

Javascript图像处理—虚拟边缘介绍及使用方法_javascript技巧

上一篇文章,我们来给矩阵添加一些常用方法,这篇文章将讲解图像的虚拟边缘。
虚拟边缘
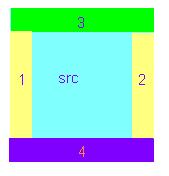
虚拟边缘就是按照一定映射关系,给图像添加边缘。
那么虚拟边缘有什么用呢?比如可以很容易做一个倒影的效果:

当然这只是附带效果了,虚拟边缘主要用在图像卷积运算(例如平滑操作)时候,由于卷积运算的特点,需要将图片扩大才能对边角进行卷积运算,这时候就需要对图片进行预处理,添加虚拟边缘。
说白了,就是在一些图片处理前进行预处理。
边缘类型
这里参考OpenCV相关文档的边缘描述:
/*
Various border types, image boundaries are denoted with '|'
* BORDER_REPLICATE: aaaaaa|abcdefgh|hhhhhhh
* BORDER_REFLECT: fedcba|abcdefgh|hgfedcb
* BORDER_REFLECT_101: gfedcb|abcdefgh|gfedcba
* BORDER_WRAP: cdefgh|abcdefgh|abcdefg
* BORDER_CONSTANT: iiiiii|abcdefgh|iiiiiii with some specified 'i'
*/
举个例子BODER_REFLECT就是对于某一行或某一列像素点:
abcdefgh
其左的虚拟边缘对应为fedcba,右边对应为hgfedcb,也就是反射映射。上图就是通过对图片底部进行添加BORDER_REFLECT类型的虚拟边缘得到的。
而BORDER_CONSTANT则是所有边缘都是固定值i。
实现
因为BORDER_CONSTANT比较特殊,所以和其他类型分开处理。
function copyMakeBorder(__src, __top, __left, __bottom, __right, __borderType, __value){
if(__src.type != "CV_RGBA"){
console.error("不支持类型!");
}
if(__borderType === CV_BORDER_CONSTANT){
return copyMakeConstBorder_8U(__src, __top, __left, __bottom, __right, __value);
}else{
return copyMakeBorder_8U(__src, __top, __left, __bottom, __right, __borderType);
}
};
这个函数接受一个输入矩阵src,每个方向要添加的像素大小top,left,bottom,right,边缘的类型borderType,还有一个数组value,即如果是常数边缘时候添加的常数值。
然后我们引入一个边缘的映射关系函数borderInterpolate。
function borderInterpolate(__p, __len, __borderType){
if(__p = __len){
switch(__borderType){
case CV_BORDER_REPLICATE:
__p = __p break;
case CV_BORDER_REFLECT:
case CV_BORDER_REFLECT_101:
var delta = __borderType == CV_BORDER_REFLECT_101;
if(__len == 1)
return 0;
do{
if(__p __p = -__p - 1 + delta;
else
__p = __len - 1 - (__p - __len) - delta;
}while(__p = __len)
break;
case CV_BORDER_WRAP:
if(__p __p -= ((__p - __len + 1) / __len) * __len;
if(__p >= __len)
__p %= __len;
break;
case CV_BORDER_CONSTANT:
__p = -1;
default:
error(arguments.callee, UNSPPORT_BORDER_TYPE/* {line} */);
}
}
return __p;
};
这个函数的意义是对于原长度为len的某一行或者某一列的虚拟像素点p(p一般是负数或者大于或等于该行原长度的数,负数则表示该行左边的像素点,大于或等于原长度则表示是右边的像素点),映射成这一行的哪一个像素点。我们拿CV_BORDER_REPLICATE分析一下,其表达式是:
__p = __p 也就是说p为负数时(也就是左边)的时候映射为0,否则映射成len - 1。
然后我们来实现copyMakeBorder_8U函数:
function copyMakeBorder_8U(__src, __top, __left, __bottom, __right, __borderType){
var i, j;
var width = __src.col,
height = __src.row;
var top = __top,
left = __left || __top,
right = __right || left,
bottom = __bottom || top,
dstWidth = width + left + right,
dstHeight = height + top + bottom,
borderType = borderType || CV_BORDER_REFLECT;
var buffer = new ArrayBuffer(dstHeight * dstWidth * 4),
tab = new Uint32Array(left + right);
for(i = 0; i tab[i] = borderInterpolate(i - left, width, __borderType);
