

重要的制造业趋势:智能机器人需要具备四种能力

智能机器人是智能产品的典型代表。智能机器人至少要具备以下三个要素:一是感知要素,用来认识周围环境状态;二是运动要素,对外界做出反应性动作;三是思考要素,根据感知要素所得到的信息,思考采用什么样的动作。
人们通常把机器人划分为三代。第一代是可编程机器人,这种机器人一般可以根据操作人员所编的程序,完成一些简单的重复性操作。这一代机器人是从20世纪60年代后半叶开始投入使用的,目前在工业界已得到广泛应用。
第二代是感知机器人,又叫作自适应机器人,它是在第一代机器人的基础上发展起来的,具有不同程度的感知周围环境的能力。
第三代机器人具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化地结合起来,因此能在非特定的环境下作业,被称为智能机器人。
智能机器人与工业机器人的根本区别在于,智能机器人具有感知、识别、判断及规划功能,因此机器的智能又可分为两个层次,一是具有感知、识别、理解和判断功能,二是具有总结经验和学习的功能。
智能机器人由于用途不同,系统结构和功能也千差万别,这里仅就工业应用的机器人的基本结构和智能特征做介绍。图2.3是智能机器人的基本构成。
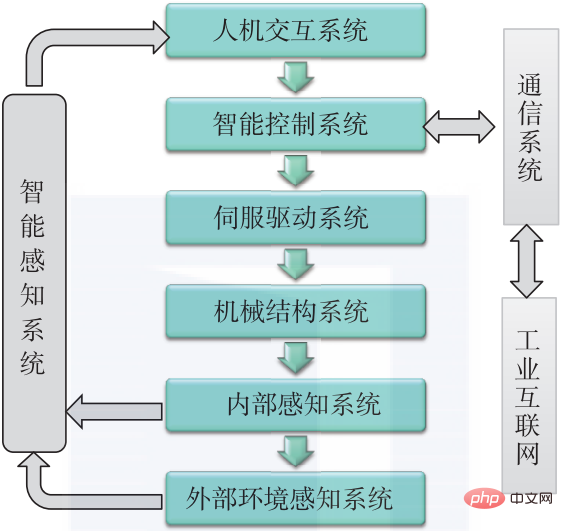
▲图2.3 智能机器人的基本构成
1.环境感知能力
智能机器人最显著的智能特征是对外和对内的感知能力。
外部环境感知能力由外部感知系统实现,该系统由一系列外部传感器(包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等)进行传感信息处理、实现控制与操作。这些传感器包括碰撞传感器、远红外传感器、光敏传感器、麦克风、光电编码器、热释电传感器、超声传感器、连续测距红外传感器、数字指南针、温度传感器等。
内部感知系统由一系列用来检测机器人本身状态的传感器构成,可实时监测机器人各运动部件的各个坐标的位置、速度、加速度、压力和轨迹等,并监测各个部件的受力、平衡、温度等。
由外部环境感知系统和内部感知系统获得的信息组成智能感知系统。该系统中使用的传感器种类和数量越来越多,每种传感器都有一定的使用条件和感知范围,并且又能给出环境或对象的部分或整个侧面的信息,为了有效地利用这些传感器信息,需要采用某种形式对传感器信息进行综合或融合处理,不同类型信息的多种形式的处理系统就是传感器融合。
传感器的融合技术涉及神经网络、知识工程、模糊理论等在信息、检测和控制领域的新理论和新方法。
2.控制能力
智能机器人的系统控制能力由智能控制系统实现,该系统的任务是根据机器人的作业指令程序以及从内外部传感器反馈回来的信号,经过知识库和专家系统辨识并应用不同的算法分析和决策,进而发出控制指令,支配机器人去完成规定的运动和功能。
如果机器人不具备信息反馈特征,则该机器人的控制系统为开环控制系统,反之则为闭环控制系统。根据控制原理,控制系统又可分为程序控制系统、适应性控制系统和人工智能控制系统,而根据控制运动的形式,控制系统可分为点位控制系统和连续轨迹控制系统。
如何分析处理这些信息并做出正确的控制决策,需要专家系统的支持。专家系统解释从传感器采集到的数据,推导出机器人状态描述,从给定的状态推导并预测可能出现的结果,通过运行状态的评价,诊断出系统可能出现的故障。
按照系统设计的目标和约束条件,规划设计出一系列的行动,监测所得的结果与计划的差异,提出维护系统正确运行的方法。人工智能系统与传统控制方法相结合,形成整个闭环控制过程,这需要大量的知识、规则、算法、模式识别等技术的支持。
3.学习能力
随着对智能机器人的要求不断提高,机器人所面临的环境通常无法预知,非结构化环境成为主流。在动态多变的复杂环境中,机器人如果要完成复杂的任务,其学习能力就显得极为重要了。
在这种情况下,机器人应当根据所面临的外部环境和任务通过学习不断地调节自身,在与环境交互的过程中抽取有用的信息,使之逐渐认识和适应环境。通过学习可以不断提高机器人的智能水平,使其能够应对一些意想不到的情况,从而弥补设计人员在设计过程中造成的可能存在的不足。
因此,学习能力是机器人应该具备的重要能力之一,它为处于复杂多变环境下的机器人在环境理解规划与决策等方面提供了有效保障,从而改善整个机器人系统的运行效率。
4.接入工业互联网的能力
智能机器人和所有智能产品一样,未来都要成为工业互联网的一个终端,因此智能机器人要具备接入工业互联网的能力。
用信息物理融合系统(CPS)的原理构建通信模块,对内与智能控制系统集成,采集机器人的所有运行状态;对外通过标准现场总线和以太网卡接入互联网,实现机器人之间,机器人与物流系统之间、其他应用系统之间的集成,实现物理世界与信息世界之间的集成。
智能物联系统打破传统物理世界和信息系统的界限,将数据变成及时而有用的信息,让用户充分享用虚拟和现实世界的各种资源。
本文摘编自《智能制造:AI落地制造业之道》(ISBN:978-7-111-69931-6),经出版方授权发布。
以上是重要的制造业趋势:智能机器人需要具备四种能力的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 centos关机命令行
Apr 14, 2025 pm 09:12 PM
