

Python使用OpenCV进行标定

这篇文章主要介绍了关于Python使用OpenCV进行标定,有着一定的参考价值,现在分享给大家,有需要的朋友可以参考一下
本文结合OpenCV官方样例,对官方样例中的代码进行修改,使其能够正常运行,并对自己采集的数据进行实验和讲解。
一、准备
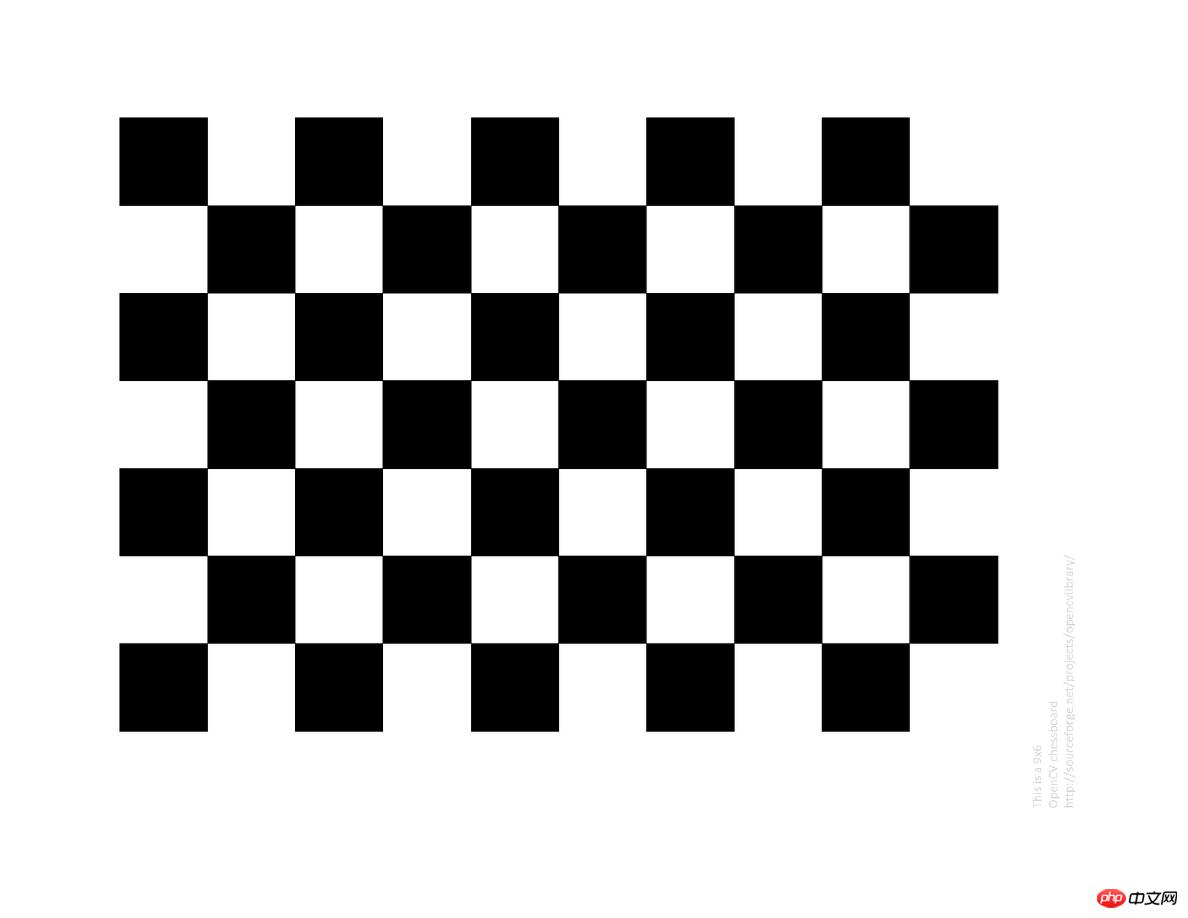
OpenCV使用棋盘格板进行标定,如下图所示。为了标定相机,我们需要输入一系列三维点和它们对应的二维图像点。在黑白相间的棋盘格上,二维图像点很容易通过角点检测找到。而对于真实世界中的三维点呢?由于我们采集中,是将相机放在一个地方,而将棋盘格定标板进行移动变换不同的位置,然后对其进行拍摄。所以我们需要知道(X,Y,Z)的值。但是简单来说,我们定义棋盘格所在平面为XY平面,即Z=0。对于定标板来说,我们可以知道棋盘格的方块尺寸,例如30mm,这样我们就可以把棋盘格上的角点坐标定义为(0,0,0),(30,0,0),(60,0,0),···,这个结果的单位是mm。
3D点称为object points,2D图像点称为image points。
二、检测棋盘格角点
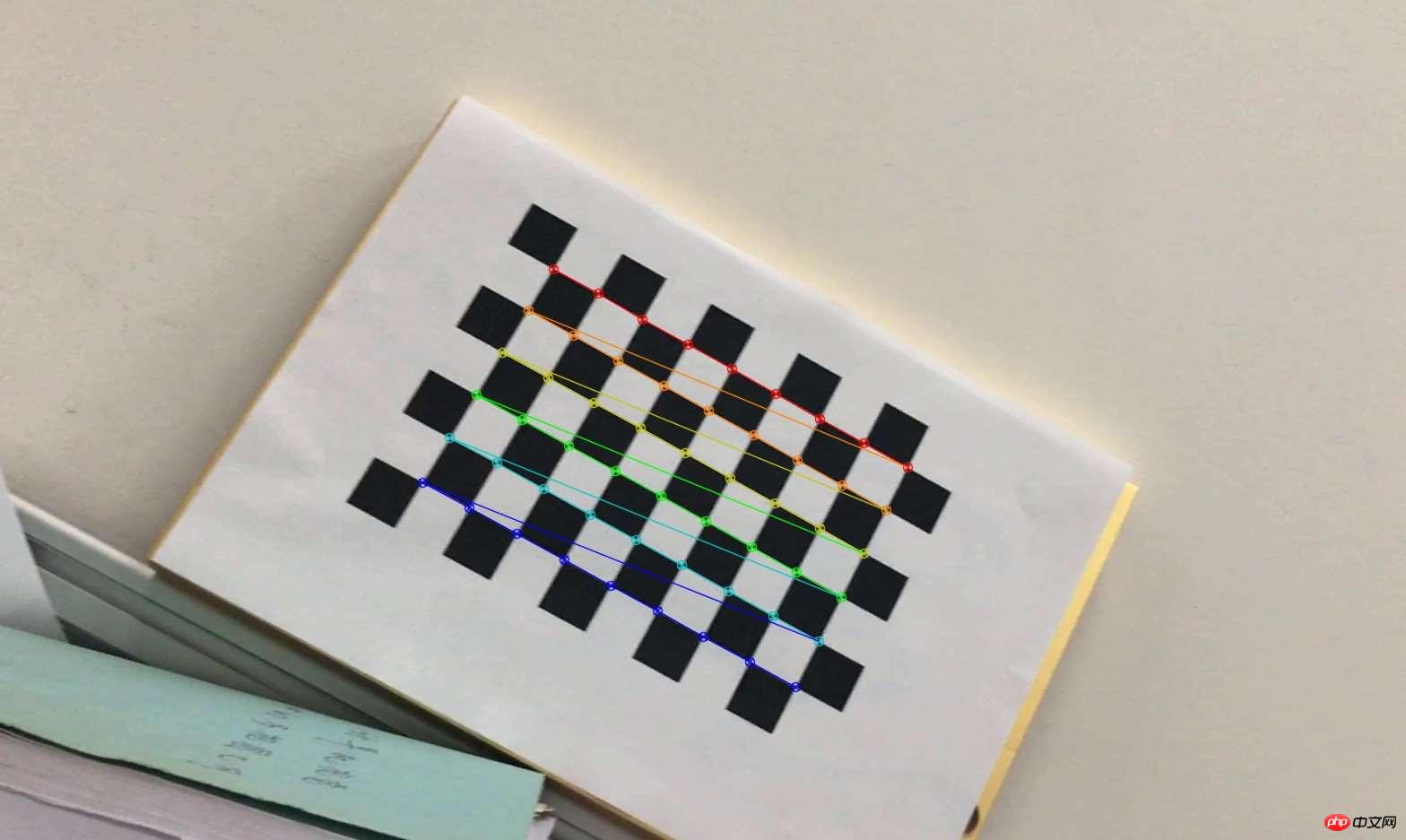
为了找到棋盘格模板,我们使用openCV中的函数cv2.findChessboardCorners()。我们也需要告诉程序我们使用的模板是什么规格的,例如8*8的棋盘格或者5*5棋盘格等,建议使用x方向和y方向个数不相等的棋盘格模板。下面实验中,我们使用的是10*7的棋盘格,每个方格边长是20mm,即含有9*6的内部角点。这个函数如果检测到模板,会返回对应的角点,并返回true。当然不一定所有的图像都能找到需要的模板,所以我们可以使用多幅图像进行定标。除了使用棋盘格,我们还可以使用圆点阵,对应的函数为cv2.findCirclesGrid()。
找到角点后,我们可以使用cv2.cornerSubPix()可以得到更为准确的角点像素坐标。我们也可以使用cv2.drawChessboardCorners()将角点绘制到图像上显示。如下图所示:
三、标定
通过上面的步骤,我们得到了用于标定的三维点和与其对应的图像上的二维点对。我们使用cv2.calibrateCamera()进行标定,这个函数会返回标定结果、相机的内参数矩阵、畸变系数、旋转矩阵和平移向量。
四、去畸变
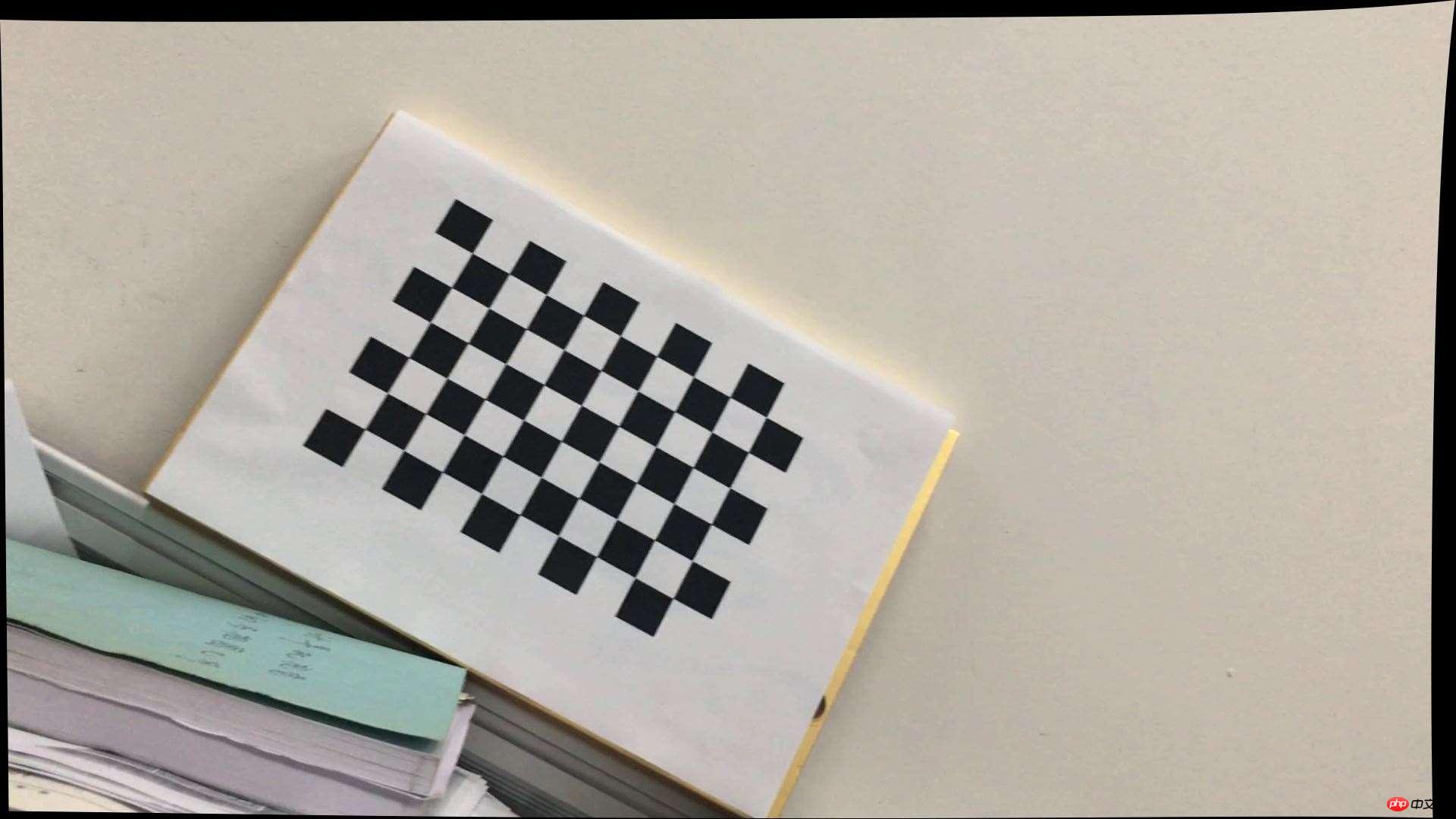
