

PyTorch 并行训练 DistributedDataParallel 完整代码示例

使用大型数据集训练大型深度神经网络 (DNN) 的问题是深度学习领域的主要挑战。 随着 DNN 和数据集规模的增加,训练这些模型的计算和内存需求也会增加。 这使得在计算资源有限的单台机器上训练这些模型变得困难甚至不可能。 使用大型数据集训练大型 DNN 的一些主要挑战包括:
- 训练时间长:训练过程可能需要数周甚至数月才能完成,具体取决于模型的复杂性和数据集的大小。
- 内存限制:大型 DNN 可能需要大量内存来存储训练期间的所有模型参数、梯度和中间激活。 这可能会导致内存不足错误并限制可在单台机器上训练的模型的大小。
为了应对这些挑战,已经开发了各种技术来扩大具有大型数据集的大型 DNN 的训练,包括模型并行性、数据并行性和混合并行性,以及硬件、软件和算法的优化。
在本文中我们将演示使用 PyTorch 的数据并行性和模型并行性。

我们所说的并行性一般是指在多个gpu,或多台机器上训练深度神经网络(dnn),以实现更少的训练时间。数据并行背后的基本思想是将训练数据分成更小的块,让每个GPU或机器处理一个单独的数据块。然后将每个节点的结果组合起来,用于更新模型参数。在数据并行中,模型体系结构在每个节点上是相同的,但模型参数在节点之间进行了分区。每个节点使用分配的数据块训练自己的本地模型,在每次训练迭代结束时,模型参数在所有节点之间同步。这个过程不断重复,直到模型收敛到一个令人满意的结果。
下面我们用用ResNet50和CIFAR10数据集来进行完整的代码示例:
在数据并行中,模型架构在每个节点上保持相同,但模型参数在节点之间进行了分区,每个节点使用分配的数据块训练自己的本地模型。
PyTorch的DistributedDataParallel 库可以进行跨节点的梯度和模型参数的高效通信和同步,实现分布式训练。本文提供了如何使用ResNet50和CIFAR10数据集使用PyTorch实现数据并行的示例,其中代码在多个gpu或机器上运行,每台机器处理训练数据的一个子集。训练过程使用PyTorch的DistributedDataParallel 库进行并行化。
导入必须要的库
import os from datetime import datetime from time import time import argparse import torchvision import torchvision.transforms as transforms import torch import torch.nn as nn import torch.distributed as dist from torch.nn.parallel import DistributedDataParallel
接下来,我们将检查GPU。
import subprocess result = subprocess.run(['nvidia-smi'], stdout=subprocess.PIPE) print(result.stdout.decode())
因为我们需要在多个服务器上运行,所以手动一个一个执行并不现实,所以需要有一个调度程序。这里我们使用SLURM文件来运行代码(slurm面向Linux和Unix类似内核的免费和开源工作调度程序),
def main():
# get distributed configuration from Slurm environment
parser = argparse.ArgumentParser()
parser.add_argument('-b', '--batch-size', default=128, type =int,
help='batch size. it will be divided in mini-batch for each worker')
parser.add_argument('-e','--epochs', default=2, type=int, metavar='N',
help='number of total epochs to run')
parser.add_argument('-c','--checkpoint', default=None, type=str,
help='path to checkpoint to load')
args = parser.parse_args()
rank = int(os.environ['SLURM_PROCID'])
local_rank = int(os.environ['SLURM_LOCALID'])
size = int(os.environ['SLURM_NTASKS'])
master_addr = os.environ["SLURM_SRUN_COMM_HOST"]
port = "29500"
node_id = os.environ['SLURM_NODEID']
ddp_arg = [rank, local_rank, size, master_addr, port, node_id]
train(args, ddp_arg)然后,我们使用DistributedDataParallel 库来执行分布式训练。
def train(args, ddp_arg):
rank, local_rank, size, MASTER_ADDR, port, NODE_ID = ddp_arg
# display info
if rank == 0:
#print(">>> Training on ", len(hostnames), " nodes and ", size, " processes, master node is ", MASTER_ADDR)
print(">>> Training on ", size, " GPUs, master node is ", MASTER_ADDR)
