

ros是linux什么版本

ros是linux发行版本。ROS全称Robot Operating System,译为机器人操作系统;它基于Linux内核,只能在Linux下运行。ROS提供一些标准操作系统服务,例如硬件抽象,底层设备控制,常用功能实现,进程间消息以及数据包管理。ROS可以分成两层,低层是上面描述的操作系统层,高层则是广大用户群贡献的实现不同功能的各种软件包,例如定位绘图、行动规划、感知等。

本教程操作环境:linux7.3系统、Dell G3电脑。
ROS定义介绍
ROS全称Robot Operating System,译为机器人操作系统。基于Linux内核,目前只能在Linux下运行。
ROS设计者将ROS表述为“ROS = Plumbing + Tools + Capabilities + Ecosystem”,即ROS是通讯机制、工具软件包、机器人高层技能以及机器人生态系统的集合体。
顾名思义,ROS是一个系统。它和我们用的普通操作系统类似,ROS将底层的机器人硬件封装起来,也就是说,不同的机器人中包含的各种底层参数,在使用ROS进行开发的人员眼里,都是一样的。这里还要提一下,目前ROS没有一个可视化界面。我们所用的Windows、Linux能直接看到图像界面并操作,是因为它们有一个可视化界面,而ROS没有。我们所谓的操作系统,并不一定是都要有可视化界面才算的,如果有兴趣的可以去看一下最早期的操作系统,只有命令行,并没有绚丽多彩的界面。
ROS提供一些标准操作系统服务,例如硬件抽象,底层设备控制,常用功能实现,进程间消息以及数据包管理。ROS是基于一种图状架构,从而不同节点的进程能接受,发布,聚合各种信息(例如传感,控制,状态,规划等等)。
ROS可以分成两层,低层是上面描述的操作系统层,高层则是广大用户群贡献的实现不同功能的各种软件包,例如定位绘图,行动规划,感知,模拟等等。
ROS是一个多义词,它还可以是一种通讯机制。在ROS开发中,用节点(Node)表示应用程序,一个节点就是一个可执行程序。节点之间就是通过ROS进行通信。ROS通过节点管理器(Master)对各个节点进行管理。至于具体的原理实现等后续再说。
此外,ROS还代表一系列用于机器人开发的工具包、算法、技能、平台、生态等。
ROS的历史。说白了,ROS就是一帮大佬在开发机器人的时候觉得比较好的东西(可以是一些好用的库、软件,也可以是一些思想、协议、标准)汇集在一起后形成的东西。在机器人的开发中,各种各样的机器人没有统一的标准,每次开发一个自己没见过的机器人都需要重新去学习大量的东西,十分的不方便,于是,大佬们借鉴操作系统产生的思想,觉得为什么不可以给机器人也做一套系统来对底层进行封装呢?于是,ROS产生了。经过岁月的打磨,ROS越来越完善,用的人也越来越多了。
如果你要问我ROS是干什么的,那你只需要知道一句话就够了。ROS是用来做机器人或者机器臂开发的。
机器人开发的历史中,标准化的工作还是没有做到位。不同的机器人,所用的系统、程序等等都不一样,这样导致只要跨平台,开发起来就十分的困难。为了解决这样的问题,ROS诞生了。ROS可以通过封装,使得底层硬件对于开发者来说变得透明,大大降低了跨平台开发的难度。
之所以选择ROS,上面说了那么多其实大家也应该明白了,无非就是,用的人多,普及范围广。ROS所包含的领域、资料、功能、内容、知识等十分丰富,不用它你想去自己编库么?
1. ROS的性能特色
在正式学习ROS之前,先介绍ROS的几个特性,即元操作系统、分布式通信机制、松耦合软件框架、丰富的开源功能库等,来帮大家建立一些感性的认识。
ROS是一个机器人领域的元操作系统。也就是说,它并不是真正意义上的操作系统,其底层的任务调度、编译、设备驱动等还是由它的原生操作系统Ubuntu Linux完成。
ROS实际上是运行在Ubuntu Linux上的亚操作系统,或者说软件框架,但提供硬件抽象、函数调用、进程管理这些类似操作系统的功能,也提供用于获取、编译、跨平台的函数和工具。
ROS的核心思想就是将机器人的软件功能做成一个个节点,节点之间通过互相发送消息进行沟通。这些节点可以部署在同一台主机上,也可以部署在不同主机上,甚至还可以部署在互联网上。ROS网络通信机制中的主节点(master)负责对网络中各个节点之间的通信过程进行管理调度,同时提供一个用于配置网络中全局参数的服务。
ROS是松耦合软件框架,利用分布式通信机制实现节点间的进程通信。ROS的软件代码以松耦合方式组织,开发过程灵活,管理维护方便。
ROS具有丰富的开源功能库。ROS是基于BSD(Berkeley Software Distribution,伯克利软件发行)协议的开源软件,允许任何人修改、重用、重发布以及在商业和闭源产品中使用,使用ROS能够快捷地搭建自己的机器人原型。
2. ROS的发行版本
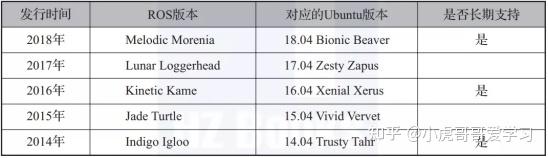
与Linux发行版类似,ROS发行版内置了一系列常用功能包,即将ROS系统打包安装到原生系统中。ROS最初是基于Ubuntu系统开发的,ROS的发行版本名称也和Ubuntu采用了同样的规则,即版本名称由两个相同首字母的英文单词组成,版本首字母按字母表递增顺序选取,图1-1展示了ROS的一些主要版本。

