

怎么使用Python点云生成3D网格

1、介绍
点云是具有 3 轴坐标(x, y, z)的点的集合。这种类型的集合可以来自不同的来源并以不同的格式保存。可以使用称为表面重建算法的不同算法将点云转换为 3D 网格。为了执行表面重建,本指南使用PyVista,这是一个易于使用的库来处理 3D 数据。
要从 PyPI 安装最新版本的 PyVista,请使用:
pip install pyvistaa
2、程序
生成网格的代码非常短。你只需要提供一个N × 3形状的 NumPy 数组,其中N是点的数量,三列是每个点的x位置、y位置和z位置。该过程中最具挑战性的部分是获取感兴趣对象的点云,因为一旦有了它,生成网格的完整代码就非常短:
import numpy as np import pyvista as pv # NumPy array with shape (n_points, 3) points = np.genfromtxt('points.csv', delimiter=",", dtype=np.float32) point_cloud = pv.PolyData(points) mesh = point_cloud.reconstruct_surface() mesh.save('mesh.stl')
在此示例中,点云是从以下格式的 CSV 文件中提取的:
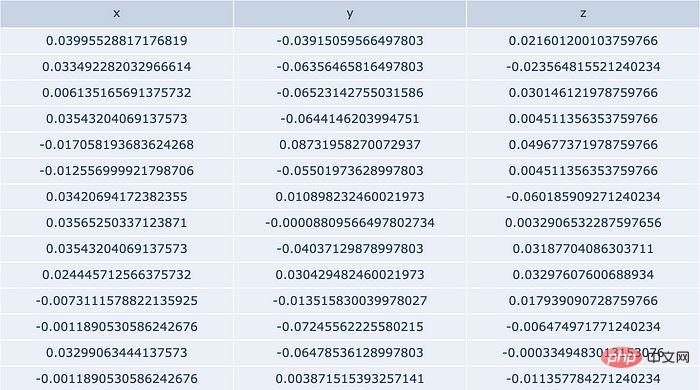
不管你的观点来自哪里,重要的是pv.PolyData(points)按照上面提到的格式向方法传递一个 NumPy 数组。
如果你想可视化点云使用:
point_cloud.plot(eye_dome_lighting= True )
Eye Dome 照明是一种着色技术,可在可视化点云时改善深度感知。
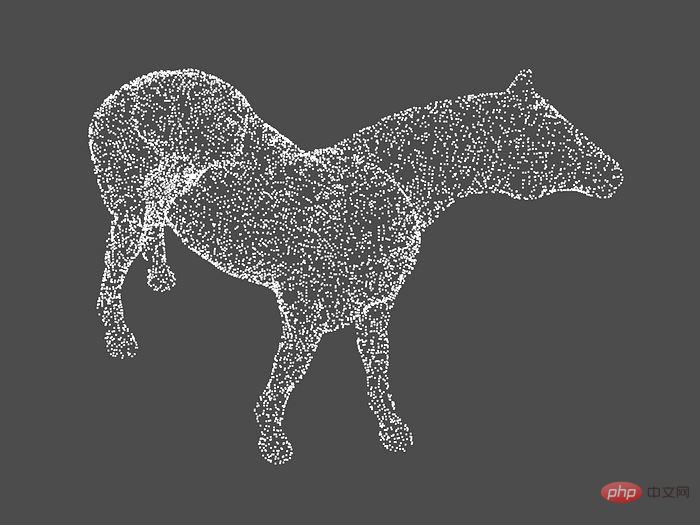
点云可视化的示例。来自PyVista 示例的源文件。
如果您想可视化生成的网格,请使用:
mesh.plot(color='orange')
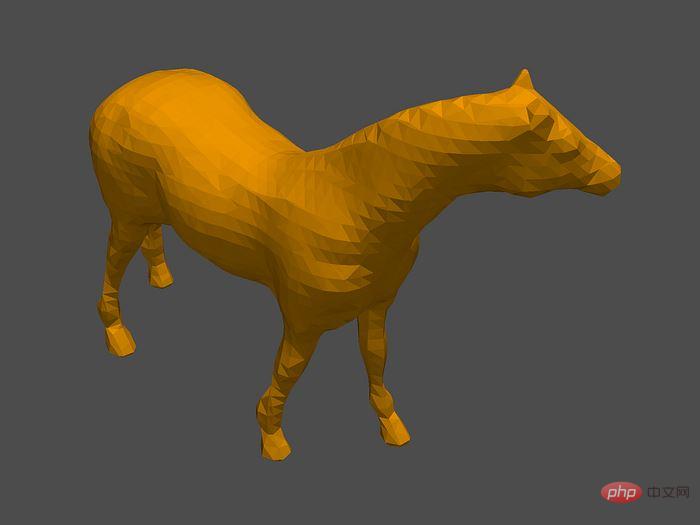
网格可视化的示例。来自PyVista 示例的源文件。
以上是怎么使用Python点云生成3D网格的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 PHP和Python:解释了不同的范例
Apr 18, 2025 am 12:26 AM
PHP和Python:解释了不同的范例
Apr 18, 2025 am 12:26 AM
PHP主要是过程式编程,但也支持面向对象编程(OOP);Python支持多种范式,包括OOP、函数式和过程式编程。PHP适合web开发,Python适用于多种应用,如数据分析和机器学习。
 在PHP和Python之间进行选择:指南
Apr 18, 2025 am 12:24 AM
在PHP和Python之间进行选择:指南
Apr 18, 2025 am 12:24 AM
PHP适合网页开发和快速原型开发,Python适用于数据科学和机器学习。1.PHP用于动态网页开发,语法简单,适合快速开发。2.Python语法简洁,适用于多领域,库生态系统强大。
 Python vs. JavaScript:学习曲线和易用性
