

微软AR/VR专利提出使用时间复用谐振驱动产生双极性电源

(映维网Nweon 2023年07月05日)XR头显的面部追踪方案可用于感知用户皮肤的微小运动。在一个示例方案中,头显可配备位于不同位置的多个感测天线的电路。天线信号可以馈入LC谐振电路,并由LC驱动器驱动至谐振。LC谐振电路的输出可以馈入感测放大器,为模数转换器ADC提供合适的信号,而ADC可以将感测信号转换成数字域进行进一步处理。
但与便携式设备中的典型电池相比,LC谐振驱动电路的传统实现可能需要相对较高的电源水平。因为LC谐振电路的感测信号的幅度应尽可能大,以最大限度地提高在模数转换过程中可能实现的整体动态范围和分辨率。
另外,由于电感器在电路中是体积庞大的元件,所以应该减少在整个系统中使用的元件总数,从而实现紧凑的形状参数。
为了进一步优化,微软在名为”Time-multiplexing resonant drive scheme to generate dual polarity supplies“的专利申请中提出,可以使用时间复用谐振驱动方案来产生双极性电源。
LC谐振驱动电路不需要一直运行,只需要在特定工作模式下运行即可。例如,在射频人脸检测方案中,当传感器获取传感信号时,LC谐振驱动电路可以在一个时间段内被激活,然后在另一个时间段内,电感器可以重复用于双极性电源的产生,从而采用电感器的时间复用方案。时间复用方案有助于共享与半桥谐振器相同的电路模块。
传统的LC谐振驱动电路用于传感器解决方案需要更高的电源电压,因为被感测信号的幅度应该尽可能大,以实现更高的分辨率。所以,微软认为时间复用谐振驱动方案产生双极性电源可能是实现所述传感器的最佳途径之一。
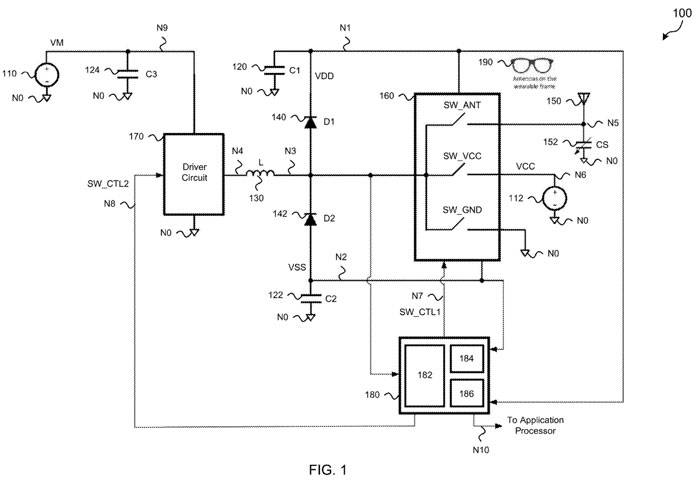
图1显示的第一系统100采用时间复用谐振驱动方案在LC谐振电路中产生双极性电源,并可用于射频面部检测应用。如图所示,系统100包括电池110、直流源112、第一电容电路120、第二电容电路122、第三电容电路124、电感电路130、第一二极管电路140、第二二极管电路142、天线150、感测电容器152、多路复用器MUX 160、驱动电路170和控制器电路180。天线150可以定位于可穿戴MR设备的各种位置,例如可穿戴框架190。
电池110耦合在节点N9和节点NO之间,为节点N9的VM提供对应的电池电压。直流源112耦合在节点N6和节点NO之间,并在节点N6处提供电压VCC。第一电容电路120耦合在节点N1和节点NO之间,指定为C1。第二电容电路122耦合在节点N2和节点NO之间,设为C2。第三电容电路124耦合在节点N9和节点NO之间,指定为C3。
电感电路130耦合在节点N3和节点N4之间,命名为l。第一个二极管电路140耦合在节点N3和节点N1之间,命名为D1。第二二极管电路142在节点N2和节点N3之间耦合,命名为D2。天线150耦合到节点N5,并具有对应于感测电容器152的特征电容。
感应电容152耦合在节点N5和节点NO之间,指定为CS。MUX 160包括节点N3处的输入端口,节点N5处的第一输出端口,节点N6处的第二输出端口,节点NO处的第三输出端口,节点N1处的第一电源端口,节点N2处的第二电源端口和节点N7处的控制端口。