ROS系统架构
安装完ROS后,很多朋友应该迫不及待想立马开始写程序。由于ROS的架构比较复杂,为了后面容易理解遇到的各种概念,这里先讨论一下ROS的系统架构,好让大家对ROS中的各种概念有全面性把控。按照官方的说法,可以分别从计算图、文件系统和开源社区视角来理解ROS架构。
1. 从计算图视角理解ROS架构
ROS中可执行程序的基本单位叫节点(node),节点之间通过消息机制进行通信,这样就组成了一张网状图,也叫计算图,如图1-3所示。
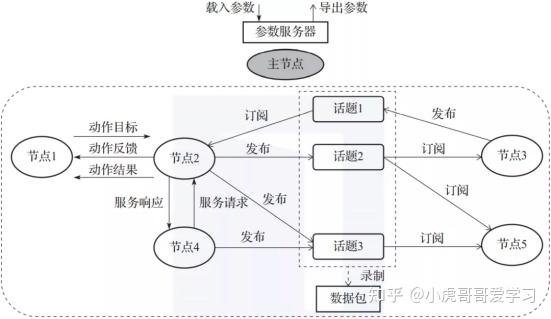

节点是可执行程序,通常也叫进程。ROS功能包中创建的每个可执行程序在被启动加载到系统进程中后,就是一个ROS节点,如图1-3中的节点1、节点2、节点3等。
节点之间通过收发消息进行通信,消息收发机制分为话题(topic)、服务(service)和动作(action)三种,如图1-3中的节点2与节点3、节点2与节点5采用话题通信,节点2与节点4采用服务通信,节点1与节点2采用动作通信。计算图中的节点、话题、服务、动作都要有唯一名称作为标识。
ROS利用节点将代码和功能解耦,提高了系统的容错性和可维护性。所以最好让每个节点都具有特定的单一功能,而不是创建一个包罗万象的庞大节点。如果用C++编写节点,需要用到ROS提供的roscpp库;如果用Python编写节点,需要用到ROS提供的rospy库。
消息是构成计算图的关键,包括消息机制和消息类型两部分。消息机制有话题、服务和动作三种,每种消息机制中传递的数据都具有特定的数据类型(即消息类型),消息类型可分为话题消息类型、服务消息类型和动作消息类型。消息机制和消息类型将在1.5节中展开讲解。
数据包(rosbag)是ROS中专门用来保存和回放话题中数据的文件,可以将一些难以收集的传感器数据用数据包录制下来,然后反复回放来进行算法性能调试。
参数服务器能够为整个ROS网络中的节点提供便于修改的参数。参数可以认为是节点中可供外部修改的全局变量,有静态参数和动态参数。静态参数一般用于在节点启动时设置节点工作模式;动态参数可以用于在节点运行时动态配置节点或改变节点工作状态,比如电机控制节点里的PID控制参数。
主节点负责各个节点之间通信过程的调度管理。因此主节点必须要最先启动,可以通过roscore命令启动。
2. 从文件系统视角理解ROS架构
ROS程序的不同组件要放在不同的文件夹中,这些文件夹根据不同的功能对文件进行组织,这就是ROS的文件系统结构,如图1-4所示。
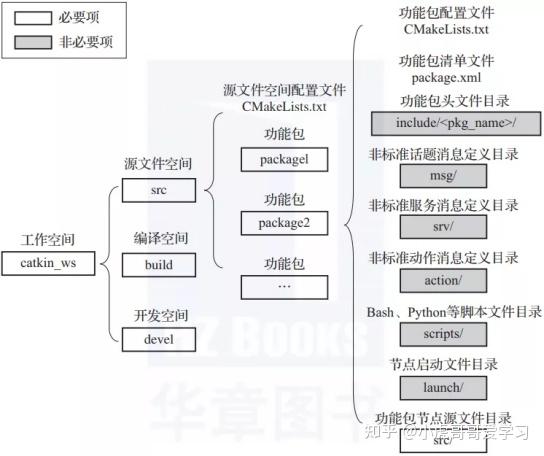