第三步我们已经得到了相机内参和畸变系数,在将图像去畸变之前,我们还可以使用cv.getOptimalNewCameraMatrix()优化内参数和畸变系数,通过设定自由自由比例因子alpha。当alpha设为0的时候,将会返回一个剪裁过的将去畸变后不想要的像素去掉的内参数和畸变系数;当alpha设为1的时候,将会返回一个包含额外黑色像素点的内参数和畸变系数,并返回一个ROI用于将其剪裁掉。
然后我们就可以使用新得到的内参数矩阵和畸变系数对图像进行去畸变了。有两种方法进行去畸变:
(1)使用cv2.undistort()
这是一个最直接的办法,只用直接调用函数就可以得到去畸变的图像,使用上面的ROI可以对其进行剪裁。代码如下:
# undistort dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
下图显示将一张图片去畸变后,保留黑色像素的结果:
(2)使用remmaping
这是一个分两步的方法,首先计算一个从畸变图像到非畸变图像的映射,然后使用这个映射关系对图像进行去畸变。
代码如下:
# undistort mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5) dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
五、反投影误差
通过反投影误差,我们可以来评估结果的好坏。越接近0,说明结果越理想。通过之前计算的内参数矩阵、畸变系数、旋转矩阵和平移向量,使用cv2.projectPoints()计算三维点到二维图像的投影,然后计算反投影得到的点与图像上检测到的点的误差,最后计算一个对于所有标定图像的平均误差,这个值就是反投影误差。
代码
所有步骤的代码如下所示:
#coding:utf-8 import cv2 import numpy as np import glob # 找棋盘格角点 # 阈值 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) #棋盘格模板规格 w = 9 h = 6 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 objp = np.zeros((w*h,3), np.float32) objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) # 储存棋盘格角点的世界坐标和图像坐标对 