Apr 16, 2025 am 12:12 AM
Python vs. JavaScript:学习曲线和易用性
Apr 16, 2025 am 12:12 AM
Python更适合初学者,学习曲线平缓,语法简洁;JavaScript适合前端开发,学习曲线较陡,语法灵活。1.Python语法直观,适用于数据科学和后端开发。2.JavaScript灵活,广泛用于前端和服务器端编程。
 vs code 可以在 Windows 8 中运行吗
Apr 15, 2025 pm 07:24 PM
vs code 可以在 Windows 8 中运行吗
Apr 15, 2025 pm 07:24 PM
VS Code可以在Windows 8上运行,但体验可能不佳。首先确保系统已更新到最新补丁,然后下载与系统架构匹配的VS Code安装包,按照提示安装。安装后,注意某些扩展程序可能与Windows 8不兼容,需要寻找替代扩展或在虚拟机中使用更新的Windows系统。安装必要的扩展,检查是否正常工作。尽管VS Code在Windows 8上可行,但建议升级到更新的Windows系统以获得更好的开发体验和安全保障。
 visual studio code 可以用于 python 吗
Apr 15, 2025 pm 08:18 PM
visual studio code 可以用于 python 吗
Apr 15, 2025 pm 08:18 PM
VS Code 可用于编写 Python,并提供许多功能,使其成为开发 Python 应用程序的理想工具。它允许用户:安装 Python 扩展,以获得代码补全、语法高亮和调试等功能。使用调试器逐步跟踪代码,查找和修复错误。集成 Git,进行版本控制。使用代码格式化工具,保持代码一致性。使用 Linting 工具,提前发现潜在问题。
 PHP和Python:深入了解他们的历史
Apr 18, 2025 am 12:25 AM
PHP和Python:深入了解他们的历史
Apr 18, 2025 am 12:25 AM
PHP起源于1994年,由RasmusLerdorf开发,最初用于跟踪网站访问者,逐渐演变为服务器端脚本语言,广泛应用于网页开发。Python由GuidovanRossum于1980年代末开发,1991年首次发布,强调代码可读性和简洁性,适用于科学计算、数据分析等领域。
 vscode怎么在终端运行程序
Apr 15, 2025 pm 06:42 PM
vscode怎么在终端运行程序
Apr 15, 2025 pm 06:42 PM
在 VS Code 中,可以通过以下步骤在终端运行程序:准备代码和打开集成终端确保代码目录与终端工作目录一致根据编程语言选择运行命令(如 Python 的 python your_file_name.py)检查是否成功运行并解决错误利用调试器提升调试效率
 vscode 扩展是否是恶意的
Apr 15, 2025 pm 07:57 PM
vscode 扩展是否是恶意的
Apr 15, 2025 pm 07:57 PM
VS Code 扩展存在恶意风险,例如隐藏恶意代码、利用漏洞、伪装成合法扩展。识别恶意扩展的方法包括:检查发布者、阅读评论、检查代码、谨慎安装。安全措施还包括:安全意识、良好习惯、定期更新和杀毒软件。
