

如何提高集群协作效率?中外团队合作研发基于均值偏移的机器人队形控制策略

考虑“人群排队进入电梯”这样一个场景。如果先进去的人是“自私”的,那么他进入电梯后就会停在原地,这时候会挡住后面的人进入电梯。如果前面的人是“无私”的,那么他会主动往里走,这样后面的人才会顺利的进入电梯。
受到这个场景的启发,研究人员开发了无私探索的策略,这个简单的策略能够大幅度提升机器人集群系统的合作效率,该成果于2023年6月发表在Nature Communications。

▍引入“无私”探索:让机器人合作效率更高
在众多机器人集群系统中,集群队形控制是一个重要而独特的问题。相比于其它集群协同问题,队形控制有一个独特的技术挑战,即全局队形实际上是一个全局约束条件。该约束条件使得本来是合作的机器人之间产生了竞争关系。从本质上来说,正是这种竞争关系给队形控制带来了许多困难。
传统方法通常使用目标分配来解决机器人之间的竞争问题。然而,基于分配的方法具有容错性和适应性较弱的问题。当分配的目标不合理或者某些机器人出现故障时,需要不断重分配目标,会导致效率较低。
近日,来自西湖大学、北京航空航天大学、清华大学和英国谢菲尔德大学的研究人员提出了一种基于“无私”探索策略的新型机器人协调控制方法,其核心是通过基于Mean-Shift的算法来化解机器人之间的竞争冲突:即当一个机器人预测到将与周围机器人产生竞争时,会主动放弃其当前位置,转而去向更空旷的区域。正因为该策略能“主动”化解冲突而被称为“无私”策略。
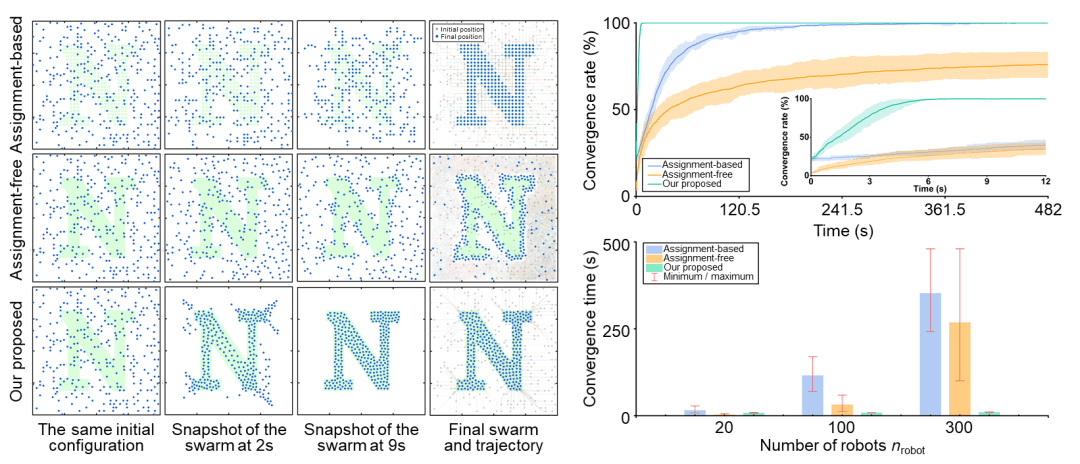
相比最新研究工作,所提出的“无私”探索策略的效率在集群规模较大时能够拥有数十倍的提升,并且这种提升会随着集群规模的增加而进一步增强。而且,由于不依赖于目标分配,该策略天然具有良好的容错性和适应性,可以拓展到复杂空间探索、协同搬运等任务。
