

国产机器人在高空领域挑战极限,争做爬壁作业王者

5月31日,镌极科技重磅发布全地形磁吸附爬壁机器人。该机器人是国内首次公开亮相能解决爬壁机器人高空作业、越障以及实现内外折角跨越的创新产品,有望解决船舶、化工等重工业领域高空爬壁作业刚需,打开我国高空自动化作业新局面。
镌极科技是上海交通大学科技成果转化项目公司,与绿的谐波旗下的开旋动力、钧微动力、赛威德等公司合作密切,以争做全球壁面移动机器人领导者为己任。
本次镌极发布的爬壁机器人参数非常优越,具备高达2:1负载/自重比,该款爬壁机器人能够轻松搭载一台协作机器人进行高空作业,完成高空焊接、打磨等复杂的爬壁作业,该项技术成功弥补了国内复杂环境高空作业市场空白,核心技术达到国际水平。

图1、机器人从立面到倒立面
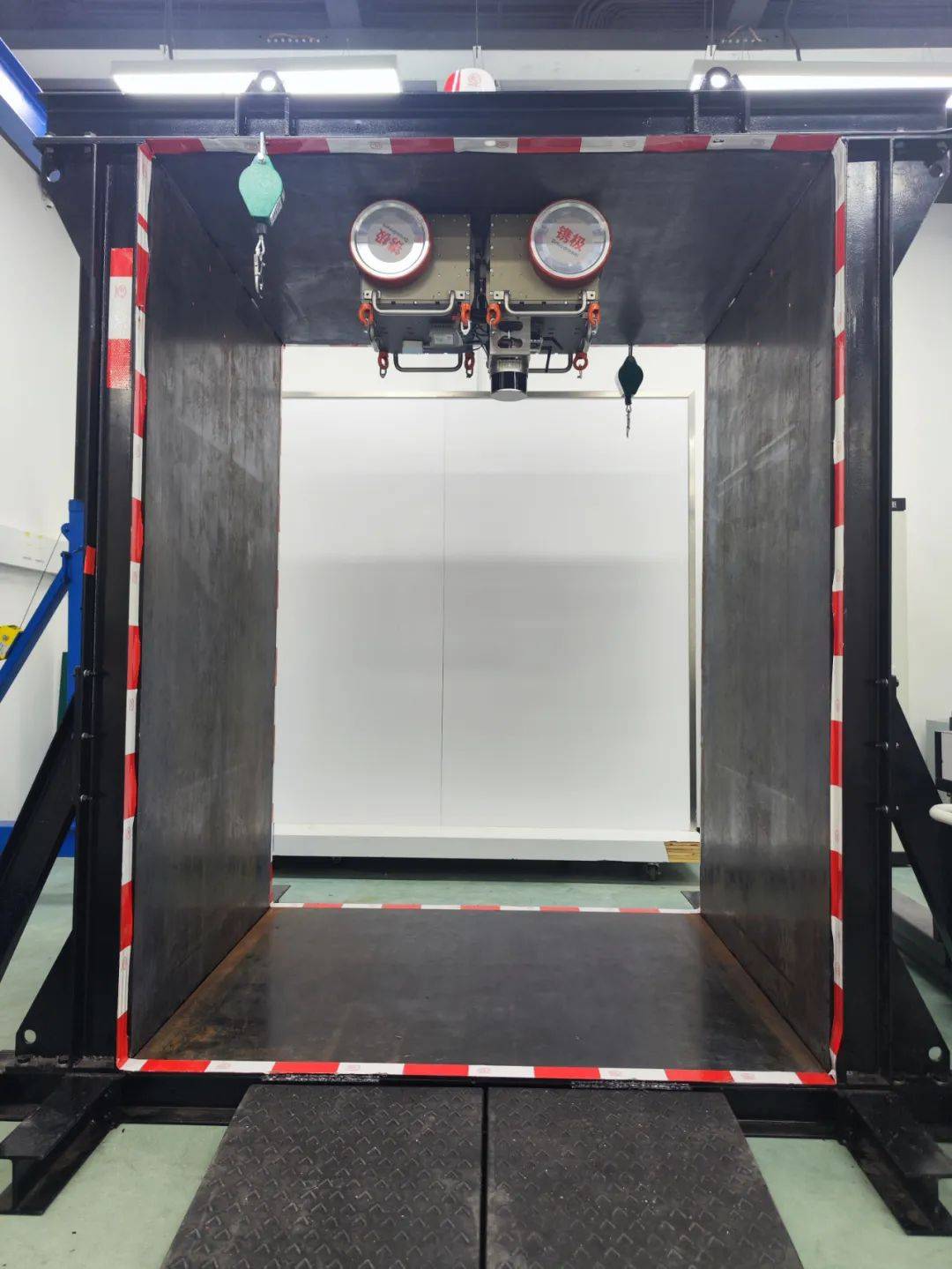
图2、机器人在倒立面运动
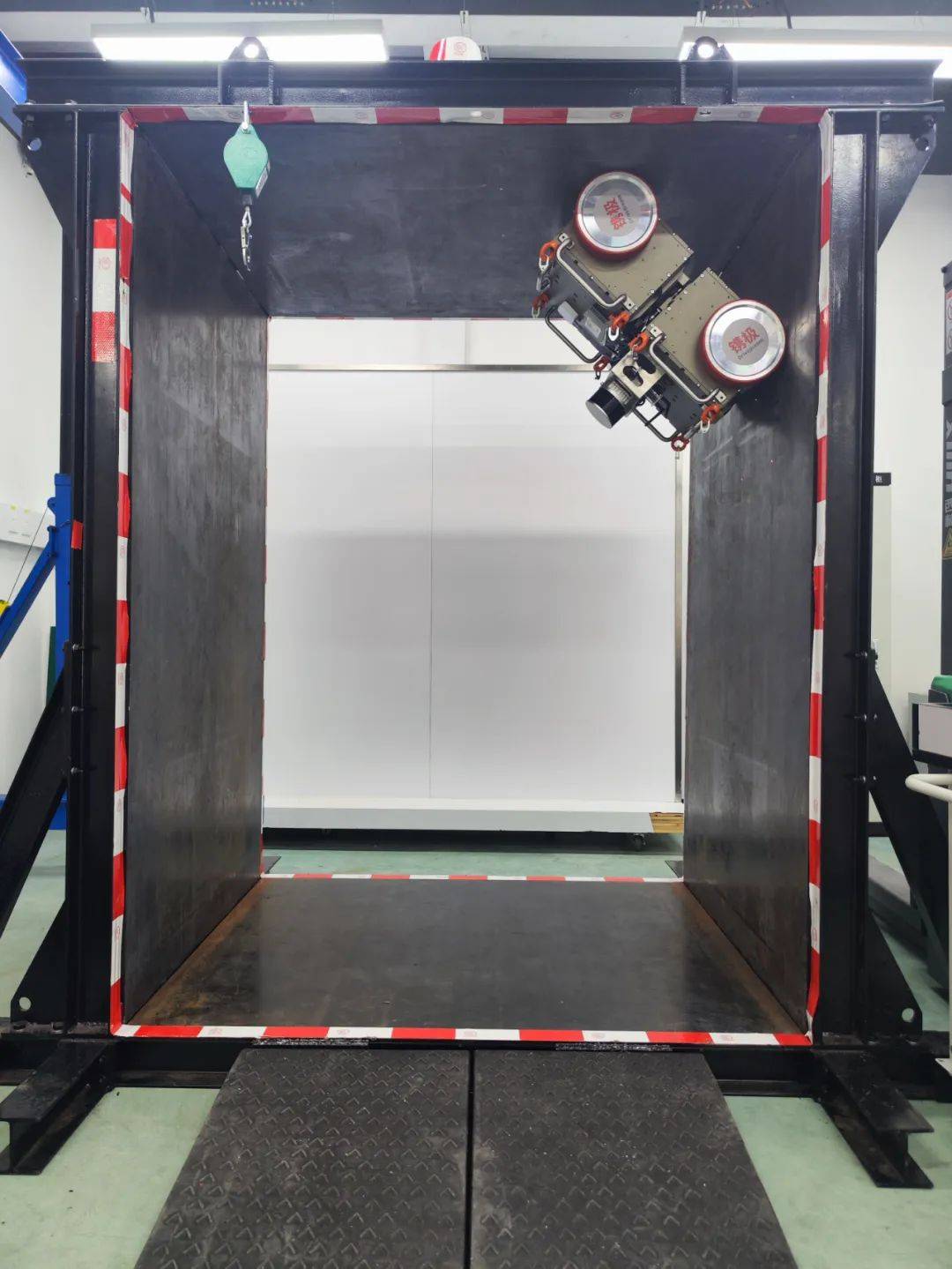
图3、机器人从倒立面到立面
该款产品背后,是镌极为机器人产品创新开创的复杂壁面全地形适应技术,机器人本体基于自主研发的大磁隙永磁吸附技术与阵列化大负载磁吸技术设计成,结合磁吸力感知调节与预警的创新方法,在四轮框内爬壁平台与五轮可变形爬壁机构基础上优势互补,在性能上突破了轮式爬壁移动机器人运动极限,首次完成内外折角及越障功能全覆盖,从而实现了机器人在高空作业的高移动能力、高适应能力、高通过能力、高负载能力,在国际上首次解决了复杂三维壁面爬壁作业难题。
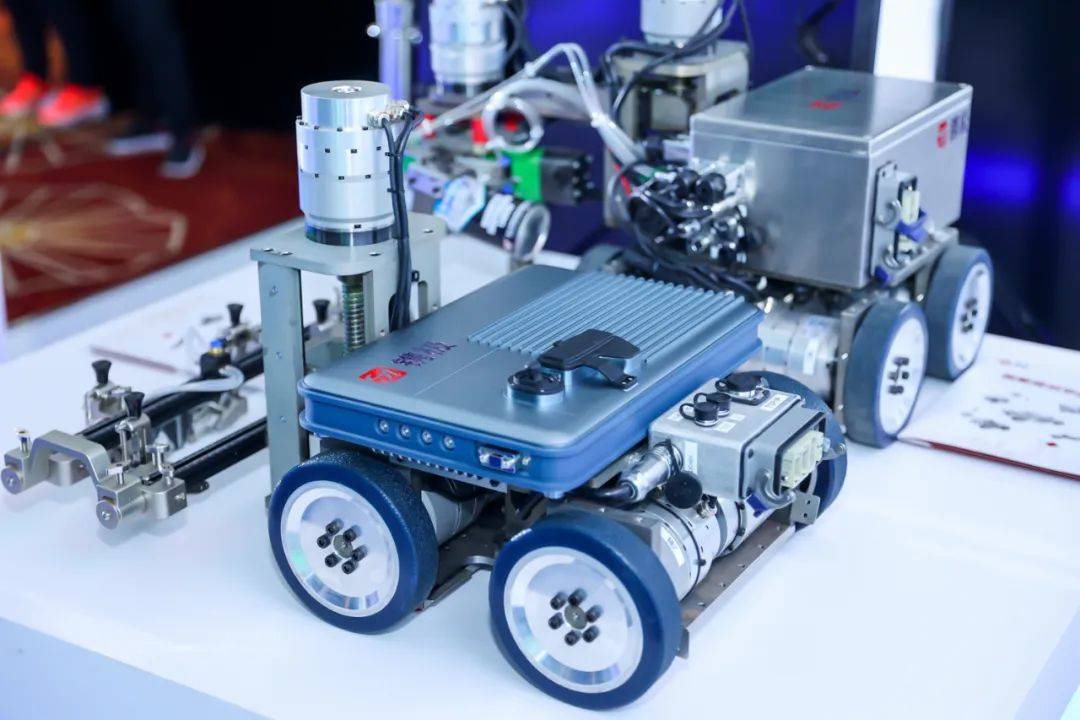
图4、四轮+六轴移动打磨爬壁机器人


图5、五轮全地形爬壁机器人正在翻越外折角