工作空间是一个包含功能包、编译包和编译后可执行文件的文件夹,用户可以根据自己的需要创建多个工作空间,在每个工作空间中开发不同用途的功能包。在图1-4中,我们创建了一个名为catkin_ws的工作空间,其中包含src、build和devel三个文件夹。
- src文件夹放置各个功能包和配置功能包的CMake配置文件CMakeLists.txt。这里说明一下,由于ROS中的源码采用catkin工具进行编译,而catkin工具又基于CMake技术,所以我们在src源文件空间和各个功能包中都会见到一个CMake配置文件CMakeLists.txt,这个文件起到配置编译的作用。
- build文件夹放置编译CMake和catkin功能包时产生的缓存、配置、中间文件等。
- devel文件夹放置编译好的可执行程序,这些可执行程序是不需要安装就能直接运行的。一旦功能包源码编译和测试通过后,可以将这些编译好的可执行文件直接导出与其他开发人员分享。
功能包是ROS中软件组织的基本形式,具有创建ROS程序的最小结构和最少内容,它包含ROS节点源码、脚本、配置文件等。
i. CMakeLists.txt是功能包配置文件,用于编译Cmake功能包编译时的编译配置。
ii. package.xml是功能包清单文件,用xml的标签格式标记该功能包的各类相关信息,比如包的名称、开发者信息、依赖关系等,主要是为了使功能包的安装和分发更容易。
iii. include/
iv. msg、srv和action这三个文件夹分别用于存放非标准话题消息、服务消息和动作消息的定义文件。ROS支持用户自定义消息通信过程中使用的消息类型。这些自定义消息不是必要的,比如程序只使用标准消息类型。
v. scripts目录存放Bash、Python等脚本文件,为非必要项。
vi. launch目录存放节点的启动文件,*.launch文件用于启动一个或多个节点,在含有多个节点的大型项目中很有用,为非必要项。
vii. src目录存放功能包节点所对应的源代码,一个功能包中可以有多个节点程序来完成不同的功能,每个节点程序都可以单独运行。这里src目录存放的是这些节点程序的源代码,你可以按需创建文件夹和文件来组织源代码,源代码可以用C++、Python等编写。
3. 从开源社区视角理解ROS架构
ROS是开源软件,各个独立的网络社区分享和贡献软件及教程,形成了强大的ROS开源社区,如图1-5所示。
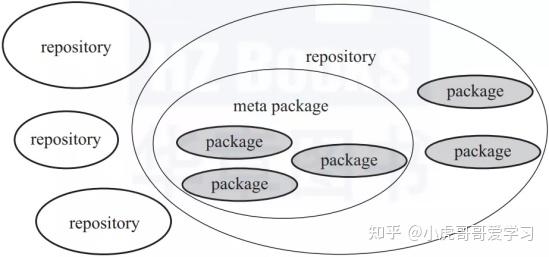

