

扛住强风的无人机?加州理工用12分钟飞行数据教会无人机御风飞行

当风大到可以把伞吹坏的程度,无人机却稳稳当当,就像这样:
御风飞行是空中飞行的一部分,从大的层面来讲,当飞行员驾驶飞机着陆时,风速可能会给他们带来挑战;从小的层面来讲,阵风也会影响无人机的飞行。
目前来看,无人机要么在受控条件下飞行,无风;要么由人类使用遥控器操作。无人机被研究者控制在开阔的天空中编队飞行,但这些飞行通常是在理想的条件和环境下进行的。
然而,要想让无人机自主执行必要但日常的任务,例如运送包裹,无人机必须能够实时适应风况。
为了让无人机在风中飞行时具有更好的机动性,来自加州理工学院的一组工程师开发了一种深度神经网络 Neural-Fly,即一种人工智能工具,可以让无人机在有风的情况下保持敏捷,只需更新一些关键参数,即可帮助无人机实时应对新的和未知的风况。
文章开头我们已经初步见识到了无人机的抗风能力,下面展示了一架四旋翼无人机,借助该研究开发的工具,它可以在风速达到 27 英里 / 小时的情况下完成 8 字形穿梭操作:
换个角度观赏一下无人机御风飞行:
为了让无人机可以在各种风速下穿梭,数据是必不可少的,这项研究需要的数据不多,在获得短短 12 分钟的飞行数据后,配备 Neural-Fly 的自动四旋翼无人机就学会了如何对强风做出响应。「用到的数据量非常小,」加州理工学院航空航天系研究生 Michael O’Connell 表示,他是论文作者之一。
这项研究已于周三发表在《科学 · 机器人学》(Science Robotics) 杂志上。
- 论文地址:https://www.science.org/doi/10.1126/scirobotics.abm6597
- arXiv 地址:https://arxiv.org/pdf/2205.06908.pdf
在 Neural-Fly 实验训练中,无人机在风洞中飞行,有六种不同的风速,最快的是 13.4 英里 / 小时。
根据这些数据,该团队创建了深度神经网络,然后让他们的飞行器能够熟练地在同一风洞中进行机动,例如以 8 字形图案放大大门或通过两个椭圆形大门巡航。无人机在测试中的速度比它在训练中遇到的更快:大约每小时 27 英里。这是该风洞可以产生的最大风速,该论文作者、加州理工学院研究生石冠亚指出。除了只需要少量数据外,该软件仅在 Raspberry Pi 上运行,这是一种廉价的计算设备。