驱动电路170包括节点N4的输出端口、节点N9的第一电源端口、节点NO的第二电源端口和节点N8的控制端口。控制器电路180包括节点N1处的第一输入端口、节点N2处的第二输入端口、节点N3处的第三输入端口、节点N7处的第一输出端口、节点N8处的第二输出端口和节点N10处的第三输出端口。
MUX 160与驱动电路170一起工作,有效地将节点N3处的电感电路130的充放电时间复用到节点N7处的天线150、节点N6处的直流电源112或节点NO处的电路地。
检测电容器152表示为具有可变电容值CS的电容器,其耦合在节点N5和节点NO之间。尽管显示为物理电容组件,但感测电容152对应于天线150的特性电容。由于天线物理上位于可穿戴框架900,因此天线的实际电容值将根据与用户皮肤的接近程度而变化。
电感电路130有效地串联耦合在驱动电路170的输出和天线150之间。从节点N4穿过电感电路130到检测电容152,可以识别出LC滤波电路。
控制器电路180可以实现为微控制器单元MCU。可以通过软件或固件指令配置MCU,并根据时分复用方案控制电路100的操作。所述方案包括三种基本模式:正方向充电(第一模式)、负方向充电(第二模式)和将天线作为面部运动检测的传感器操作(第三模式)。
在第一模式中,控制器电路180通过第二控制信号SW_CTL2激活驱动电路170的第一配置。第二控制信号将节点N4耦合到节点N9,使得节点N4有效地对应于电池电压VM。
同样在这种第一模式,控制器电路180脉冲通过第一控制信号SW_CTL1调制MUX 160的第一开关配置,所述开关通过MUX 160中的第三开关电路选择性地将节点N3耦合到节点NO。在脉冲高周期,节点N3耦合到节点NO的电路接地,使得从节点N4到节点N3的电感电路130向正方向充电。
在脉冲低周期,节点N3与节点NO解耦,并且来自电感电路130的存储电流流过第一二极管电路140,将电荷传递给第一电容器电路120 (C1)。随着时间的推移,重复脉冲将导致第一个电容电路120 (C1)上的电荷积累,足以在节点N1处产生正电源电压VDD。
在第二模式期间,控制器电路180通过第二控制信号SW_CTL2激活驱动电路170的第二驱动配置。控制信号将节点N4耦合到节点NO,使得节点N4有效地对应于电路地。
另外,在第二模式中,控制器电路180通过第一控制信号SW_CTL1脉冲调制用于MUX 160的第二开关配置,而所述开关通过MUX 160中的第二开关电路选择性地将节点N3耦合到节点N6。在脉冲高周期,节点N3耦合到节点N6处的直流源112,使得电感电路130从节点N3到节点N4负方向充电。
在脉冲的低周期,节点N3与节点N6解耦,并且来自电感电路130的存储电流流过第二二极管电路140,向第二电容器电路122 (C2)提供电荷。随着时间的推移,重复脉冲将导致第二电容电路122 (C2)上的电荷积累,足以在节点N2处产生负电源电压VSS。
在第三种模式中,控制器电路180通过第一控制信号SW_CTL1为MUX 160选择第三种开关配置。所述开关通过MUX 160中的第一开关电路开关将节点N3耦合到节点N5。