以造船、石化等高端行业的部分场景为例,镌极爬壁机器人系统能够携带机器人及末端操作设备在空中提供自动化作业可能,并根据客户需求提供涵盖软硬件、算法及服务的综合解决方案,完成高空场景的多个工艺一体化作业。我们的高空机器人产品在功能、性能和服务方面与市场上其他产品实现了显著的差异化。
在实际应用中,镌极爬壁机器人可以利用多种传感器信息实时建立复杂环境地图、定位位置、规划路径并自主做出决策。同时,由于镌极爬壁机器人还具备环境感知和避障、补偿力反馈机制赋予强越障能力,当机器人遇到复杂地形,可以自主调整轮面以增加环境适应性,且借助力磁耦合设计及控制算法实现,使整机维持极高综合负载能力条件下能耗最优。这使得镌极爬壁机器人具有不同复杂曲面适应力,能够更好实现复杂壁面作业,也意味着机器人能够很轻松切入罐体、船舶等行业的焊接、涂装、打磨、检测等全新领域,提供高性能、高精度且高度智能化的全新解决方案。
未来镌极爬壁机器人将主要面向重大工业领域提供机器人应用与解决方案,特别是在高空、密闭环境等危险作业环境,能通过机器人系统来帮助企业实现高空作业自动化,提高作业安全性、效率和质量。有望用于例如造船、石化、水电、火电、风电、核电等行业的船舶内部检修、储罐外表检测、大型钢结构、水冷壁、风塔等高空作业等。
据了解,镌极该款爬壁机器人主要通过与绿的谐波、上海交通大学开展“产学研用”合作开发,在研发过程中,重点攻克了精密减速器、电机、伺服系统、EHA等领域的部分卡脖子难题,让产品国产化率逐步提升。镌极爬壁机器人现在采用全部国产自研零部件作为关键核心组件,这样就保证了采购成本和关键零部件的品质完全在自己的掌控之中。
图6、小四轮爬壁检测机器人
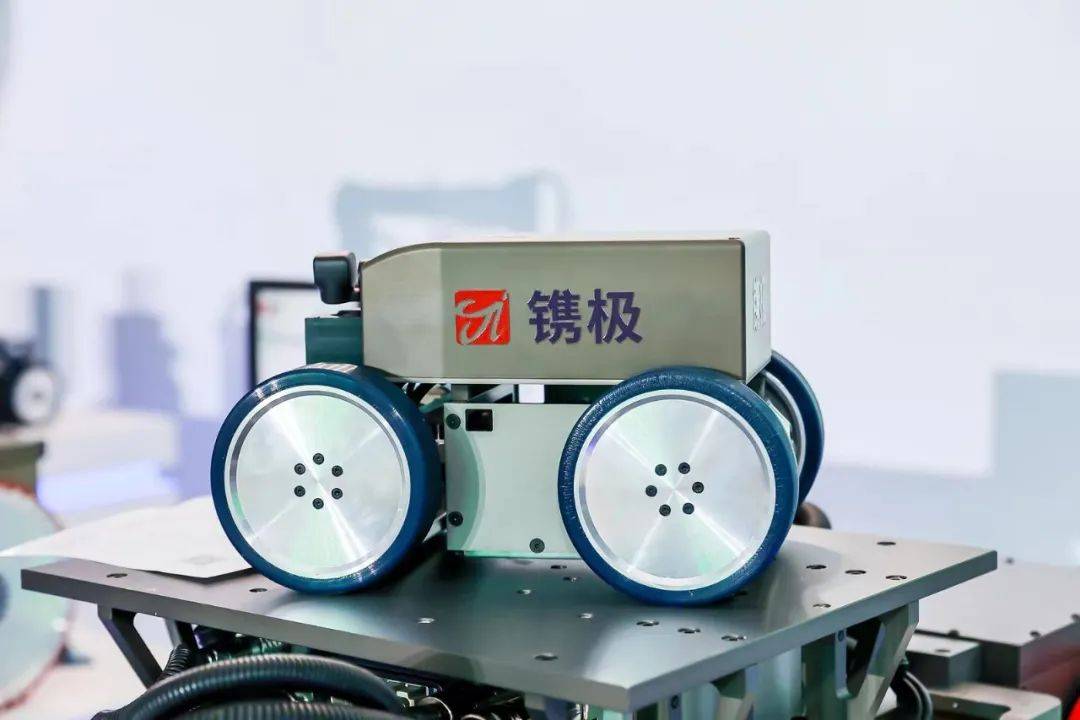
图7、相控阵四轮爬壁检测机器人
