

19岁辍学创业,两年价值20亿美元!小扎元宇宙野心曾由他来支撑

19岁辍学创业,2年内就被Facebook以20亿美元巨额收购,24岁那年,他已名列福布斯40岁以下最富有企业家的第22位。
是的,我们说的是Oculus VR的创始人Palmer Luckey。
大学辍学——创办公司——走上人生巅峰……
这既视感,此处手动@乔布斯。
酷爱实验的怪小孩
Luckey出生于美国加州长滩,和三个妹妹一起长大,母亲在家全职照顾他,包括他的学业和生活。
Luckey从小就和其他小孩不一样。
他喜欢摆弄各种小玩意和新奇的实验,在自家的车库里他尝试了各种复杂的电子实验,包括「轨道炮、特斯拉线圈和激光」。

父亲是个汽车经销商,他允许儿子将家庭车库的一半用于他的各种「实验」。
他在家由母亲辅导完成了最初的学业,从小他就对电子和工程领域产生了兴趣,并通过在线课程自学一些基本的编程语言。
他很早便展现了对虚拟现实概念的独特想法,「我喜欢计算机给我带来的体验,但我希望这种沉浸感能再真实一些」。
在接受Insider采访上,他说:
VR在80、90年代就已经开始流行了,当时很多人都承诺它即将到来,但很多想法都没能成功,也就是技术还没有准备好。即使他们做的每一件事都很完美,他们也不可能做出让消费者满意的VR设备。我们需要做的是制造出低成本和高性能的VR设备。
从2009年开始,也就是他16岁那年,他开始自己设计制作VR头戴设备。

当时市场上的VR头显存在明显短板,包括低对比度、高延迟、低视野、极端体积重量等问题,简单来说就是块头大还不好用。
2010年,他在父母的车库里完成了他的第一个原型机PR1,对这些问题进行了部分改良,它具有90度视野、低延迟和内置触觉反馈。
之后Luckey陆续开发了一系列原型机,探索3D立体视觉、无线和极端270度视野等功能,同时还减小了系统的尺寸和重量。
最终,他单人制造了50多个头戴式显示器。
2009年,他和朋友一起创办了ModRetro论坛,这是一个「便携化」在线社区,聚集了一群计算机、电子设备、复古游戏的发烧友。
后来他就读于加州州立大学长滩分校,主修新闻学,并担任Daily49er的在线编辑。

在此期间,他还在南加州大学创意技术研究所(ICT)的混合现实实验室(MxR)担任兼职工程师,作为具有成本效益的虚拟现实系统设计团队的BRAVEMIND中的一员,其下属于美国陆军研究实验室。

这段经历也为他之后创立Anduril Industries,一家专注于军事应用的自主无人机和传感器的国防技术公司埋下了伏笔。
22岁时,Palmer Luckey甚至还登上了《时代杂志》的封面。