centos关机命令行
Apr 14, 2025 pm 09:12 PM
CentOS 关机命令为 shutdown,语法为 shutdown [选项] 时间 [信息]。选项包括:-h 立即停止系统;-P 关机后关电源;-r 重新启动;-t 等待时间。时间可指定为立即 (now)、分钟数 ( minutes) 或特定时间 (hh:mm)。可添加信息在系统消息中显示。
 CentOS上GitLab的备份方法有哪些
Apr 14, 2025 pm 05:33 PM
CentOS上GitLab的备份方法有哪些
Apr 14, 2025 pm 05:33 PM
CentOS系统下GitLab的备份与恢复策略为了保障数据安全和可恢复性,CentOS上的GitLab提供了多种备份方法。本文将详细介绍几种常见的备份方法、配置参数以及恢复流程,帮助您建立完善的GitLab备份与恢复策略。一、手动备份利用gitlab-rakegitlab:backup:create命令即可执行手动备份。此命令会备份GitLab仓库、数据库、用户、用户组、密钥和权限等关键信息。默认备份文件存储于/var/opt/gitlab/backups目录,您可通过修改/etc/gitlab
 如何检查CentOS HDFS配置
Apr 14, 2025 pm 07:21 PM
如何检查CentOS HDFS配置
Apr 14, 2025 pm 07:21 PM
检查CentOS系统中HDFS配置的完整指南本文将指导您如何有效地检查CentOS系统上HDFS的配置和运行状态。以下步骤将帮助您全面了解HDFS的设置和运行情况。验证Hadoop环境变量:首先,确认Hadoop环境变量已正确设置。在终端执行以下命令,验证Hadoop是否已正确安装并配置:hadoopversion检查HDFS配置文件:HDFS的核心配置文件位于/etc/hadoop/conf/目录下,其中core-site.xml和hdfs-site.xml至关重要。使用
 CentOS上Zookeeper性能调优有哪些方法
Apr 14, 2025 pm 03:18 PM
CentOS上Zookeeper性能调优有哪些方法
Apr 14, 2025 pm 03:18 PM
在CentOS上对Zookeeper进行性能调优,可以从多个方面入手,包括硬件配置、操作系统优化、配置参数调整以及监控与维护等。以下是一些具体的调优方法:硬件配置建议使用SSD硬盘:由于Zookeeper的数据写入磁盘,强烈建议使用SSD以提高I/O性能。足够的内存:为Zookeeper分配足够的内存资源,避免频繁的磁盘读写。多核CPU:使用多核CPU,确保Zookeeper可以并行处理请
 CentOS上PyTorch的GPU支持情况如何
Apr 14, 2025 pm 06:48 PM
CentOS上PyTorch的GPU支持情况如何
Apr 14, 2025 pm 06:48 PM
在CentOS系统上启用PyTorchGPU加速,需要安装CUDA、cuDNN以及PyTorch的GPU版本。以下步骤将引导您完成这一过程:CUDA和cuDNN安装确定CUDA版本兼容性:使用nvidia-smi命令查看您的NVIDIA显卡支持的CUDA版本。例如,您的MX450显卡可能支持CUDA11.1或更高版本。下载并安装CUDAToolkit:访问NVIDIACUDAToolkit官网,根据您显卡支持的最高CUDA版本下载并安装相应的版本。安装cuDNN库:前
 docker原理详解
Apr 14, 2025 pm 11:57 PM
docker原理详解
Apr 14, 2025 pm 11:57 PM
Docker利用Linux内核特性,提供高效、隔离的应用运行环境。其工作原理如下:1. 镜像作为只读模板,包含运行应用所需的一切;2. 联合文件系统(UnionFS)层叠多个文件系统,只存储差异部分,节省空间并加快速度;3. 守护进程管理镜像和容器,客户端用于交互;4. Namespaces和cgroups实现容器隔离和资源限制;5. 多种网络模式支持容器互联。理解这些核心概念,才能更好地利用Docker。
 centos安装mysql
Apr 14, 2025 pm 08:09 PM
centos安装mysql
Apr 14, 2025 pm 08:09 PM
在 CentOS 上安装 MySQL 涉及以下步骤:添加合适的 MySQL yum 源。执行 yum install mysql-server 命令以安装 MySQL 服务器。使用 mysql_secure_installation 命令进行安全设置,例如设置 root 用户密码。根据需要自定义 MySQL 配置文件。调整 MySQL 参数和优化数据库以提升性能。
 centos8重启ssh
Apr 14, 2025 pm 09:00 PM
centos8重启ssh
Apr 14, 2025 pm 09:00 PM
重启 SSH 服务的命令为:systemctl restart sshd。步骤详解:1. 访问终端并连接到服务器;2. 输入命令:systemctl restart sshd;3. 验证服务状态:systemctl status sshd。