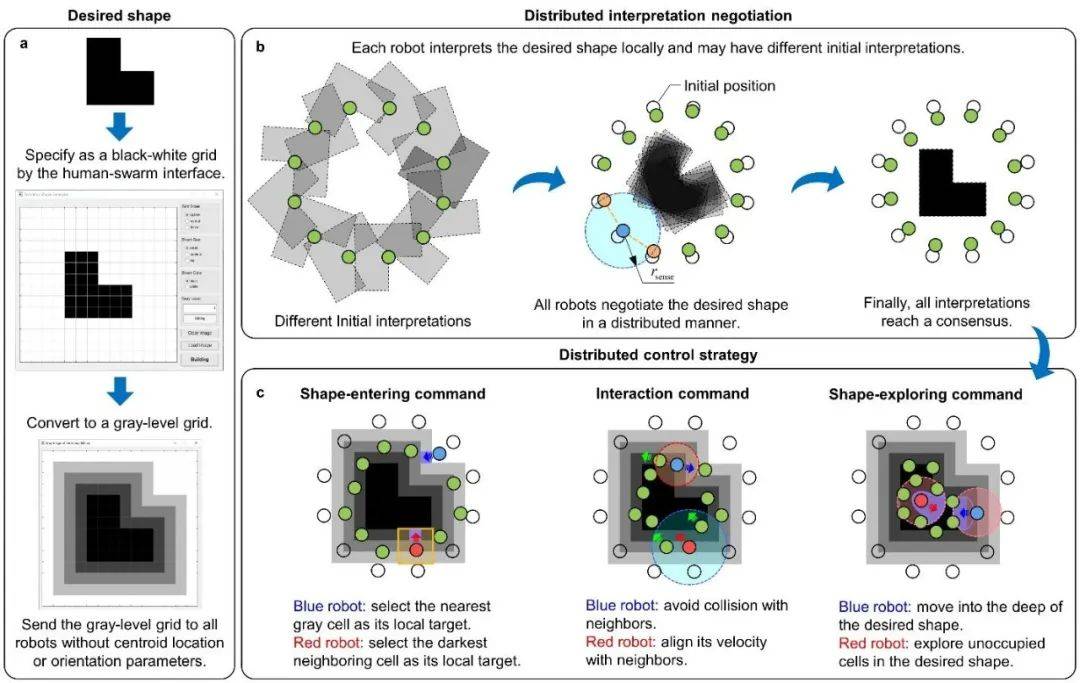
“无私”探索策略由三个部分组成。第一部分是人—集群交互系统,用来制定人所需要的几何队形。第二部分是分布式协商算法,所有机器人以分布式的方式与周围邻居协商目标队形的欧氏参数,包括位置和方向。第三部分也是最重要的,就是分布式队形控制算法。该控制算法由三个控制指令组成。首先是队形进入指令,其作用是将机器人引入到目标队形内。第二是队形探索指令,其作用是通过Mean-Shift的机制探索队形内的可行区域。第三是交互指令,其作用是实现机器人之间的避撞和速度对齐。
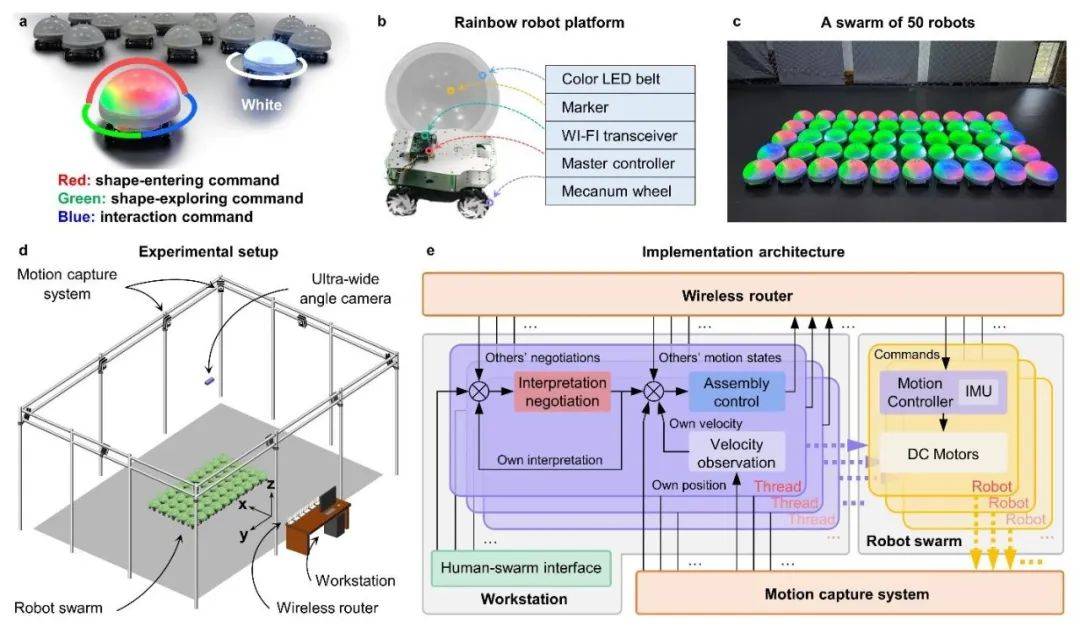
基于该策略,研究团队开发了包含50台地面机器人的集群实验系统。相关实验是在室内动捕系统的支持下进行的,通过多线程分布式并行方式实现。
▍机器人集群执行多种任务:拥有高效协同和自主控制能力
“无私”探索策略能够控制机器人自组织形成复杂非凸形状。例如一个具有丰富枝丫的“雪花”队形,在该策略作用下,机器人集群能够精确实现队形,而不会陷入局部最优。而且,机器人集群可以在这种形成不同的非凸队形,并能够从一种形状平滑切换到另一种形状。
“无私”探索策略相比于最新的研究工作具有数十倍效率的提升,而且这种提升会随着集群规模的增加而进一步增强。
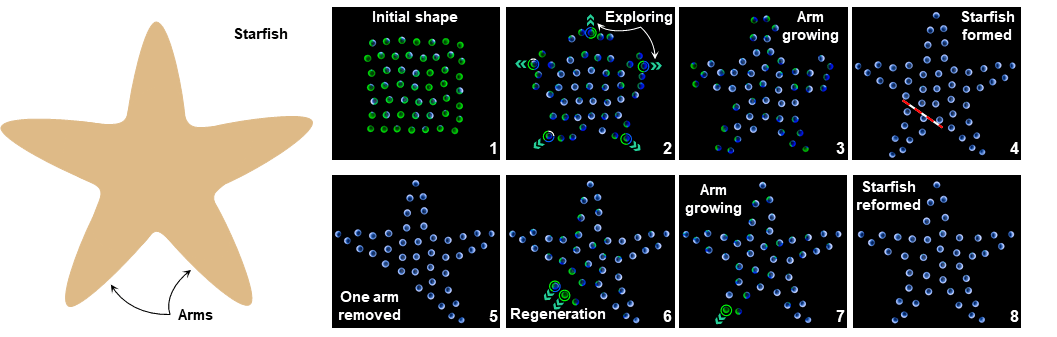
因不受目标分配和机器人数量变化等问题的的限制,"无私"探索策略具备自适应能力。例如,当一部分机器人被移出集群时,整个系统不需要任何的故障检测或容错控制,可以无缝重新组成队形,这使得整个系统具有了一定的“再生”能力。
“无私”探索策略的另外一个特点是能够跟踪时变队形。一个重要应用是实现多机器人协同搬运。在这个过程当中,一方面机器人要实现队形保持,另外一方面要跟随领导者实现队形运动,从而实现货物的协同搬运。