#print("- Process {} corresponds to GPU {} of node {}".format(rank, local_rank, NODE_ID))
print("- Process {} corresponds to GPU {} of node {}".format(rank, local_rank, NODE_ID))
# configure distribution method: define address and port of the master node and initialise communication backend (NCCL)
#dist.init_process_group(backend='nccl', init_method='env://', world_size=size, rank=rank)
dist.init_process_group(
backend='nccl',
init_method='tcp://{}:{}'.format(MASTER_ADDR, port),
world_size=size,
rank=rank
)
# distribute model
torch.cuda.set_device(local_rank)
gpu = torch.device("cuda")
#model = ResNet18(classes=10).to(gpu)
model = torchvision.models.resnet50(pretrained=False).to(gpu)
ddp_model = DistributedDataParallel(model, device_ids=[local_rank])
if args.checkpoint is not None:
map_location = {'cuda:%d' % 0: 'cuda:%d' % local_rank}
ddp_model.load_state_dict(torch.load(args.checkpoint, map_location=map_location))
# distribute batch size (mini-batch)
batch_size = args.batch_size
batch_size_per_gpu = batch_size // size
# define loss function (criterion) and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(ddp_model.parameters(), 1e-4)
transform_train = transforms.Compose([
transforms.RandomCrop(32, padding=4),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
# load data with distributed sampler
#train_dataset = torchvision.datasets.CIFAR10(root='./data',
# train=True,
# transform=transform_train,
# download=False)
# load data with distributed sampler
train_dataset = torchvision.datasets.CIFAR10(root='./data',
train=True,
transform=transform_train,
download=False)
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset,
num_replicas=size,
rank=rank)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size_per_gpu,
shuffle=False,
num_workers=0,
pin_memory=True,
sampler=train_sampler)
# training (timers and display handled by process 0)
if rank == 0: start = datetime.now()
total_step = len(train_loader)
for epoch in range(args.epochs):
if rank == 0: start_dataload = time()
for i, (images, labels) in enumerate(train_loader):
# distribution of images and labels to all GPUs
images = images.to(gpu, non_blocking=True)
labels = labels.to(gpu, non_blocking=True)
if rank == 0: stop_dataload = time()
if rank == 0: start_training = time()
# forward pass
outputs = ddp_model(images)
loss = criterion(outputs, labels)
# backward and optimize
optimizer.zero_grad()
loss.backward()
optimizer.step()
if rank == 0: stop_training = time()
if (i + 1) % 10 == 0 and rank == 0:
print('Epoch [{}/{}], Step [{}/{}], Loss: {:.4f}, Time data load: {:.3f}ms, Time training: {:.3f}ms'.format(epoch + 1, args.epochs,