加州理工学院航空航天、控制和动力学系统教授、通讯作者 Soon-Jo Chung 表示,他们看到的误差率与现有的 SOTA 技术相比,配备新系统的无人机飞行性能要好 2.5 至 4 倍。
下图从左到右依次为石冠亚、Soon-Jo Chung 和 Michael O'Connell 。值得祝贺的是,石冠亚将在 2023 年 9 月入职卡内基梅隆大学计算机学院机器人研究所担任助理教授。
研究者表示,这项技术未来将被用于无人机快递或飞行汽车。
Neural-Fly 技术概览
无人机(UAV)如果想要实现持续的商业化,在动态高速风中执行安全和精确的飞行机动至关重要。但是,由于不同风况之间的关系以及它们对无人机机动性的影响没有得到深入地研究,因此使用传统控制设计方法来设计高效的机器人控制器具有挑战性。
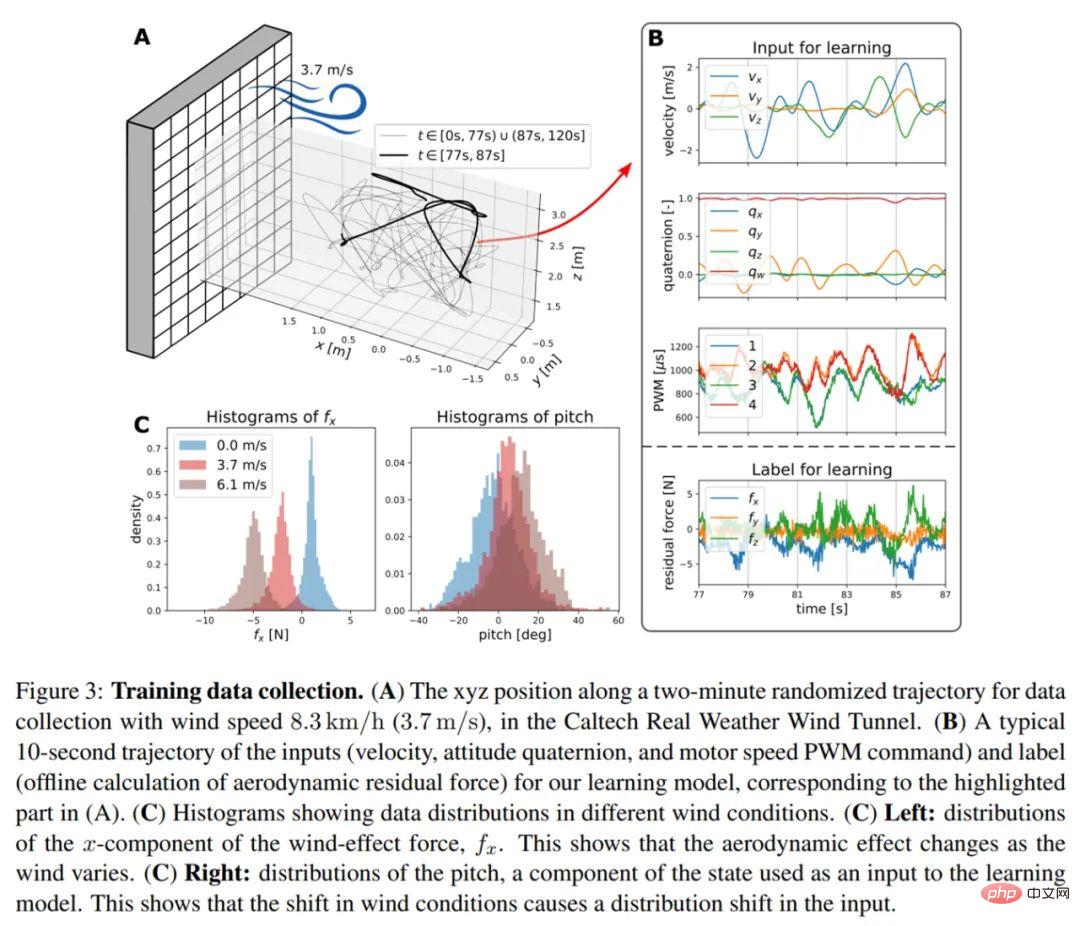
加州理工学院的研究者提出的「Neural-Fly」是一种数据驱动方法,它作为一种基于深度学习的轨迹跟踪控制器,可以学习快速适应快速变化的风况。下图 3(A) 为数据收集过程;3(B) 为风速 13.3km/h (3.7m/s) 的情况下,训练数据的输入和标签;3(C) 为不同风况下输入数据和标签数据的分布。
在线自适应 离线元学习
下图 2 为 Neural-Fly 方法概览,表明了它在自适应飞行控制和基于深度学习的机器人控制方面取得了进展。在标准 UAV 的动态风况下,Neural-Fly 实现了对灵活且具有挑战性轨迹的厘米级位置误差跟踪。具体来说,该方法主要有两部分组成,分别是离线学习阶段和用于实时在线学习的在线自适应控制阶段。
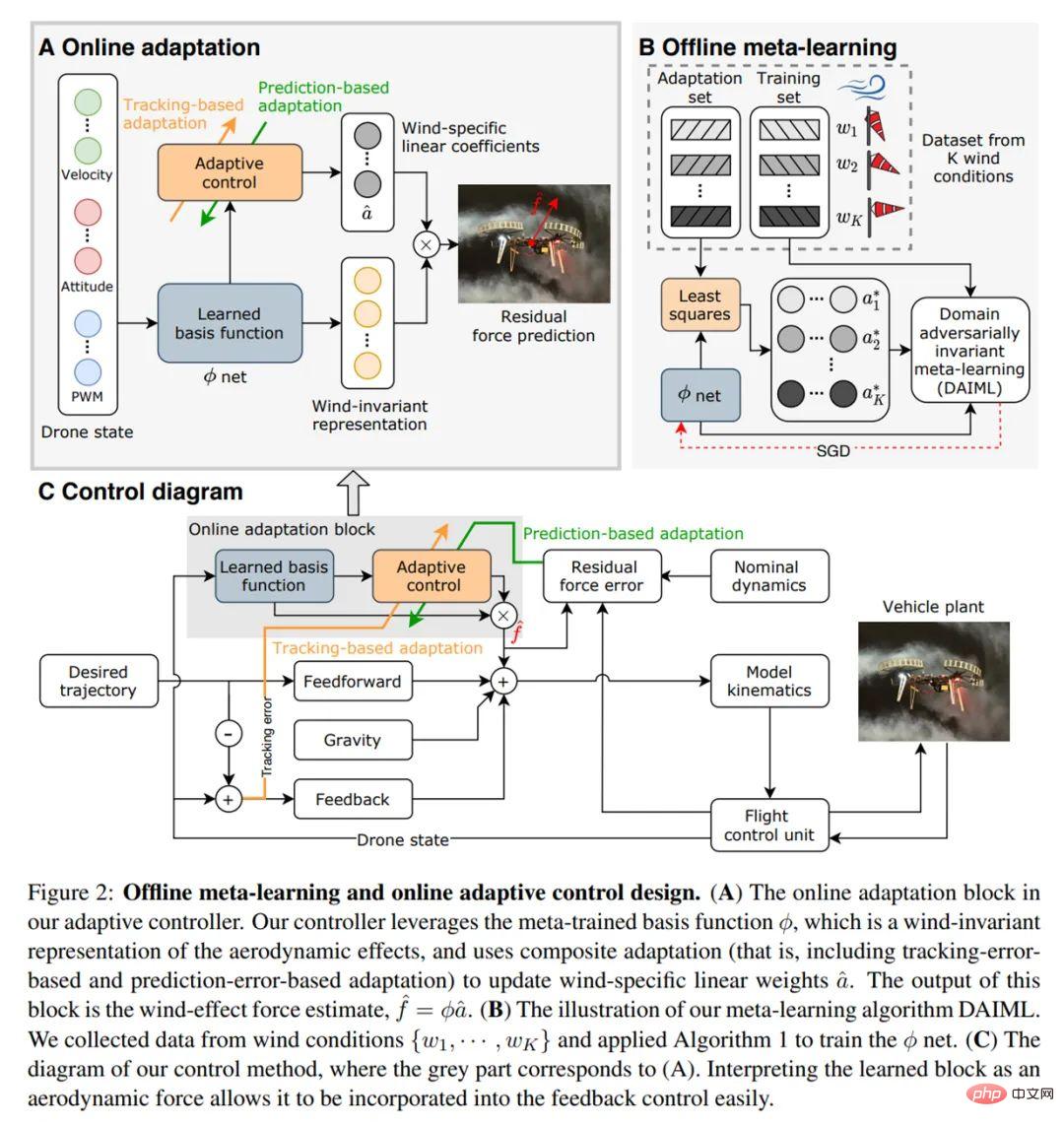
对于离线学习阶段,研究者开发了域对抗不变元学习(Domain Adversarially Invariant Meta-Learning, DAIML),它以一种数据高效的方式学习空气动力学与风况无关的深度神经网络(DNN)表示。该表示通过更新一组混合深度神经网络输出的线性系数来适应不同的风况。
DAIML 还具有数据高效性,仅使用 6 种不同风况下共计 12 分钟的飞行数据来训练深度神经网络。DAIML 包含的几种关键特性不仅可以提升数据效率,而且能够由下游在线自适应控制阶段提供信息。