与传奇游戏设计师John Carmack的相遇
2011年,传奇的游戏设计师John Carmack脑中正酝酿着一个关于3D视觉体验的想法,于是他想到了VR。
Carmack想要将他们的大作Doom 3: BFG Edition以VR的形式向公众展示,但当时市面上最好的头戴式显示器(HMD)也因为高延迟、低视野(视野覆盖率最高只有40度)等问题,无法满足他的设想。
在一篇题为「LEEP on the Cheap」的文章评论部分,Carmack找到了一个正从事VR相关的研究的人,他就是「PalmerTech」——Palmer Luckey的网名。
他立即写信给这位名叫PalmerTech的人,询问他VR原型机情况。
2013年5月,Carmack收到了Oculus Rift的原型机,这天他还特意发推称赞Luckey的作品。
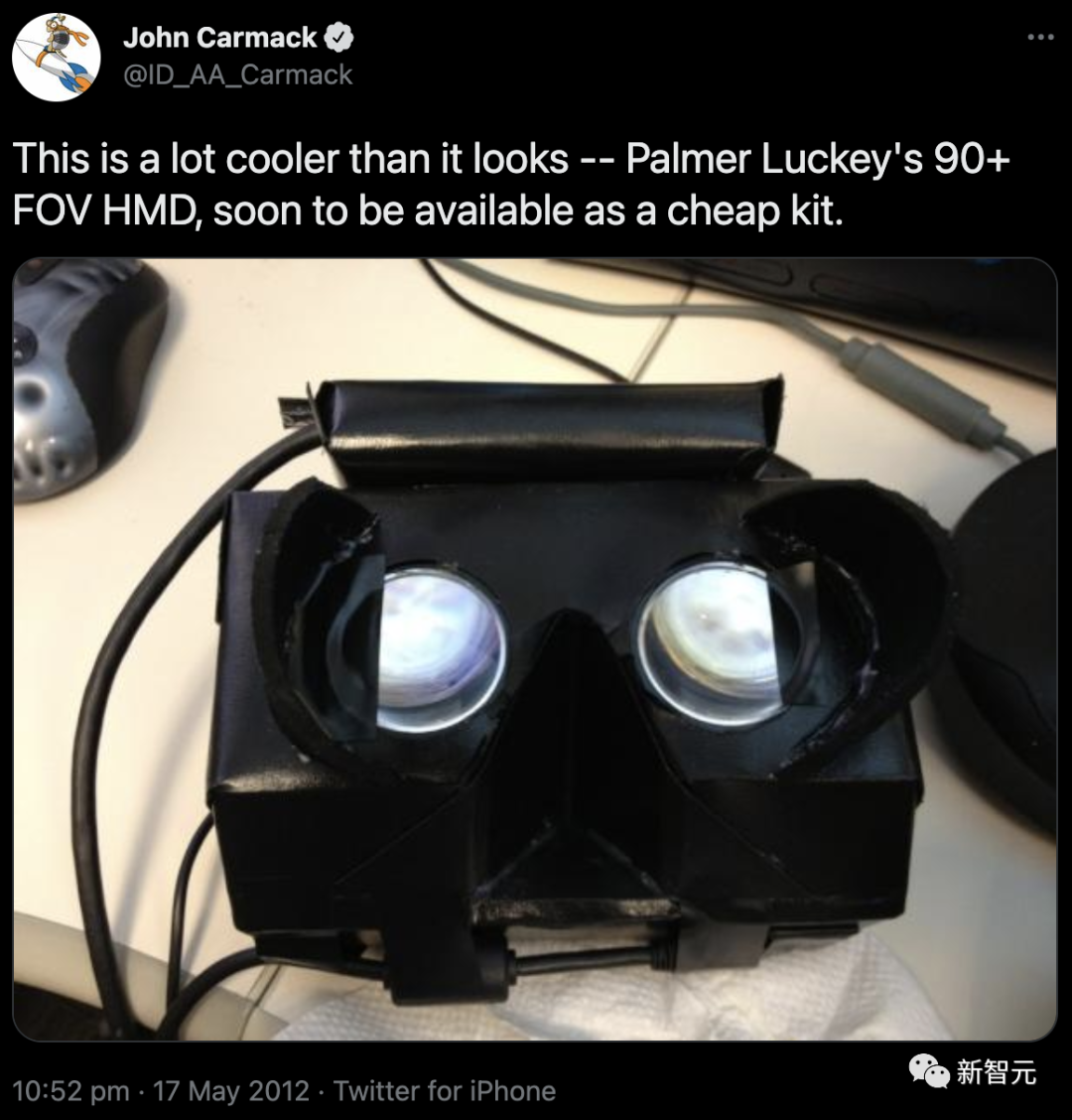
除了这条推文,John Carmack还分享了一些对Luckey原型机的广泛评论。
在Carmack的帮助下,一些行业资深人士,如Valve工程师Dan Newell和Sony高级总监Mick Hocking也预购了一些Oculus Rift原型机。
Carmack在2012年电子娱乐博览会上使用它演示了id Software的《毁灭战士3:BFG版》。
从这之后,Oculus Rift开始进入了大众视野,Luckey也因此从大学辍学,全职专注于Oculus的研发。
与Brendan Iribe共同创办Oculus
Oculus Rift出名之后,他收到了第一份来自Sony的offer。
这是一份索尼欧洲计算机部门的全职岗位,全权管理索尼的研发实验室,年薪7万美元。
他面临一个艰难的选择,是加入Sony的高薪团队,还是坚持完成自己的Oculus项目。
这时,Brendan Iribe成为了恰当的时机里出现的那个贵人。

Iribe接到了朋友的电话,想给他介绍一个虚拟现实有关的项目。
他起初对VR理念持怀疑态度,但由于John Carmack的名头,他还是决定给他一个机会。
但当他看到Luckey的产品和他关于虚拟现实的一些构想时,他开始对这个项目产生了浓厚的兴趣。
在和Luckey第一次见面之后,他突然有了一个想法,这个想法将改变Luckey的职业生涯。