i + 1, total_step, loss.item(), (stop_dataload - start_dataload)*1000,
(stop_training - start_training)*1000))
if rank == 0: start_dataload = time()
#Save checkpoint at every end of epoch
if rank == 0:
torch.save(ddp_model.state_dict(), './checkpoint/{}GPU_{}epoch.checkpoint'.format(size, epoch+1))
if rank == 0:
print(">>> Training complete in: " + str(datetime.now() - start))
if __name__ == '__main__':
main()代码将数据和模型分割到多个gpu上,并以分布式的方式更新模型。下面是代码的一些解释:
train(args, ddp_arg)有两个参数,args和ddp_arg,其中args是传递给脚本的命令行参数,ddp_arg包含分布式训练相关参数。
rank, local_rank, size, MASTER_ADDR, port, NODE_ID = ddp_arg:解包ddp_arg中分布式训练相关参数。
如果rank为0,则打印当前使用的gpu数量和主节点IP地址信息。
dist.init_process_group(backend='nccl', init_method='tcp://{}:{}'.format(MASTER_ADDR, port), world_size=size, rank=rank) :使用NCCL后端初始化分布式进程组。
torch.cuda.set_device(local_rank):为这个进程选择指定的GPU。
model = torchvision.models. ResNet50 (pretrained=False).to(gpu):从torchvision模型中加载ResNet50模型,并将其移动到指定的gpu。
ddp_model = DistributedDataParallel(model, device_ids=[local_rank]):将模型包装在DistributedDataParallel模块中,也就是说这样我们就可以进行分布式训练了
加载CIFAR-10数据集并应用数据增强转换。
train_sampler=torch.utils.data.distributed.DistributedSampler(train_dataset,num_replicas=size,rank=rank):创建一个DistributedSampler对象,将数据集分割到多个gpu上。
train_loader =torch.utils.data.DataLoader(dataset=train_dataset,batch_size=batch_size_per_gpu,shuffle=False,num_workers=0,pin_memory=True,sampler=train_sampler):创建一个DataLoader对象,数据将批量加载到模型中,这与我们平常训练的步骤是一致的只不过是增加了一个分布式的数据采样DistributedSampler。
为指定的epoch数训练模型,以分布式的方式使用optimizer.step()更新权重。
rank0在每个轮次结束时保存一个检查点。
rank0每10个批次显示损失和训练时间。
结束训练时打印训练模型所花费的总时间也是在rank0上。
代码测试
在使用1个节点1/2/3/4个gpu, 2个节点6/8个gpu,每个节点3/4个gpu上进行了训练Cifar10上的Resnet50的测试如下图所示,每次测试的批处理大小保持不变。完成每项测试所花费的时间以秒为单位记录。随着使用的gpu数量的增加,完成测试所需的时间会减少。当使用8个gpu时,需要320秒才能完成,这是记录中最快的时间。这是肯定的,但是我们可以看到训练的速度并没有像GPU数量增长呈现线性的增长,这可能是因为Resnet50算是一个比较小的模型了,并不需要进行并行化训练。

在多个gpu上使用数据并行可以显著减少在给定数据集上训练深度神经网络(DNN)所需的时间。随着gpu数量的增加,完成训练过程所需的时间减少,这表明DNN可以更有效地并行训练。
这种方法在处理大型数据集或复杂的DNN架构时特别有用。通过利用多个gpu,可以加快训练过程,实现更快的模型迭代和实验。但是需要注意的是,通过Data Parallelism实现的性能提升可能会受到通信开销和GPU内存限制等因素的限制,需要仔细调优才能获得最佳结果。
以上是PyTorch 并行训练 DistributedDataParallel 完整代码示例的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 Python中使用BERT进行情感分析的方法及步骤
Jan 22, 2024 pm 04:24 PM
Python中使用BERT进行情感分析的方法及步骤
Jan 22, 2024 pm 04:24 PM
BERT是由Google在2018年提出的一种预训练的深度学习语言模型。全称为BidirectionalEncoderRepresentationsfromTransformers,它基于Transformer架构,具有双向编码的特点。相比于传统的单向编码模型,BERT在处理文本时能够同时考虑上下文的信息,因此在自然语言处理任务中表现出色。它的双向性使得BERT能够更好地理解句子中的语义关系,从而提高了模型的表达能力。通过预训练和微调的方法,BERT可以用于各种自然语言处理任务,如情感分析、命名