值得注意的是,DAIML 使用谱归一化来控制深度神经网络的 Lipschitz 属性,以提高对未见过数据的泛化能力,并提供闭环稳定性和稳健性。此外,DAIML 还使用判别式网络来确保学得的表示具有风不变形,并且风相关信息仅包含在适应在线控制阶段的线性系数中。
对于在线自适应控制阶段,研究者开发了一种正则化复合自适应控制律,它是基于对学得表示如何与闭环控制系统交互的基本理解中得出的,并具有严格的理论支撑。
具体地,自适应律使用位置跟踪误差项和气动力预测误差项的组合来对与风有关的线性系数进行更新。这种方法有效地保证了对任何风况的稳定和快速适应以及对不完美学习的稳健性。尽管这种自适应控制律能够与很多学得的模型一起使用,但从 DAIML 中学习的精确表示有助于进一步提升自适应速度。
实验结果
就 Neural-Fly 的效果而言,它比非线性跟踪控制器平均提升 66%,比 L_1 自适应控制器提升 42%,比增量非线性动态反演(INDI)控制器提升 35%。所有这些结果都是使用标准四旋翼无人机硬件完成的,同时运行 PX4 的默认调节姿态控制。
即使与没有外部风干扰和使用更复杂硬件的相关工作(比如需要 10 倍控制频率和使用直流电动机速度反馈的板载光学传感器)相比,Neural-Fly 的跟踪性能也具有竞争力。
下表 1 为不同方法在不同风况下的误差跟踪统计。
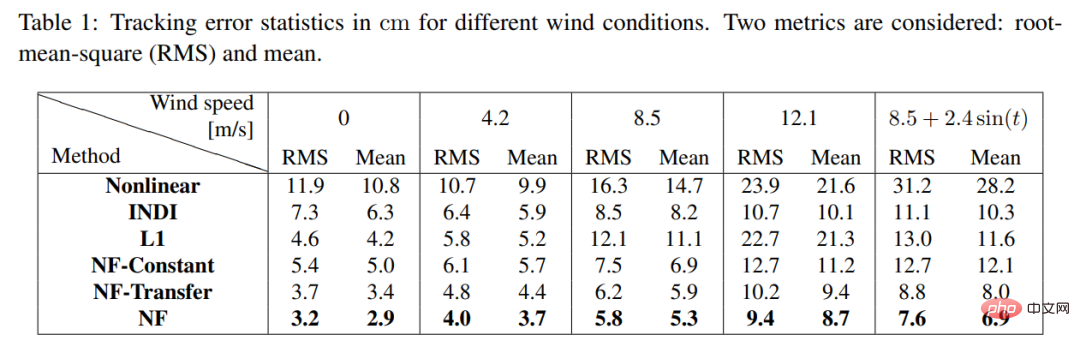
研究者将 Neural-Fly 与两个变体进行了比较,它们分别是 Neural-Fly-Transfer 和 Neural-Fly-Constant。其中,NF-Transfer 使用从不同无人机的数据上训练学得的表示,而 NF-Constant 仅使用具有 trivial 非学习基础的自适应控制律。
Neural-Fly-Transfer 表明了对无人机配置变化和模型不匹配的稳健性,NF-Constant、L_1 和 INDI 方法都直接适应未知动力学,而不假设底层物理结构,它们具有相似的性能。
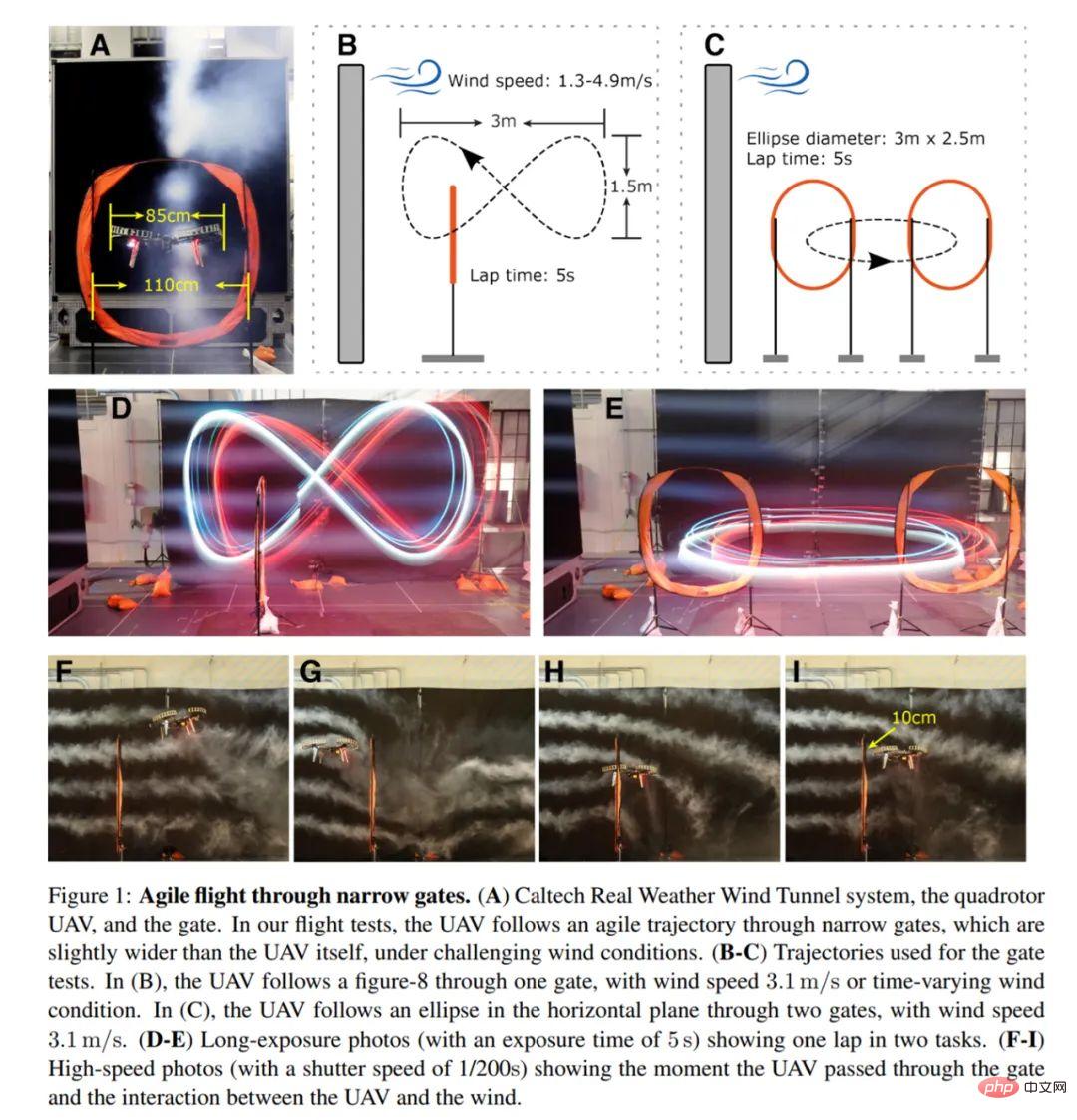
最后,研究者证明 Neural-Fly 能够实现一系列功能,允许无人机在狂风条件下遵循轨迹敏捷地飞过低高度门,具体如下图 1 所示。
以上是扛住强风的无人机?加州理工用12分钟飞行数据教会无人机御风飞行的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 字节跳动剪映推出 SVIP 超级会员:连续包年 499 元,提供多种 AI 功能