ROS的发展依赖于开源和共享的软件,这些代码由不同的机构共享和发布,比如GitHub源码共享、Ubuntu软件仓库发布、第三方库等。ROS的官方wiki是重要的文档讨论社区,在里面可以很方便地发布与修改相应的文档页面。ROS的answer主页里有大量ROS开发者的提问和回答,对ROS开发中遇到的各种问题的讨论很活跃。
相关推荐:《Linux视频教程》
以上是ros是linux什么版本的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 deepseek网页版入口 deepseek官网入口
Feb 19, 2025 pm 04:54 PM
deepseek网页版入口 deepseek官网入口
Feb 19, 2025 pm 04:54 PM
DeepSeek 是一款强大的智能搜索与分析工具,提供网页版和官网两种访问方式。网页版便捷高效,免安装即可使用;官网则提供全面产品信息、下载资源和支持服务。无论个人还是企业用户,都可以通过 DeepSeek 轻松获取和分析海量数据,提升工作效率、辅助决策和促进创新。
 deepseek怎么安装
Feb 19, 2025 pm 05:48 PM
deepseek怎么安装
Feb 19, 2025 pm 05:48 PM
DeepSeek的安装方法有多种,包括:从源码编译(适用于经验丰富的开发者)使用预编译包(适用于Windows用户)使用Docker容器(最便捷,无需担心兼容性)无论选择哪种方法,请仔细阅读官方文档并充分准备,避免不必要的麻烦。
 gate.io安装包免费拿
Feb 21, 2025 pm 08:21 PM
gate.io安装包免费拿
Feb 21, 2025 pm 08:21 PM
Gate.io是一款受欢迎的加密货币交易所,用户可通过下载其安装包并安装在设备上使用。获取安装包步骤如下:访问Gate.io官方网站,点击“下载”,选择对应操作系统(Windows、Mac或Linux),将安装包下载至计算机。安装过程中建议暂时禁用杀毒软件或防火墙,确保安装顺利。完成后,用户需创建Gate.io账户以开始使用。
 欧易okx安装包直接进
Feb 21, 2025 pm 08:00 PM
欧易okx安装包直接进
Feb 21, 2025 pm 08:00 PM
欧易 OKX,全球领先的数字资产交易所,现推出官方安装包,提供安全便捷的交易体验。欧易 OKX 安装包无需通过浏览器访问,可直接在设备上安装独立应用程序,为用户打造稳定高效的交易平台。安装过程简便易懂,用户只需下载最新版本安装包,按照提示一步步操作即可完成安装。
 BITGet官方网站安装(2025新手指南)
Feb 21, 2025 pm 08:42 PM
BITGet官方网站安装(2025新手指南)
Feb 21, 2025 pm 08:42 PM
BITGet 是一款加密货币交易所,提供各种交易服务,包括现货交易、合约交易和衍生品。该交易所成立于 2018 年,总部位于新加坡,致力于为用户提供安全可靠的交易平台。BITGet 提供多种交易对,包括 BTC/USDT、ETH/USDT 和 XRP/USDT。此外,该交易所还在安全性和流动性方面享有盛誉,并提供多种功能,如高级订单类型、杠杆交易和 24/7 全天候客户支持。
 如何解决Linux终端中查看Python版本时遇到的权限问题?
Apr 01, 2025 pm 05:09 PM
如何解决Linux终端中查看Python版本时遇到的权限问题?
Apr 01, 2025 pm 05:09 PM
Linux终端中查看Python版本时遇到权限问题的解决方法当你在Linux终端中尝试查看Python的版本时,输入python...
 欧易交易所下载官方入口
Feb 21, 2025 pm 07:51 PM
欧易交易所下载官方入口
Feb 21, 2025 pm 07:51 PM
欧易,又称OKX,是一个全球领先的加密货币交易平台。文章提供了欧易官方安装包的下载入口,方便用户在不同设备上安装欧易客户端。该安装包支持 Windows、Mac、Android 和 iOS 系统,用户可根据自己的设备类型选择相应版本下载。安装完成后,用户即可注册或登录欧易账户,开始交易加密货币和享受平台提供的其他服务。
 如何在系统重启后自动设置unixsocket的权限?
Mar 31, 2025 pm 11:54 PM
如何在系统重启后自动设置unixsocket的权限?
Mar 31, 2025 pm 11:54 PM
如何在系统重启后自动设置unixsocket的权限每次系统重启后,我们都需要执行以下命令来修改unixsocket的权限:sudo...