 常用的AI激活函数解析:Sigmoid、Tanh、ReLU和Softmax的深度学习实践
Dec 28, 2023 pm 11:35 PM
常用的AI激活函数解析:Sigmoid、Tanh、ReLU和Softmax的深度学习实践
Dec 28, 2023 pm 11:35 PM
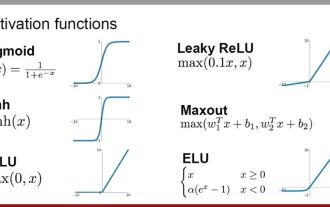
激活函数在深度学习中扮演着至关重要的角色,它们能够为神经网络引入非线性特性,使得网络能够更好地学习和模拟复杂的输入输出关系。正确选择和使用激活函数对于神经网络的性能和训练效果有着重要的影响本文将介绍四种常用的激活函数:Sigmoid、Tanh、ReLU和Softmax,从简介、使用场景、优点、缺点和优化方案五个维度进行探讨,为您提供关于激活函数的全面理解。1、Sigmoid函数SIgmoid函数公式简介:Sigmoid函数是一种常用的非线性函数,可以将任何实数映射到0到1之间。它通常用于将不归一
 超越ORB-SLAM3!SL-SLAM:低光、严重抖动和弱纹理场景全搞定
May 30, 2024 am 09:35 AM
超越ORB-SLAM3!SL-SLAM:低光、严重抖动和弱纹理场景全搞定
May 30, 2024 am 09:35 AM
写在前面今天我们探讨下深度学习技术如何改善在复杂环境中基于视觉的SLAM(同时定位与地图构建)性能。通过将深度特征提取和深度匹配方法相结合,这里介绍了一种多功能的混合视觉SLAM系统,旨在提高在诸如低光条件、动态光照、弱纹理区域和严重抖动等挑战性场景中的适应性。我们的系统支持多种模式,包括拓展单目、立体、单目-惯性以及立体-惯性配置。除此之外,还分析了如何将视觉SLAM与深度学习方法相结合,以启发其他研究。通过在公共数据集和自采样数据上的广泛实验,展示了SL-SLAM在定位精度和跟踪鲁棒性方面优
 潜藏空间嵌入:解释与示范
Jan 22, 2024 pm 05:30 PM
潜藏空间嵌入:解释与示范
Jan 22, 2024 pm 05:30 PM
潜在空间嵌入(LatentSpaceEmbedding)是将高维数据映射到低维空间的过程。在机器学习和深度学习领域中,潜在空间嵌入通常是通过神经网络模型将高维输入数据映射为一组低维向量表示,这组向量通常被称为“潜在向量”或“潜在编码”。潜在空间嵌入的目的是捕捉数据中的重要特征,并将其表示为更简洁和可理解的形式。通过潜在空间嵌入,我们可以在低维空间中对数据进行可视化、分类、聚类等操作,从而更好地理解和利用数据。潜在空间嵌入在许多领域中都有广泛的应用,如图像生成、特征提取、降维等。潜在空间嵌入的主要
 一文搞懂:AI、机器学习与深度学习的联系与区别
Mar 02, 2024 am 11:19 AM
一文搞懂:AI、机器学习与深度学习的联系与区别
Mar 02, 2024 am 11:19 AM
在当今科技日新月异的浪潮中,人工智能(ArtificialIntelligence,AI)、机器学习(MachineLearning,ML)与深度学习(DeepLearning,DL)如同璀璨星辰,引领着信息技术的新浪潮。这三个词汇频繁出现在各种前沿讨论和实际应用中,但对于许多初涉此领域的探索者来说,它们的具体含义及相互之间的内在联系可能仍笼罩着一层神秘面纱。那让我们先来看看这张图。可以看出,深度学习、机器学习和人工智能之间存在着紧密的关联和递进关系。深度学习是机器学习的一个特定领域,而机器学习
 超强!深度学习Top10算法!
Mar 15, 2024 pm 03:46 PM
超强!深度学习Top10算法!
Mar 15, 2024 pm 03:46 PM
自2006年深度学习概念被提出以来,20年快过去了,深度学习作为人工智能领域的一场革命,已经催生了许多具有影响力的算法。那么,你所认为深度学习的top10算法有哪些呢?以下是我心目中深度学习的顶尖算法,它们在创新性、应用价值和影响力方面都占据重要地位。1、深度神经网络(DNN)背景:深度神经网络(DNN)也叫多层感知机,是最普遍的深度学习算法,发明之初由于算力瓶颈而饱受质疑,直到近些年算力、数据的爆发才迎来突破。DNN是一种神经网络模型,它包含多个隐藏层。在该模型中,每一层将输入传递给下一层,并
 从基础到实践,回顾Elasticsearch 向量检索发展史
Oct 23, 2023 pm 05:17 PM
从基础到实践,回顾Elasticsearch 向量检索发展史
Oct 23, 2023 pm 05:17 PM
1.引言向量检索已经成为现代搜索和推荐系统的核心组件。通过将复杂的对象(例如文本、图像或声音)转换为数值向量,并在多维空间中进行相似性搜索,它能够实现高效的查询匹配和推荐。从基础到实践,回顾Elasticsearch向量检索发展史_elasticsearchElasticsearch作为一款流行的开源搜索引擎,其在向量检索方面的发展也一直备受关注。本文将回顾Elasticsearch向量检索的发展历史,重点介绍各个阶段的特点和进展。以史为鉴,方便大家建立起Elasticsearch向量检索的全量
 为大模型提供全新科学复杂问答基准与测评体系,UNSW、阿贡、芝加哥大学等多家机构联合推出SciQAG框架
Jul 25, 2024 am 06:42 AM
为大模型提供全新科学复杂问答基准与测评体系,UNSW、阿贡、芝加哥大学等多家机构联合推出SciQAG框架
Jul 25, 2024 am 06:42 AM
编辑|ScienceAI问答(QA)数据集在推动自然语言处理(NLP)研究发挥着至关重要的作用。高质量QA数据集不仅可以用于微调模型,也可以有效评估大语言模型(LLM)的能力,尤其是针对科学知识的理解和推理能力。尽管当前已有许多科学QA数据集,涵盖了医学、化学、生物等领域,但这些数据集仍存在一些不足。其一,数据形式较为单一,大多数为多项选择题(multiple-choicequestions),它们易于进行评估,但限制了模型的答案选择范围,无法充分测试模型的科学问题解答能力。相比之下,开放式问答