objpoints = [] # 在世界坐标系中的三维点 imgpoints = [] # 在图像平面的二维点 images = glob.glob('calib/*.png') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) # 如果找到足够点对,将其存储起来 if ret == True: cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) objpoints.append(objp) imgpoints.append(corners) # 将角点在图像上显示 cv2.drawChessboardCorners(img, (w,h), corners, ret) cv2.imshow('findCorners',img) cv2.waitKey(1) cv2.destroyAllWindows() # 标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 去畸变 img2 = cv2.imread('calib/00169.png') h, w = img2.shape[:2] newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数 dst = cv2.undistort(img2, mtx, dist, None, newcameramtx) # 根据前面ROI区域裁剪图片 #x,y,w,h = roi #dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst) # 反投影误差 total_error = 0 for i in xrange(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2) total_error += error print "total error: ", total_error/len(objpoints)
相关推荐:
以上是Python使用OpenCV进行标定的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 PHP和Python:代码示例和比较
Apr 15, 2025 am 12:07 AM
PHP和Python:代码示例和比较
Apr 15, 2025 am 12:07 AM
PHP和Python各有优劣,选择取决于项目需求和个人偏好。1.PHP适合快速开发和维护大型Web应用。2.Python在数据科学和机器学习领域占据主导地位。
 Python vs. JavaScript:社区,图书馆和资源
Apr 15, 2025 am 12:16 AM
Python vs. JavaScript:社区,图书馆和资源
Apr 15, 2025 am 12:16 AM
Python和JavaScript在社区、库和资源方面的对比各有优劣。1)Python社区友好,适合初学者,但前端开发资源不如JavaScript丰富。2)Python在数据科学和机器学习库方面强大,JavaScript则在前端开发库和框架上更胜一筹。3)两者的学习资源都丰富,但Python适合从官方文档开始,JavaScript则以MDNWebDocs为佳。选择应基于项目需求和个人兴趣。
 CentOS上PyTorch的GPU支持情况如何
Apr 14, 2025 pm 06:48 PM
CentOS上PyTorch的GPU支持情况如何
Apr 14, 2025 pm 06:48 PM
在CentOS系统上启用PyTorchGPU加速,需要安装CUDA、cuDNN以及PyTorch的GPU版本。以下步骤将引导您完成这一过程:CUDA和cuDNN安装确定CUDA版本兼容性:使用nvidia-smi命令查看您的NVIDIA显卡支持的CUDA版本。例如,您的MX450显卡可能支持CUDA11.1或更高版本。下载并安装CUDAToolkit:访问NVIDIACUDAToolkit官网,根据您显卡支持的最高CUDA版本下载并安装相应的版本。安装cuDNN库:前
 docker原理详解
Apr 14, 2025 pm 11:57 PM
docker原理详解
Apr 14, 2025 pm 11:57 PM
Docker利用Linux内核特性,提供高效、隔离的应用运行环境。其工作原理如下:1. 镜像作为只读模板,包含运行应用所需的一切;2. 联合文件系统(UnionFS)层叠多个文件系统,只存储差异部分,节省空间并加快速度;3. 守护进程管理镜像和容器,客户端用于交互;4. Namespaces和cgroups实现容器隔离和资源限制;5. 多种网络模式支持容器互联。理解这些核心概念,才能更好地利用Docker。
 minio安装centos兼容性
Apr 14, 2025 pm 05:45 PM
minio安装centos兼容性
Apr 14, 2025 pm 05:45 PM