上海交通大学机器人研究所副所长、镌极科技联合创始人赵言正教授表示,未来镌极将继续加大研发投入,跟随行业技术发展趋势,持续创新产品与方案,增强机器人在自主导航能力、负载稳定性、遥控操作等方面性能,不断提高产品的智能化与综合性能,最终走向全球高端市场。
机器人可以取代全球高空作业市场约50-70%的工作,该市场规模超过200亿美元。这种永磁吸附爬壁机器人可以完全满足这个领域的需求,市场潜力高达数十亿美元。据悉,镌极目前已经取得一定市场订单,未来有望占领尚处空白的国内市场,并与国际企业同台竞技。
以上是国产机器人在高空领域挑战极限,争做爬壁作业王者的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 第二代Ameca来了!和观众对答如流,面部表情更逼真,会说几十种语言
Mar 04, 2024 am 09:10 AM
第二代Ameca来了!和观众对答如流,面部表情更逼真,会说几十种语言
Mar 04, 2024 am 09:10 AM
人形机器人Ameca升级第二代了!最近,在世界移动通信大会MWC2024上,世界上最先进机器人Ameca又现身了。会场周围,Ameca引来一大波观众。得到GPT-4加持后,Ameca能够对各种问题做出实时反应。「来一段舞蹈」。当被问及是否有情感时,Ameca用一系列的面部表情做出回应,看起来非常逼真。就在前几天,Ameca背后的英国机器人公司EngineeredArts刚刚演示了团队最新的开发成果。视频中,机器人Ameca具备了视觉能力,能看到并描述房间整个情况、描述具体物体。最厉害的是,她还能
 AI如何使机器人更具自主性和适应性?
Jun 03, 2024 pm 07:18 PM
AI如何使机器人更具自主性和适应性?
Jun 03, 2024 pm 07:18 PM