Jun 28, 2024 am 03:51 AM
字节跳动剪映推出 SVIP 超级会员:连续包年 499 元,提供多种 AI 功能
Jun 28, 2024 am 03:51 AM
本站6月27日消息,剪映是由字节跳动旗下脸萌科技开发的一款视频剪辑软件,依托于抖音平台且基本面向该平台用户制作短视频内容,并兼容iOS、安卓、Windows、MacOS等操作系统。剪映官方宣布会员体系升级,推出全新SVIP,包含多种AI黑科技,例如智能翻译、智能划重点、智能包装、数字人合成等。价格方面,剪映SVIP月费79元,年费599元(本站注:折合每月49.9元),连续包月则为59元每月,连续包年为499元每年(折合每月41.6元)。此外,剪映官方还表示,为提升用户体验,向已订阅了原版VIP
 使用Rag和Sem-Rag提供上下文增强AI编码助手
Jun 10, 2024 am 11:08 AM
使用Rag和Sem-Rag提供上下文增强AI编码助手
Jun 10, 2024 am 11:08 AM
通过将检索增强生成和语义记忆纳入AI编码助手,提升开发人员的生产力、效率和准确性。译自EnhancingAICodingAssistantswithContextUsingRAGandSEM-RAG,作者JanakiramMSV。虽然基本AI编程助手自然有帮助,但由于依赖对软件语言和编写软件最常见模式的总体理解,因此常常无法提供最相关和正确的代码建议。这些编码助手生成的代码适合解决他们负责解决的问题,但通常不符合各个团队的编码标准、惯例和风格。这通常会导致需要修改或完善其建议,以便将代码接受到应
 国产最大无人运输机成功首飞:搭载中国航发 AEP100-A 发动机
Aug 23, 2024 am 07:32 AM
国产最大无人运输机成功首飞:搭载中国航发 AEP100-A 发动机
Aug 23, 2024 am 07:32 AM
本站8月22日消息,中国航空发动机集团有限公司今日发文官宣,今日6时28分,由中国航发完全自主研制的900千瓦级涡桨发动机AEP100-A助力SA750U大型无人运输机在陕西成功首飞。据介绍,AEP100-A涡桨发动机由中国航发动研所设计、南方制造,拥有高温高原适应能力,采用三维气动设计和单元体设计技术,在为航空器提供动力的同时,能够提高燃油经济性,提升航空器整体运行效率。AEP100涡桨发动机系列可配装2~6吨级通用飞机或3~10吨级无人机,综合性能达到国际现役同级别先进水平。本站早些时候报道