}
for(i = 0; i tab[i + left] = borderInterpolate(width + i, width, __borderType);
}
var tempArray, data;
for(i = 0; i tempArray = new Uint32Array(buffer, (i + top) * dstWidth * 4, dstWidth);
data = new Uint32Array(__src.buffer, i * width * 4, width);
for(j = 0; j tempArray[j] = data[tab[j]];
for(j = 0; j tempArray[j + width + left] = data[tab[j + left]];
tempArray.set(data, left);
}
var allArray = new Uint32Array(buffer);
for(i = 0; i j = borderInterpolate(i - top, height, __borderType);
tempArray = new Uint32Array(buffer, i * dstWidth * 4, dstWidth);
tempArray.set(allArray.subarray((j + top) * dstWidth, (j + top + 1) * dstWidth));
}
for(i = 0; i j = borderInterpolate(i + height, height, __borderType);
tempArray = new Uint32Array(buffer, (i + top + height) * dstWidth * 4, dstWidth);
tempArray.set(allArray.subarray((j + top) * dstWidth, (j + top + 1) * dstWidth));
}
return new Mat(dstHeight, dstWidth, new Uint8ClampedArray(buffer));
}
这里需要解释下,边缘的复制顺序是:先对每行的左右进行扩展,然后在此基础上进行上下扩展,如图所示。
然后我们根据ArrayBuffer的性质,将数据转成无符号32位整数来操作,这样每个操作单位就对应了每个像素点了。什么意思?
比如对于某个像素点:RGBA,由于某个通道是用无符号8为整数来存储的,所以实际上一个像素点则对应了32位的存储大小,由于ArrayBuffer的性质,可以将数据转成任意类型来处理,这样我们就可以通过转成Uint32Array类型,将数据变成每个像素点的数据数组。
那么copyMakeConstBorder_8U就比较容易实现了:
function copyMakeConstBorder_8U(__src, __top, __left, __bottom, __right, __value){
var i, j;
var width = __src.col,
height = __src.row;
var top = __top,
left = __left || __top,
right = __right || left,
bottom = __bottom || top,
dstWidth = width + left + right,
dstHeight = height + top + bottom,
value = __value || [0, 0, 0, 255];
var constBuf = new ArrayBuffer(dstWidth * 4),
constArray = new Uint8ClampedArray(constBuf);
buffer = new ArrayBuffer(dstHeight * dstWidth * 4);
for(i = 0; i for( j = 0; j constArray[i * 4 + j] = value[j];
}
}
constArray = new Uint32Array(constBuf);
var tempArray;
for(i = 0; i tempArray = new Uint32Array(buffer, (i + top) * dstWidth * 4, left);
tempArray.set(constArray.subarray(0, left));
tempArray = new Uint32Array(buffer, ((i + top + 1) * dstWidth - right) * 4, right);
tempArray.set(constArray.subarray(0, right));
tempArray = new Uint32Array(buffer, ((i + top) * dstWidth + left) * 4, width);
tempArray.set(new Uint32Array(__src.buffer, i * width * 4, width));
}
for(i = 0; i tempArray = new Uint32Array(buffer, i * dstWidth * 4, dstWidth);
tempArray.set(constArray);
}
for(i = 0; i tempArray = new Uint32Array(buffer, (i + top + height) * dstWidth * 4, dstWidth);
tempArray.set(constArray);
}
return new Mat(dstHeight, dstWidth, new Uint8ClampedArray(buffer));
}
效果图
CV_BORDER_REPLICATE