此外,“无私”探索策略可以用于探索复杂环境。例如,可以模拟人群通过狭窄入口进入到一个房间,而且不会被卡在入口处。值得指出的是,这个例子非常生动地诠释了“无私”探索的策略。它非常类似于人群进电梯的生活场景:假如有很多人要进入到电梯当中,如果一个人是“自私”的,那么他进入电梯后会停止运动,因为他已经达到了自己的目标。然而,这时候会挡住后面的人进入。如果这个人是“无私”的,那么他会主动往里面走,这样后面的人才会顺利地进入。
又比如,可以用于探索复杂迷宫。虽然迷宫当中有许多转角等非凸结构该策略由于其良好的探索性,依然能够成功实现对迷宫的全覆盖探索,而不会陷入局部最优点。
▍结论
该文章所提出的算法的思路非常简洁,但正是这样一个简单的想法解决了集群队形控制当中长期以来面临的一个重要问题。未来可以进一步扩展机器人平台的感知能力,让整个系统更加智能化,能涌现出真正类似于高智慧生物的集群行为。
▍文章来源
G. Sun, R. Zhou, Z. Ma, Y. Li, R. Groß, Z. Chen, and S. Zhao*, "Mean-shift exploration in shape assembly of robot swarms", Nature Communications, vol. 14, pp. 3476, 2023. https://doi.org/10.1038/s41467-023-39251-5
以上是如何提高集群协作效率?中外团队合作研发基于均值偏移的机器人队形控制策略的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 如何实现C++中的机器人控制和机器人导航?
Aug 25, 2023 pm 09:12 PM
如何实现C++中的机器人控制和机器人导航?