 微调真的能让LLM学到新东西吗:引入新知识可能让模型产生更多的幻觉
Jun 11, 2024 pm 03:57 PM
微调真的能让LLM学到新东西吗:引入新知识可能让模型产生更多的幻觉
Jun 11, 2024 pm 03:57 PM
大型语言模型(LLM)是在巨大的文本数据库上训练的,在那里它们获得了大量的实际知识。这些知识嵌入到它们的参数中,然后可以在需要时使用。这些模型的知识在训练结束时被“具体化”。在预训练结束时,模型实际上停止学习。对模型进行对齐或进行指令调优,让模型学习如何充分利用这些知识,以及如何更自然地响应用户的问题。但是有时模型知识是不够的,尽管模型可以通过RAG访问外部内容,但通过微调使用模型适应新的领域被认为是有益的。这种微调是使用人工标注者或其他llm创建的输入进行的,模型会遇到额外的实际知识并将其整合
 为大模型提供全新科学复杂问答基准与测评体系,UNSW、阿贡、芝加哥大学等多家机构联合推出SciQAG框架
Jul 25, 2024 am 06:42 AM
为大模型提供全新科学复杂问答基准与测评体系,UNSW、阿贡、芝加哥大学等多家机构联合推出SciQAG框架
Jul 25, 2024 am 06:42 AM
编辑|ScienceAI问答(QA)数据集在推动自然语言处理(NLP)研究发挥着至关重要的作用。高质量QA数据集不仅可以用于微调模型,也可以有效评估大语言模型(LLM)的能力,尤其是针对科学知识的理解和推理能力。尽管当前已有许多科学QA数据集,涵盖了医学、化学、生物等领域,但这些数据集仍存在一些不足。其一,数据形式较为单一,大多数为多项选择题(multiple-choicequestions),它们易于进行评估,但限制了模型的答案选择范围,无法充分测试模型的科学问题解答能力。相比之下,开放式问答
 SOTA性能,厦大多模态蛋白质-配体亲和力预测AI方法,首次结合分子表面信息
Jul 17, 2024 pm 06:37 PM
SOTA性能,厦大多模态蛋白质-配体亲和力预测AI方法,首次结合分子表面信息
Jul 17, 2024 pm 06:37 PM