在工业自动化技术领域,最近有两个热点很难被忽视:人工智能(AI)和英伟达(Nvidia)。不要改变原内容的意思,微调内容,重写内容,不要续写:“不仅如此,这两者密切相关,因为英伟达在不仅仅局限于其最开始的图形处理单元(GPU),正在将其GPU技术扩展到数字孪生领域,同时紧密连接着新兴的AI技术。”最近,英伟达与众多工业企业达成了合作,包括领先的工业自动化企业,如Aveva、罗克韦尔自动化、西门子和施耐德电气,以及泰瑞达机器人及其MiR和优傲机器人公司。Recently,Nvidiahascoll
 2 个月不见,人形机器人 Walker S 会叠衣服了
Apr 03, 2024 am 08:01 AM
2 个月不见,人形机器人 Walker S 会叠衣服了
Apr 03, 2024 am 08:01 AM
机器之能报道编辑:吴昕国内版的人形机器人+大模型组队,首次完成叠衣服这类复杂柔性材料的操作任务。随着融合了OpenAI多模态大模型的Figure01揭开神秘面纱,国内同行的相关进展一直备受关注。就在昨天,国内"人形机器人第一股"优必选发布了人形机器人WalkerS深入融合百度文心大模型后的首个Demo,展示了一些有趣的新功能。现在,得到百度文心大模型能力加持的WalkerS是这个样子的。和Figure01一样,WalkerS没有走动,而是站在桌子后面完成一系列任务。它可以听从人类的命令,折叠衣物
 首个自主完成人类任务机器人出现,五指灵活速度超人,大模型加持虚拟空间训练
Mar 11, 2024 pm 12:10 PM
首个自主完成人类任务机器人出现,五指灵活速度超人,大模型加持虚拟空间训练
Mar 11, 2024 pm 12:10 PM