Aug 25, 2023 pm 09:12 PM
如何实现C++中的机器人控制和机器人导航?机器人控制和导航是机器人技术中非常重要的一部分。在C++编程语言中,我们可以利用各种库和框架来实现机器人的控制和导航。本文将介绍如何使用C++来编写控制机器人和实现导航功能的代码示例。一、机器人控制在C++中,我们可以利用串口通信或网络通信来实现机器人的控制。下面是一个使用串口通信控制机器人运动的示例代码:inclu
 如何使用go语言进行机器人控制与模拟的开发与实现
Aug 06, 2023 am 09:10 AM
如何使用go语言进行机器人控制与模拟的开发与实现
Aug 06, 2023 am 09:10 AM
如何使用Go语言进行机器人控制与模拟的开发与实现引言:随着科技的不断发展,机器人技术开始在各个领域得到广泛应用。而在机器人开发过程中,模拟和控制是两个重要的环节。本文将介绍如何使用Go语言进行机器人控制与模拟的开发与实现,并提供相应的代码示例。一、Go语言简介Go语言(或称Golang)是一种由Google开发的开源编程语言,它具有高效、简洁和并发性强的特点
 遵守PHP编写规范:提升团队合作和代码协同开发能力
Aug 25, 2023 pm 07:51 PM
遵守PHP编写规范:提升团队合作和代码协同开发能力
Aug 25, 2023 pm 07:51 PM
遵守PHP编写规范:提升团队合作和代码协同开发能力引言:在软件开发中,代码质量和团队合作是至关重要的。而遵守编程规范是提升代码质量和团队合作的有效手段之一。本文将重点介绍如何遵守PHP编写规范,以提升团队合作和代码协同开发能力。一、命名规范良好的命名规范能够增加代码的可读性和可维护性。在PHP编程中,我们建议遵循以下命名规范:变量和函数使用小驼峰命名法,如
 PHP中的机器人控制及其应用
Jun 23, 2023 am 08:39 AM
PHP中的机器人控制及其应用
Jun 23, 2023 am 08:39 AM
随着人工智能技术的不断发展,机器人已经成为现代社会中不可或缺的一部分。PHP中的机器人控制技术也在不断发展和应用,它可以帮助我们解决各种问题,提高效率。本文将介绍PHP中机器人控制及其应用。一、什么是机器人控制技术?机器人控制技术是指通过计算机或其他电子设备对机器人进行精确的操作和控制,使机器人能够按照预先设定的程序完成各种任务。机器人控制技术主要包括机器人
 PHP编写规范与团队合作的实践:提升项目开发效率
Aug 25, 2023 pm 11:27 PM
PHP编写规范与团队合作的实践:提升项目开发效率
Aug 25, 2023 pm 11:27 PM
PHP编写规范与团队合作的实践:提升项目开发效率在项目开发中,编写规范是一种必要的实践。良好的编写规范可以提高代码的可读性、可维护性,避免出现低级错误,使团队成员能够更好地协同合作。本文将介绍一些PHP编写规范的实践,并探讨如何在团队合作中应用这些规范,以提升项目的开发效率。使用PSR-2标准PSR-2是PHP代码规范的一个标准,建立了一套在代码格式、注释、
 Python开发经验总结:提升团队合作和沟通能力
Nov 22, 2023 am 08:44 AM
Python开发经验总结:提升团队合作和沟通能力
Nov 22, 2023 am 08:44 AM
随着信息技术的不断发展,Python作为一门简单、易学且功能强大的编程语言,在软件开发领域中得到了广泛的应用。作为一名Python开发工程师,在实际工作中积累了一些经验,我发现除了掌握好Python语法和编程技巧外,提升团队合作和沟通能力也是非常重要的。本文将分享我在Python开发中提升团队合作和沟通能力的经验。首先,在团队合作中,良好的沟通是至关重要的。
 如何在PHP中进行机器人控制和自动化开发?
May 21, 2023 am 08:27 AM
如何在PHP中进行机器人控制和自动化开发?
May 21, 2023 am 08:27 AM
PHP作为一种广泛应用于Web开发的编程语言,它在机器人控制和自动化开发领域也有着重要的应用价值。本篇文章将介绍如何在PHP中进行机器人控制及自动化开发。一、什么是机器人控制?机器人是指人工智能技术下的智能装置,能够模拟人类的行为,自主完成一系列任务。机器人控制,则是指通过计算机进行对机器人的信息处理、指令传输和监控等操作的过程。二、PHP如何进行机器人控制
 PHP中如何进行工业自动化和机器人控制?
May 22, 2023 pm 01:51 PM
PHP中如何进行工业自动化和机器人控制?
May 22, 2023 pm 01:51 PM
PHP是一种开源的服务器端脚本语言,它广泛应用于Web开发领域。但是,PHP并不仅限于Web开发,它还可以用于工业自动化和机器人控制。本文将介绍如何使用PHP进行工业自动化和机器人控制。一、PHP在工业自动化中的应用传感器数据采集在工业自动化中,传感器是非常重要的组成部分。传感器可以采集环境中各种参数的数据,如温度、湿度、压力等。传感器的数据可以通过串口、网