当时的他还在认真考虑索尼的offer,Iribe说的一句话打动了他:
「没有人能比你更熟悉你自己的产品」。
在与Iribe的团队交谈后,Luckey更加确信他应该保持独立,并围绕他的硬件建立一个软件生态系统。
Luckey告诉Iribe,以前他的计划是在Kickstarter上发起活动,并出售成套设备。但现在他已经收到了许多公司的邀请,希望他加入这些公司。
几个月后,Brendan Iribe成功说服了Palmer Luckey和他一起创办了Oculus。
游戏行业的其他大佬,如Mark Bolas和David Helgason,也在Kickstarter视频中对Palmer Luckey的VR项目表示支持。
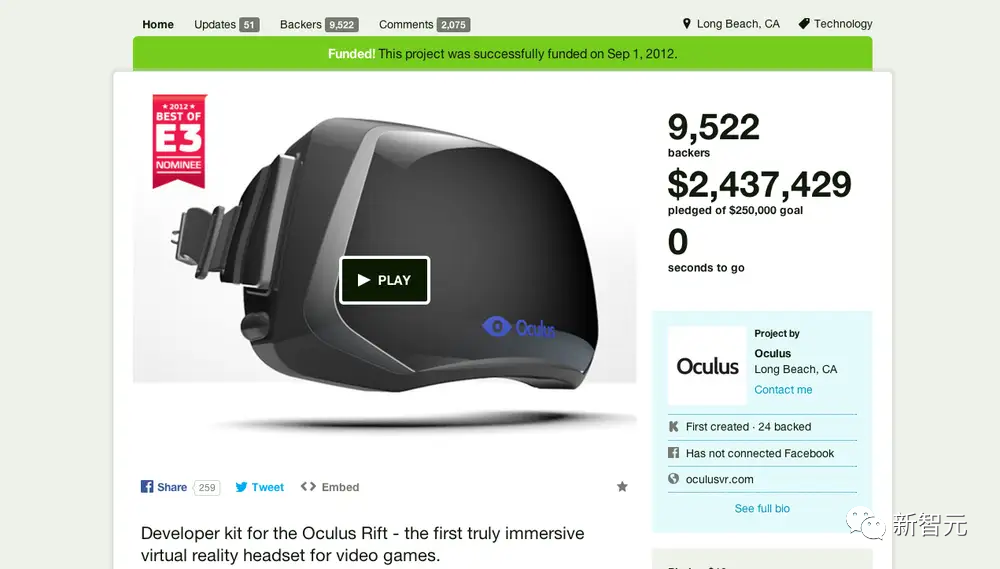
在Kickstarter活动期间,Luckey向所有游戏爱好者和VR粉丝们介绍了Oculus Rift,为这个初创公司赢得了梦幻的曝光率。
Kickstarter 活动对整个 Oculus 团队来说取得了巨大的成功。
Oculus共筹集了240万美元,比Palmer Luckey预期的25万美元翻了十倍。
这个来自南加州的小男孩的VR梦开始扬帆起航。
扎克伯格的登场
在解决了晕动症的问题后,Oculus从Marc Andreessen和他的合伙人那里拿下了总共7500万美元的融资。
而这位Marc Andreessen,正是将Brendan Iribe介绍给马克·扎克伯格的人。
在一通电话之后,Iribe就把Oculus拿到了Facebook进行演示。
当时,在场的所有人都被Oculus的体验震惊了,据说他们的嘴里只蹦出了一句话——我勒个去!(Holy Crap)
而扎克伯格本人也非常激动。
五天后,他便亲自来到尔湾与Oculus团队见面。于是,Palmer Luckey也第一次见到了小扎。
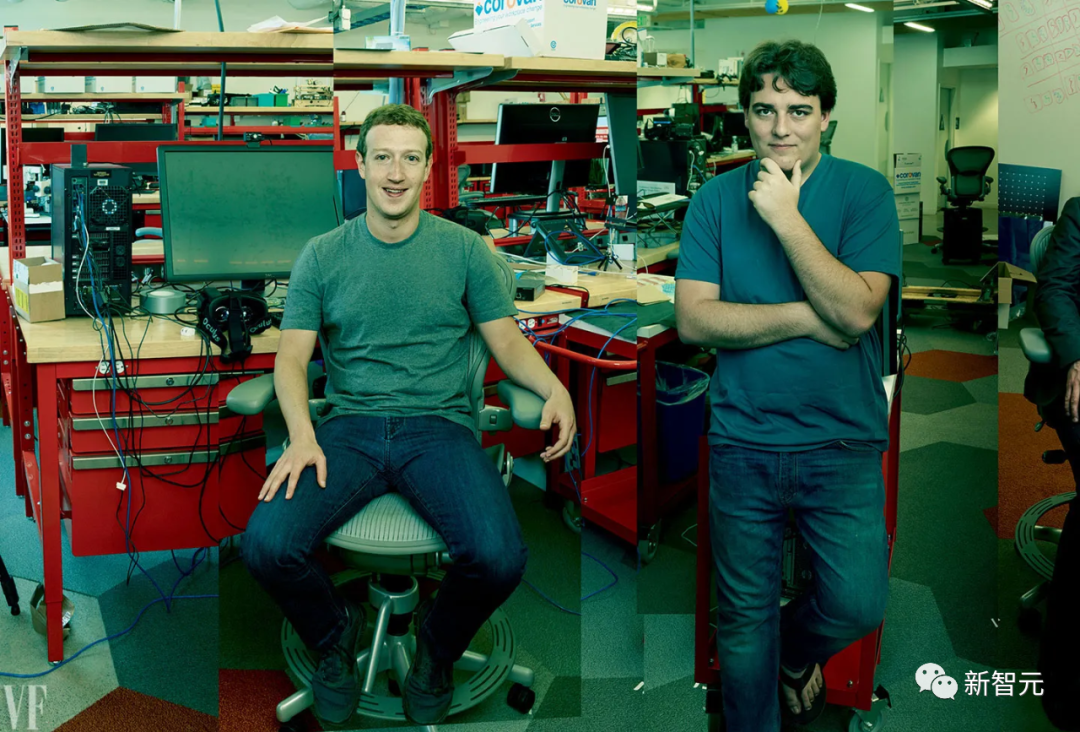
之后的故事大家就非常熟悉了,创办不到2年的Oculus,在2014年被Facebook以23亿美元收购了。
以上是19岁辍学创业,两年价值20亿美元!小扎元宇宙野心曾由他来支撑的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 Stable Diffusion 3论文终于发布,架构细节大揭秘,对复现Sora有帮助?
Mar 06, 2024 pm 05:34 PM
Stable Diffusion 3论文终于发布,架构细节大揭秘,对复现Sora有帮助?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3的论文终于来了!这个模型于两周前发布,采用了与Sora相同的DiT(DiffusionTransformer)架构,一经发布就引起了不小的轰动。与之前版本相比,StableDiffusion3生成的图质量有了显着提升,现在支持多主题提示,并且文字书写效果也得到了改善,不再出现乱码情况。 StabilityAI指出,StableDiffusion3是一个系列模型,其参数量从800M到8B不等。这一参数范围意味着该模型可以在许多便携设备上直接运行,从而显着降低了使用AI