编辑|KX在药物研发领域,准确有效地预测蛋白质与配体的结合亲和力对于药物筛选和优化至关重要。然而,目前的研究没有考虑到分子表面信息在蛋白质-配体相互作用中的重要作用。基于此,来自厦门大学的研究人员提出了一种新颖的多模态特征提取(MFE)框架,该框架首次结合了蛋白质表面、3D结构和序列的信息,并使用交叉注意机制进行不同模态之间的特征对齐。实验结果表明,该方法在预测蛋白质-配体结合亲和力方面取得了最先进的性能。此外,消融研究证明了该框架内蛋白质表面信息和多模态特征对齐的有效性和必要性。相关研究以「S
 我国首台载重超 3 吨的大型无人运输机'SA750U”成功首飞,全国产系统和材料
Aug 23, 2024 am 07:31 AM
我国首台载重超 3 吨的大型无人运输机'SA750U”成功首飞,全国产系统和材料
Aug 23, 2024 am 07:31 AM
本站8月22日消息,据“山河华宇”官方公众号消息,今日6时28分,由山河华宇航空科技自主研制、山河星航战略协同推进完成的SA750U大型无人运输机从西安靖边爱生无人机试验测试中心成功首飞。▲图源“山河华宇”官方公众号,下同据介绍,在40分钟的飞行测试过程中,飞机各系统设备工作正常、状态良好,飞机姿态平稳,性能符合设计指标,在完成了预定飞行科目后,飞机顺利返航,首飞圆满成功。SA750U是我国第一型载重超3吨的大型无人运输机,山河华宇公司仅用2年零8个月时间,便完成了从概念设计到首架机成功首飞全部
 SK 海力士 8 月 6 日将展示 AI 相关新品:12 层 HBM3E、321-high NAND 等
Aug 01, 2024 pm 09:40 PM
SK 海力士 8 月 6 日将展示 AI 相关新品:12 层 HBM3E、321-high NAND 等
Aug 01, 2024 pm 09:40 PM
本站8月1日消息,SK海力士今天(8月1日)发布博文,宣布将出席8月6日至8日,在美国加利福尼亚州圣克拉拉举行的全球半导体存储器峰会FMS2024,展示诸多新一代产品。未来存储器和存储峰会(FutureMemoryandStorage)简介前身是主要面向NAND供应商的闪存峰会(FlashMemorySummit),在人工智能技术日益受到关注的背景下,今年重新命名为未来存储器和存储峰会(FutureMemoryandStorage),以邀请DRAM和存储供应商等更多参与者。新产品SK海力士去年在
