器之能报道编辑:杨文以大模型、AIGC为代表的人工智能浪潮已经在悄然改变着我们生活及工作方式,但绝大部分人依然不知道该如何使用。因此,我们推出了「AI在用」专栏,通过直观、有趣且简洁的人工智能使用案例,来具体介绍AI使用方法,并激发大家思考。我们也欢迎读者投稿亲自实践的创新型用例。视频链接:https://mp.weixin.qq.com/s/2hX_i7li3RqdE4u016yGhQ最近,独居女孩的生活Vlog在小红书上走红。一个插画风格的动画,再配上几句治愈系文案,短短几天就能轻松狂揽上
 技术入门者必看:C语言和Python难易程度解析
Mar 22, 2024 am 10:21 AM
技术入门者必看:C语言和Python难易程度解析
Mar 22, 2024 am 10:21 AM
标题:技术入门者必看:C语言和Python难易程度解析,需要具体代码示例在当今数字化时代,编程技术已成为一项越来越重要的能力。无论是想要从事软件开发、数据分析、人工智能等领域,还是仅仅出于兴趣学习编程,选择一门合适的编程语言是第一步。而在众多编程语言中,C语言和Python作为两种广泛应用的编程语言,各有其特点。本文将对C语言和Python的难易程度进行解析
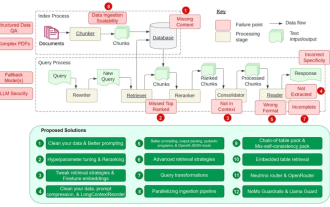 细数RAG的12个痛点,英伟达高级架构师亲授解决方案
Jul 11, 2024 pm 01:53 PM
细数RAG的12个痛点,英伟达高级架构师亲授解决方案
Jul 11, 2024 pm 01:53 PM
检索增强式生成(RAG)是一种使用检索提升语言模型的技术。具体来说,就是在语言模型生成答案之前,先从广泛的文档数据库中检索相关信息,然后利用这些信息来引导生成过程。这种技术能极大提升内容的准确性和相关性,并能有效缓解幻觉问题,提高知识更新的速度,并增强内容生成的可追溯性。RAG无疑是最激动人心的人工智能研究领域之一。有关RAG的更多详情请参阅本站专栏文章《专补大模型短板的RAG有哪些新进展?这篇综述讲明白了》。但RAG也并非完美,用户在使用时也常会遭遇一些「痛点」。近日,英伟达生成式AI高级解决