MinIO对象存储:CentOS系统下的高性能部署MinIO是一款基于Go语言开发的高性能、分布式对象存储系统,与AmazonS3兼容。它支持多种客户端语言,包括Java、Python、JavaScript和Go。本文将简要介绍MinIO在CentOS系统上的安装和兼容性。CentOS版本兼容性MinIO已在多个CentOS版本上得到验证,包括但不限于:CentOS7.9:提供完整的安装指南,涵盖集群配置、环境准备、配置文件设置、磁盘分区以及MinI
 CentOS上PyTorch的分布式训练如何操作
Apr 14, 2025 pm 06:36 PM
CentOS上PyTorch的分布式训练如何操作
Apr 14, 2025 pm 06:36 PM
在CentOS系统上进行PyTorch分布式训练,需要按照以下步骤操作:PyTorch安装:前提是CentOS系统已安装Python和pip。根据您的CUDA版本,从PyTorch官网获取合适的安装命令。对于仅需CPU的训练,可以使用以下命令:pipinstalltorchtorchvisiontorchaudio如需GPU支持,请确保已安装对应版本的CUDA和cuDNN,并使用相应的PyTorch版本进行安装。分布式环境配置:分布式训练通常需要多台机器或单机多GPU。所
 CentOS上PyTorch版本怎么选
Apr 14, 2025 pm 06:51 PM
CentOS上PyTorch版本怎么选
Apr 14, 2025 pm 06:51 PM
在CentOS系统上安装PyTorch,需要仔细选择合适的版本,并考虑以下几个关键因素:一、系统环境兼容性:操作系统:建议使用CentOS7或更高版本。CUDA与cuDNN:PyTorch版本与CUDA版本密切相关。例如,PyTorch1.9.0需要CUDA11.1,而PyTorch2.0.1则需要CUDA11.3。cuDNN版本也必须与CUDA版本匹配。选择PyTorch版本前,务必确认已安装兼容的CUDA和cuDNN版本。Python版本:PyTorch官方支
 Python:自动化,脚本和任务管理
Apr 16, 2025 am 12:14 AM
Python:自动化,脚本和任务管理
Apr 16, 2025 am 12:14 AM
Python在自动化、脚本编写和任务管理中表现出色。1)自动化:通过标准库如os、shutil实现文件备份。2)脚本编写:使用psutil库监控系统资源。3)任务管理:利用schedule库调度任务。Python的易用性和丰富库支持使其在这些领域中成为首选工具。