同样在第三模式中,控制器电路180通过第二控制信号SW_CTL2选择性地激活驱动电路170。第二控制信号脉冲调制节点N9与节点NO之间的节点N4耦合。在这第三种模式中,电感电路130耦合到天线150及其特性检测电容152 (CS),形成LC谐振电路。
通过脉冲调制节点N4在节点N9和节点NO之间的耦合,激励LC谐振电路在节点N3处产生可观测到的振荡信号,并可用于人脸跟踪。先前在第一和第二模式下产生的双电源电压(VDD, VSS)用于操作各种电路,而LC谐振电路在第三模式下激发。基于LC滤波器的高Q谐振特性,暂态响应将对应于节点N3处的交流信号。
控制器电路180可以配置为捕获来自节点N3的感测信号,然后可以将其作为节点N10的数字信号提供给其他系统以进行进一步处理。由于LC滤波器的高Q特性,感测信号可能具有显著的峰值到峰值电压。因此,在被控制器电路180评估之前,可能需要额外的电路来按比例减小信号大小。
图1说明了一种双重用途的电感配置,既用于产生直流电压电源,又用于用于射频面部运动检测的DC- AC转换器,这适用于使用电池供电的便携式系统。
微软指出,所提出的系统包括具有高质量因子的LC滤波器(或谐振器),其中LC滤波器使用串联电感电路与由用户的传感天线和面部皮肤形成的传感电容器相结合。所述LC滤波器配置为以射频面部追踪系统的谐振频率放大交流电源的交流电压。
所述方案的一个重要方面是面部追踪系统受益于降低电路复杂度。
LC滤波器的谐振频率会随着天线感应电容的变化而变化,感应电容会随着相对于天线位置的面部运动而变化。对于给定的固定输入频率,LC滤波器输出信号的增益和相位将随着检测到的电容变化而变化。由于LC滤波器谐振频率处的峰值增益和高Q,可以用相对较小的输入信号实现非常大的输出信号。
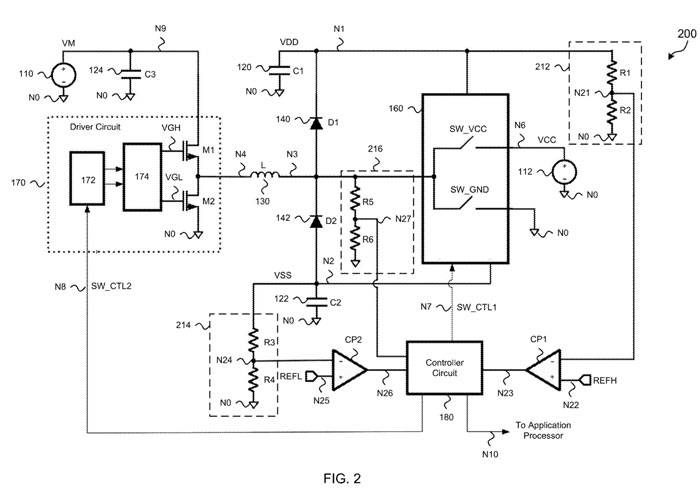
图2显示的第二系统200采用时间复用谐振驱动方案在LC谐振电路中产生双极性电源,并可用于射频面部检测应用。如图所示,系统200包括电池110、直流源112、第一电容电路120、第二电容电路122、第三电容电路124、电感电路130、第一二极管电路140、第二二极管电路142、多路复用器MUX 160、驱动电路170和控制器电路180。
与图1相比,图2的系统包括两个比较器CP1和CP2,以及三个分压器或标度电路(212、214和216)。第一分压器电路212包括在节点N1和节点NO之间串联耦合的两个电阻R1、R2,第一分压器电路的输出对应于节点N21。
第一比较器CP1包括耦合到节点N21的反相输入(−)、耦合到节点N22的非反相输入(+)和耦合到节点N23的输出。第二分压器电路214包括在节点N2和节点NO之间串联耦合的两个电阻器R3、R4,第二分压器电路的输出对应于节点N24。
第二比较器CP2包括耦合到节点N24的反相输入(−)、耦合到节点N25的非反相输入(+)和耦合到节点N26的输出。第三分压器电路216包括在节点N3和节点NO之间串联耦合的两个电阻R5、R6,第二分压器电路的输出对应于节点N27。