 你是否真正掌握了坐标系转换?自动驾驶离不开的多传感器问题
Oct 12, 2023 am 11:21 AM
你是否真正掌握了坐标系转换?自动驾驶离不开的多传感器问题
Oct 12, 2023 am 11:21 AM
一先导与重点文章主要介绍自动驾驶技术中几种常用的坐标系统,以及他们之间如何完成关联和转换,最终构建出统一的环境模型。这里重点理解自车到相机刚体转换(外参),相机到图像转换(内参),图像到像素有单位转换。3d向2d转换会有相应的畸变,平移等。重点:自车坐标系相机机体坐标系需要被重写的是:平面坐标系像素坐标系难点:要考虑图像畸变,去畸变和加畸变都是在像平面上去补偿二简介视觉系统一共有四个坐标系:像素平面坐标系(u,v)、图像坐标系(x,y)、相机坐标系()和世界坐标系()。每种坐标系之间均存在联系,
 DualBEV:大幅超越BEVFormer、BEVDet4D,开卷!
Mar 21, 2024 pm 05:21 PM
DualBEV:大幅超越BEVFormer、BEVDet4D,开卷!
Mar 21, 2024 pm 05:21 PM
这篇论文探讨了在自动驾驶中,从不同视角(如透视图和鸟瞰图)准确检测物体的问题,特别是如何有效地从透视图(PV)到鸟瞰图(BEV)空间转换特征,这一转换是通过视觉转换(VT)模块实施的。现有的方法大致分为两种策略:2D到3D和3D到2D转换。2D到3D的方法通过预测深度概率来提升密集的2D特征,但深度预测的固有不确定性,尤其是在远处区域,可能会引入不准确性。而3D到2D的方法通常使用3D查询来采样2D特征,并通过Transformer学习3D和2D特征之间对应关系的注意力权重,这增加了计算和部署的
 自动驾驶与轨迹预测看这一篇就够了!
Feb 28, 2024 pm 07:20 PM
自动驾驶与轨迹预测看这一篇就够了!
Feb 28, 2024 pm 07:20 PM
轨迹预测在自动驾驶中承担着重要的角色,自动驾驶轨迹预测是指通过分析车辆行驶过程中的各种数据,预测车辆未来的行驶轨迹。作为自动驾驶的核心模块,轨迹预测的质量对于下游的规划控制至关重要。轨迹预测任务技术栈丰富,需要熟悉自动驾驶动/静态感知、高精地图、车道线、神经网络架构(CNN&GNN&Transformer)技能等,入门难度很大!很多粉丝期望能够尽快上手轨迹预测,少踩坑,今天就为大家盘点下轨迹预测常见的一些问题和入门学习方法!入门相关知识1.预习的论文有没有切入顺序?A:先看survey,p
 GSLAM | 一个通用的SLAM架构和基准
Oct 20, 2023 am 11:37 AM
GSLAM | 一个通用的SLAM架构和基准
Oct 20, 2023 am 11:37 AM