CV_BORDER_REFLECT

CV_BORDER_WRAP

CV_BORDER_CONSTANT


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 Wasserstein距离在图像处理任务中的应用方法是什么?
Jan 23, 2024 am 10:39 AM
Wasserstein距离在图像处理任务中的应用方法是什么?
Jan 23, 2024 am 10:39 AM
Wasserstein距离,又称为EarthMover'sDistance(EMD),是一种用于度量两个概率分布之间差异的度量方法。相比于传统的KL散度或JS散度,Wasserstein距离考虑了分布之间的结构信息,因此在许多图像处理任务中展现出更好的性能。通过计算两个分布之间的最小运输成本,Wasserstein距离能够测量将一个分布转换为另一个分布所需的最小工作量。这种度量方法能够捕捉到分布之间的几何差异,从而在图像生成、风格迁移等任务中发挥重要作用。因此,Wasserstein距离成为了概
 深入解析Vision Transformer(VIT)模型的工作原理和特点
Jan 23, 2024 am 08:30 AM
深入解析Vision Transformer(VIT)模型的工作原理和特点
Jan 23, 2024 am 08:30 AM
VisionTransformer(VIT)是Google提出的一种基于Transformer的图片分类模型。不同于传统CNN模型,VIT将图像表示为序列,并通过预测图像的类标签来学习图像结构。为了实现这一点,VIT将输入图像划分为多个补丁,并将每个补丁中的像素通过通道连接,然后进行线性投影以达到所需的输入维度。最后,每个补丁被展平为单个向量,从而形成输入序列。通过Transformer的自注意力机制,VIT能够捕捉到不同补丁之间的关系,并进行有效的特征提取和分类预测。这种序列化的图像表示方法为
 AI技术在图像超分辨率重建方面的应用
Jan 23, 2024 am 08:06 AM
AI技术在图像超分辨率重建方面的应用
Jan 23, 2024 am 08:06 AM
超分辨率图像重建是利用深度学习技术,如卷积神经网络(CNN)和生成对抗网络(GAN),从低分辨率图像中生成高分辨率图像的过程。该方法的目标是通过将低分辨率图像转换为高分辨率图像,从而提高图像的质量和细节。这种技术在许多领域都有广泛的应用,如医学影像、监控摄像、卫星图像等。通过超分辨率图像重建,我们可以获得更清晰、更具细节的图像,有助于更准确地分析和识别图像中的目标和特征。重建方法超分辨率图像重建的方法通常可以分为两类:基于插值的方法和基于深度学习的方法。1)基于插值的方法基于插值的超分辨率图像重
 Java开发:如何实现图像识别和处理
Sep 21, 2023 am 08:39 AM
Java开发:如何实现图像识别和处理
Sep 21, 2023 am 08:39 AM
Java开发:图像识别与处理实践指南摘要:随着计算机视觉和人工智能的快速发展,图像识别和处理在各个领域都起到了重要作用。本文将介绍如何利用Java语言实现图像识别和处理,并提供具体的代码示例。一、图像识别的基本原理图像识别是指利用计算机技术对图像进行分析和理解,从而识别出图像中的对象、特征或内容。在进行图像识别之前,我们需要先了解一些基本的图像处理技术,如图
 C#开发中如何处理图像处理和图形界面设计问题
Oct 08, 2023 pm 07:06 PM
C#开发中如何处理图像处理和图形界面设计问题
Oct 08, 2023 pm 07:06 PM
C#开发中如何处理图像处理和图形界面设计问题,需要具体代码示例引言:在现代软件开发中,图像处理和图形界面设计是常见的需求。而C#作为一种通用的高级编程语言,具有强大的图像处理和图形界面设计能力。本文将以C#为基础,讨论如何处理图像处理和图形界面设计问题,并给出详细的代码示例。一、图像处理问题:图像读取和显示:在C#中,图像的读取和显示是基本操作。可以使用.N
 使用AI技术修复老照片的实现方法(附示例和代码解析)
Jan 24, 2024 pm 09:57 PM
使用AI技术修复老照片的实现方法(附示例和代码解析)
Jan 24, 2024 pm 09:57 PM
老照片修复是利用人工智能技术对老照片进行修复、增强和改善的方法。通过计算机视觉和机器学习算法,该技术能够自动识别并修复老照片中的损坏和缺陷,使其看起来更加清晰、自然和真实。老照片修复的技术原理主要包括以下几个方面:1.图像去噪和增强修复老照片时,需要先对其进行去噪和增强处理。可以使用图像处理算法和滤波器,如均值滤波、高斯滤波、双边滤波等,来解决噪点和色斑问题,从而提升照片的质量。2.图像复原和修复在老照片中,可能存在一些缺陷和损坏,例如划痕、裂缝、褪色等。这些问题可以通过图像复原和修复算法来解决
 PHP学习笔记:人脸识别与图像处理
Oct 08, 2023 am 11:33 AM
PHP学习笔记:人脸识别与图像处理
Oct 08, 2023 am 11:33 AM
PHP学习笔记:人脸识别与图像处理前言:随着人工智能技术的发展,人脸识别和图像处理成为了热门话题。在实际应用中,人脸识别与图像处理多用于安全监控、人脸解锁、卡牌比对等方面。而PHP作为一种常用的服务器端脚本语言,也可以用来实现人脸识别与图像处理的相关功能。本篇文章将带你了解PHP中的人脸识别与图像处理,并附有具体的代码示例。一、PHP中的人脸识别人脸识别是一
 尺度转换不变特征(SIFT)算法
Jan 22, 2024 pm 05:09 PM
尺度转换不变特征(SIFT)算法
Jan 22, 2024 pm 05:09 PM
尺度不变特征变换(SIFT)算法是一种用于图像处理和计算机视觉领域的特征提取算法。该算法于1999年提出,旨在提高计算机视觉系统中的物体识别和匹配性能。SIFT算法具有鲁棒性和准确性,被广泛应用于图像识别、三维重建、目标检测、视频跟踪等领域。它通过在多个尺度空间中检测关键点,并提取关键点周围的局部特征描述符来实现尺度不变性。SIFT算法的主要步骤包括尺度空间的构建、关键点检测、关键点定位、方向分配和特征描述符生成。通过这些步骤,SIFT算法能够提取出具有鲁棒性和独特性的特征,从而实现对图像的高效