这周,由OpenAI、微软、贝佐斯和英伟达投资的机器人公司FigureAI宣布获得接近7亿美元的融资,计划在未来一年内研发出可独立行走的人形机器人。而特斯拉的擎天柱也屡屡传出好消息。没人怀疑,今年会是人形机器人爆发的一年。一家位于加拿大的机器人公司SanctuaryAI最近发布了一款全新的人形机器人Phoenix。官方号称它能以和人类一样的速率自主完成很多工作。世界上第一台能以人类速度自主完成任务的机器人Pheonix可以轻轻地抓取、移动并优雅地将每个对象放置在它的左右两侧。它能够自主识别物体的
 塑造未来的十款类人机器人
Mar 22, 2024 pm 08:51 PM
塑造未来的十款类人机器人
Mar 22, 2024 pm 08:51 PM
以下10款类人机器人正在塑造我们的未来:1、ASIMO:ASIMO由Honda开发,是最知名的人形机器人之一。ASIMO高4英尺,重119磅,配备先进的传感器和人工智能功能,使其能够在复杂的环境中导航并与人类互动。ASIMO的多功能性使其适用于各种任务,从帮助残疾人到在活动中进行演示。2、Pepper:由SoftbankRobotics创建,Pepper旨在成为人类的社交伴侣。凭借其富有表现力的面孔和识别情绪的能力,Pepper可以参与对话、在零售环境中提供帮助,甚至提供教育支持。Pepper的
 云鲸逍遥001扫拖机器人,长「脑子」了!| 体验
Apr 26, 2024 pm 04:22 PM
云鲸逍遥001扫拖机器人,长「脑子」了!| 体验
Apr 26, 2024 pm 04:22 PM
近几年最受消费者欢迎的智能家电,扫拖机器人可谓是其中之一。它所带来的操作便利性,甚至是无需操作,让懒人们释放了双手,让消费者能够从日常的家务中「解放」出来,也能拿更多的时间花在自己喜欢的事情上,变相提高了生活品质。借着这股热潮,市面上几乎所有的家电产品品牌都在做自己的扫拖机器人,一时间使得整个扫拖机器人市场热闹非凡。但市场的快速拓张必然会带来一个隐患:很多厂商会采用机海战术的方式快速占领更多的市场份额,从而导致很多新品并没有什么升级点,说它是“套娃”机型也不为过。不过,并不是所有的扫拖机器人都是