上述分压器电路配置为将来自输入节点中的相应节点之一的电压降至用于进一步处理的合适水平。例如,由电阻R1和R2组成的第一分压器电路检测节点N1的电压,并产生节点N21检测到的电压的缩放版本。
同样,由电阻R3和R4组成的第二分压器电路检测节点N2处的电压,并产生节点N24处被检测电压的缩放版本;而由电阻器R5和R6组成的第三分压器电路则对节点N3的电压进行感测,并产生节点N27感测电压的缩放版本。
比较器CP1和CP2配置为在其输入端的相应电压达到目标电压时检测。例如,配置第一比较器CP1,将节点N21的感测电压与第一参考电压REFH进行比较,并在节点N23产生信号。
类似地,配置第二比较器CP2,将节点N24的感测电压与第二个参考电压REFL进行比较,并在节点N26产生信号。
控制器电路180使用来自节点N23和N26的信号作为输入来控制电感电路130的充电时间和占空比。
第三分压器电路216的输出显示为在节点N27处耦合到控制器电路180的输入。这个输入对应于节点N3的感测电压的缩放版本。在工作上,节点N3处的电压可以表示LC谐振电路的响应,如图1所示的由电感130和感测电容152组成的LC谐振电路。在节点N27处测量的LC谐振电路的响应可以通过控制器电路180中的ADC 184转换为数字值。
驱动电路170的详细实现同样在图2中示出,其包括逻辑块172、栅极驱动块174、场效应管M1和场效应管M2。逻辑块172包括耦合到节点N8的输入端口和耦合到栅极驱动器块174的一对输出。栅极驱动器块177包括耦合到FET M1栅极的第一输出(VGH)和耦合到FET M2栅极的第二输出(VGL)。
FET M1同时包括耦合到节点N9的漏极和耦合到节点N4的源极。FET M2同时包括耦合到节点N4的漏极和耦合到节点NO的源极。操作上,节点N8处的信号可以表示单个控制信号或多个控制信号,其通过驱动电路170控制电感的充电的定时和占空比。
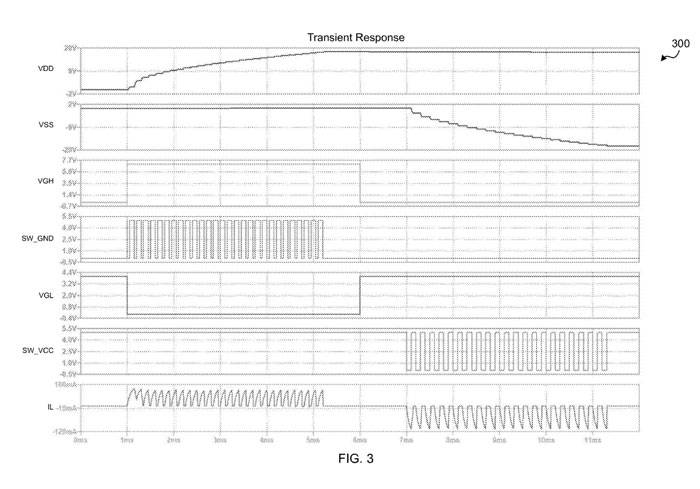
图3示出了用于示例时间复用谐振驱动方案的瞬态响应,例如用于FIGS的示例系统。图3包括双电源(VDD, VSS)的电压波形,驱动电路170的高低门控制信号(VGH, VGL),多路复用电路160的第一和第二开关控制信号,以及电感电路130中流动的电流的电流波形。
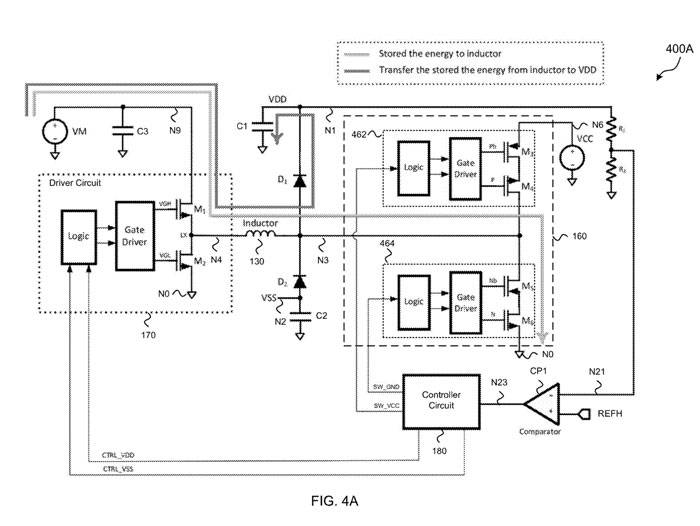
图4A示出在LC谐振电路中产生双极性电源的第三例时间复用谐振驱动方案的操作的第一部分。
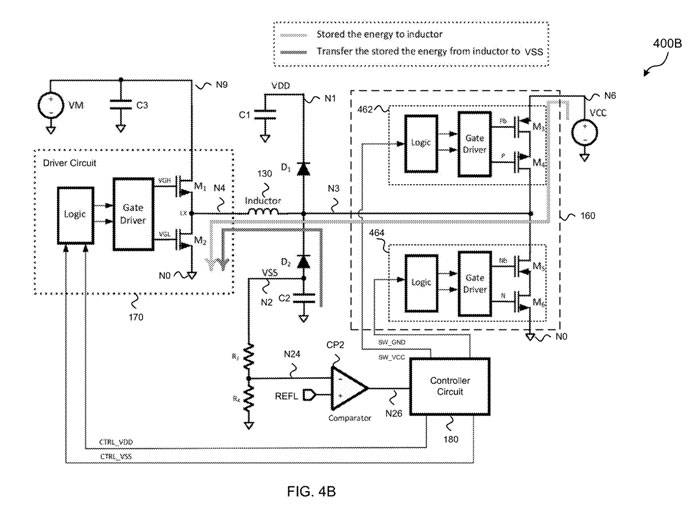
图4B示出在LC谐振电路中产生双极性电源的第三例时间复用谐振驱动方案的操作的第二部分。
图2、4A和4B表示为第一场效应管和第二场效应管包括n型场效应管。双极性电源(VDD, VSS)可以通过驱动电路170作为半桥谐振器的操作产生,两个开关通过多路复用器的操作连接到直流电压源和地。
最初,电容器C1或C2可能没有存储电荷,因此节点N1和N2上的电源电压VDD和VSS可能不符合要求。比较器CP1通过节点N21的第一分压器(R1, R2)的输出将节点N1的电压与正参考电压REFH进行比较,并在节点N23产生比较器输出。