突然发现了一篇19年的论文GSLAM:AGeneralSLAMFrameworkandBenchmark开源代码:https://github.com/zdzhaoyong/GSLAM直接上全文,感受这项工作的质量吧~1摘要SLAM技术最近取得了许多成功,并吸引了高科技公司的关注。然而,如何同一现有或新兴算法的界面,一级有效地进行关于速度、稳健性和可移植性的基准测试仍然是问题。本文,提出了一个名为GSLAM的新型SLAM平台,它不仅提供评估功能,还为研究人员提供了快速开发自己的SLAM系统的有用
 首个多视角自动驾驶场景视频生成世界模型 | DrivingDiffusion: BEV数据和仿真新思路
Oct 23, 2023 am 11:13 AM
首个多视角自动驾驶场景视频生成世界模型 | DrivingDiffusion: BEV数据和仿真新思路
Oct 23, 2023 am 11:13 AM
笔者的一些个人思考在自动驾驶领域,随着BEV-based子任务/端到端方案的发展,高质量的多视图训练数据和相应的仿真场景构建愈发重要。针对当下任务的痛点,“高质量”可以解耦成三个方面:不同维度上的长尾场景:如障碍物数据中近距离的车辆以及切车过程中精准的朝向角,以及车道线数据中不同曲率的弯道或较难采集的匝道/汇入/合流等场景。这些往往靠大量的数据采集和复杂的数据挖掘策略,成本高昂。3D真值-图像的高度一致:当下的BEV数据获取往往受到传感器安装/标定,高精地图以及重建算法本身的误差影响。这导致了我
 综述!深度模型融合(LLM/基础模型/联邦学习/微调等)
Apr 18, 2024 pm 09:43 PM
综述!深度模型融合(LLM/基础模型/联邦学习/微调等)
Apr 18, 2024 pm 09:43 PM
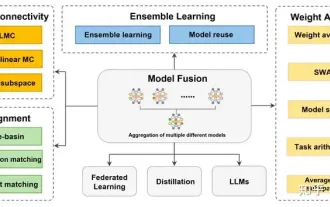
23年9月国防科大、京东和北理工的论文“DeepModelFusion:ASurvey”。深度模型融合/合并是一种新兴技术,它将多个深度学习模型的参数或预测合并为一个模型。它结合了不同模型的能力来弥补单个模型的偏差和错误,以获得更好的性能。而大规模深度学习模型(例如LLM和基础模型)上的深度模型融合面临着一些挑战,包括高计算成本、高维参数空间、不同异构模型之间的干扰等。本文将现有的深度模型融合方法分为四类:(1)“模式连接”,通过一条损失减少的路径将权重空间中的解连接起来,以获得更好的模型融合初
 不止3D高斯!最新综述一览最先进的3D重建技术
Jun 02, 2024 pm 06:57 PM
不止3D高斯!最新综述一览最先进的3D重建技术
Jun 02, 2024 pm 06:57 PM
写在前面&笔者的个人理解基于图像的3D重建是一项具有挑战性的任务,涉及从一组输入图像推断目标或场景的3D形状。基于学习的方法因其直接估计3D形状的能力而受到关注。这篇综述论文的重点是最先进的3D重建技术,包括生成新颖的、看不见的视图。概述了高斯飞溅方法的最新发展,包括输入类型、模型结构、输出表示和训练策略。还讨论了尚未解决的挑战和未来的方向。鉴于该领域的快速进展以及增强3D重建方法的众多机会,对算法进行全面检查似乎至关重要。因此,本研究对高斯散射的最新进展进行了全面的概述。(大拇指往上滑