 人形机器人会变魔术了,春晚节目组了解一下
Feb 04, 2024 am 09:03 AM
人形机器人会变魔术了,春晚节目组了解一下
Feb 04, 2024 am 09:03 AM
一眨眼的功夫,机器人都已经学会变魔术了?只见它先是拿起桌上的水勺,向观众证明了里面什么也没有……然后,它又把手中鸡蛋似的物体放了进去,然后把水勺放回桌子上,开始“施法”……就在它把水勺再次拿起的时候,奇迹发生了。原先放进去的鸡蛋不翼而飞,跳出的东西变成了一个篮球……再来看一遍连贯动作:△此动图为二倍速一套动作下来如行云流水,只有把视频用0.5倍速反复观看,才终于发现了其中的端倪:如果手速再快一些,大概真的就可以瞒天过海了。有网友感叹,机器人变魔术的水平比自己还要高:为我们表演这段魔术的,是Mag
 美国大学开《萨尔达传说:王国之泪》工程学让学生比赛打造机器人
Nov 23, 2023 pm 08:45 PM
美国大学开《萨尔达传说:王国之泪》工程学让学生比赛打造机器人
Nov 23, 2023 pm 08:45 PM
创下有史以来销售速度最快的任天堂游戏《塞尔达传说:王国之泪》(TheLegendofZelda:TearsoftheKingdom)不仅因为左纳乌科技带来各种“塞尔达创作家”社群内容,同时也成为美国马里兰大学(UniversityofMaryland;UMD)全新工程学的一门课程。重写:《塞尔达传说:王国之泪》是任天堂创纪录销售最快的游戏之一。不仅仅因为左纳乌科技带来了丰富的社群内容,还成为了美国马里兰大学全新工程学课程的一部分今年秋季,马里兰大学的RyanD.Sochol副教授开设了一门名为《