比较器CP2(通过节点N24的第二个分压器(R3, R4)的输出将节点N2的电压与负参考电压REFL进行比较,并在节点N26产生比较器输出。
控制器电路180对节点N23和N26的电压进行评估,判断电压是否不在期望值,并产生一个或多个控制信号,以启动电源的充电过程。
如图4A所示,当节点N1处的电源VDD过低时,半桥谐振器的高侧FET M2激活(如VGH高),而低侧FET M2被去激活,从而产生正电源。然后用控制信号将开关电路464制到将电感电路130的节点N3耦合到节点NO的电路地。
当开关电路464处于闭合状态时,电流从电池VM通过驱动电路流入节点N4处的电感电路130,节点N3通过开关电路464耦合到节点NO处的电路地,电感电路130有效地正向存储电流。
当开关电路464处于开路状态时,电感电路130电流中存储的能量通过二极管电路D1流向节点N1,在节点N1中电容C1存储电荷并相应提高电源电压VDD。在这种调制的多个周期内,正电源VDD的值将增加,直到达到所需的正电压水平,比较器CP1将跳闸以通知控制器电路180达到所需的水平。一旦正电源VDD达到所需值,驱动电路170的高侧开关FET M1被控制器电路180停用。
如图4B所示,当节点N2处的电源VSS过高时,半桥谐振器的低侧FET M2激活,而高侧FET M1被去激活,从而产生负电源。然后用控制信号将开关电路462调制到电感电路130的节点N3到节点N6或VCC的直流源。
当开关电路462处于闭合状态时,电流从节点N6的直流源VCC流过节点N3的电感电路130,其中节点N4通过驱动电路170耦合到节点NO的电路地,电感电路130有效地反向存储电流。
当开关电路462处于开路状态时,电感电路130中的存储电流从地节点NO流过,通过电容器C2和二极管电路D1到达节点N3。在节点N3中,电感的能量转移到电容器C2,从而降低电源电压VSS。
在此调制的多个周期内,负电源VSS的值将降低,直到达到所需的负电压供应水平,比较器CP2将跳闸以通知控制器电路180已达到所需的水平。一旦负电源VSS处于所需值,驱动电路170的低侧开关FET M2被控制器电路180停用。
相关专利:Microsoft Patent | Time-multiplexing resonant drive scheme to generate dual polarity supplies
名为”Time-multiplexing resonant drive scheme to generate dual polarity supplies“的微软专利申请最初在2021年12月提交,并在日前由美国专利商标局公布。
以上是微软AR/VR专利提出使用时间复用谐振驱动产生双极性电源的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 最佳AI艺术生成器(免费付款)创意项目
Apr 02, 2025 pm 06:10 PM
最佳AI艺术生成器(免费付款)创意项目
Apr 02, 2025 pm 06:10 PM
本文回顾了AI最高的艺术生成器,讨论了他们的功能,对创意项目的适用性和价值。它重点介绍了Midjourney是专业人士的最佳价值,并建议使用Dall-E 2进行高质量的可定制艺术。
 开始使用Meta Llama 3.2 -Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
开始使用Meta Llama 3.2 -Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
Meta的Llama 3.2:多模式和移动AI的飞跃 Meta最近公布了Llama 3.2,这是AI的重大进步,具有强大的视觉功能和针对移动设备优化的轻量级文本模型。 以成功为基础
 最佳AI聊天机器人比较(Chatgpt,Gemini,Claude&更多)
Apr 02, 2025 pm 06:09 PM
最佳AI聊天机器人比较(Chatgpt,Gemini,Claude&更多)
Apr 02, 2025 pm 06:09 PM
本文比较了诸如Chatgpt,Gemini和Claude之类的顶级AI聊天机器人,重点介绍了其独特功能,自定义选项以及自然语言处理和可靠性的性能。
 Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4当前可用并广泛使用,与诸如ChatGpt 3.5(例如ChatGpt 3.5)相比,在理解上下文和产生连贯的响应方面取得了重大改进。未来的发展可能包括更多个性化的间
 顶级AI写作助理来增强您的内容创建
Apr 02, 2025 pm 06:11 PM
顶级AI写作助理来增强您的内容创建
Apr 02, 2025 pm 06:11 PM
文章讨论了Grammarly,Jasper,Copy.ai,Writesonic和Rytr等AI最高的写作助手,重点介绍了其独特的内容创建功能。它认为Jasper在SEO优化方面表现出色,而AI工具有助于保持音调的组成
 选择最佳的AI语音生成器:评论的顶级选项
Apr 02, 2025 pm 06:12 PM
选择最佳的AI语音生成器:评论的顶级选项
Apr 02, 2025 pm 06:12 PM
本文评论了Google Cloud,Amazon Polly,Microsoft Azure,IBM Watson和Discript等高级AI语音生成器,重点介绍其功能,语音质量和满足不同需求的适用性。
 构建AI代理的前7个代理抹布系统
Mar 31, 2025 pm 04:25 PM
构建AI代理的前7个代理抹布系统
Mar 31, 2025 pm 04:25 PM
2024年见证了从简单地使用LLM进行内容生成的转变,转变为了解其内部工作。 这种探索导致了AI代理的发现 - 自主系统处理任务和最少人工干预的决策。 Buildin
 如何访问猎鹰3? - 分析Vidhya
Mar 31, 2025 pm 04:41 PM
如何访问猎鹰3? - 分析Vidhya
Mar 31, 2025 pm 04:41 PM
猎鹰3:革命性的开源大语模型 Falcon 3是著名的猎鹰系列LLMS系列中的最新迭代,代表了AI技术的重大进步。由技术创新研究所(TII)开发
