

哈工大的这款轮腿机器人出3.0版本了!揭秘其设计、控制和性能测试

DARPA(美国国防高新科技计划署)机器人挑战赛(DRC)每两年举办一次,由美国国防部赞助,比赛希望能甄选出可在福岛核电站这种人类无法接近的危害发生地担负现场急救任务的机器人。
在2015年的DRC DARPA机器人挑战赛上,来自韩国的机器人DRC-HUBO靠着一身「绝活」击败了其他来自5个国家的22台顶尖机器人获得总冠军,其中不乏当时波士顿动力研发的 Atlas、日本HRP 这些明星机器人。
DRC-HUBO是一款既能站立又能跪下的机器人
在机器人技术领域,行走的平衡性一直是难以逾越的鸿沟。这也是最终HUBO获胜的关键——其膝盖和脚踝处装置的轮子可以允许机器人由行走模式切换到轮式移动。研发它的“KAIST”团队当时还赢得了200万美元的大奖。
危险环境中的探索和救援是机器人腿式运动的重要应用,用于灾害救援或野外探险的机器人往往被要求具有平坦道路上的快速移动能力和复杂地形的适应能力。基于此项难题,来自哈尔滨工业大学机电工程学院机器人与系统国家重点实验室的团队研发了一种高机动性、高适应性的液压动力自主轮腿机器人系统——WLR-3P机器人,这款机器人可以在平坦路面快速高效移动,在崎岖的地形环境中适应性也是杠杠的。
该项研究以论文(Design and Control for WLR-3P: A Hydraulic Wheel-Legged Robot)为题发表于中国科技期刊卓越行动计划高起点新刊Cyborg and Bionic Systems中。
论文地址戳→https://spj.science.org/doi/10.34133/cbsystems.0025
▍揭开WLR-3P机器人的神秘面纱
先来看看WLR-3P长什么样子:

作为一种新型无软管液压轮腿机器人,WLR-3P能够通过自主动力进行跳跃和快速移动。
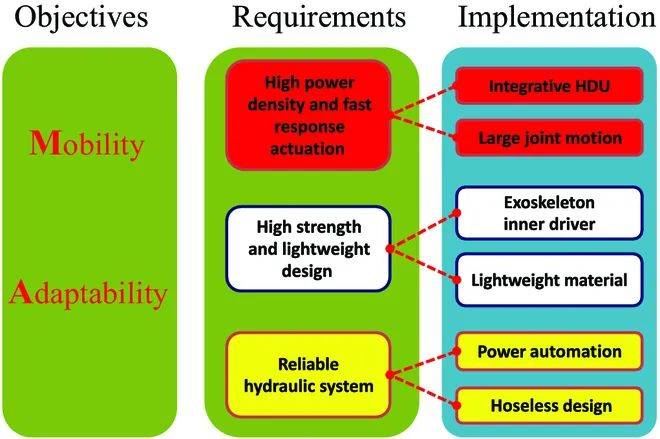
那么研究人员们是如何提高机器人的机动性和环境适应性呢?主要靠这三点:(a)高功率密度和快速响应驱动,(b)重量轻、惯性大、强度高,(c)可靠的液压系统。
WLR-3P的机械设计方法可以进行改写
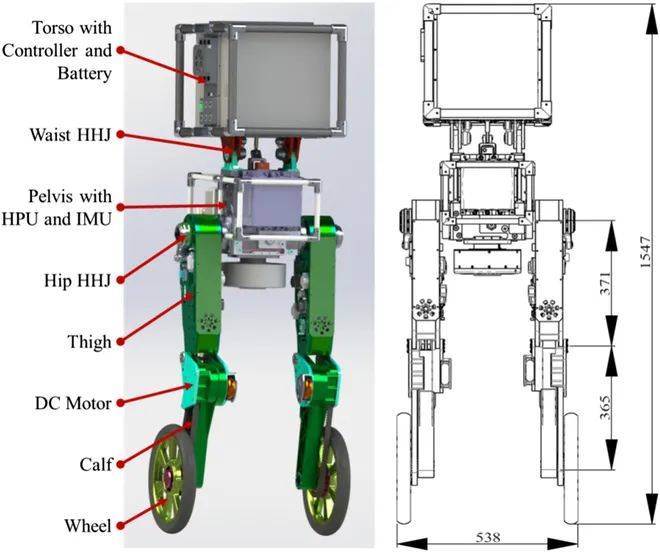
WLR-3P 的组件组成和尺寸
如上图所示,WLR-3P 有 7 个自由度 (DOF):每条腿 3 个自由度,腰部 1 个自由度。腿部的3个自由度分别在髋关节、膝关节和驱动轮上,其中髋关节和膝关节由HDU驱动,驱动轮由直流电机驱动。
HDU包括定制的高频响应(20Hz)伺服缸、高性能伺服阀、位移传感器和力传感器。WLR-3P重80公斤,配备机载HPU和电池。最大高度为1.55米,两个轮子之间的距离约为0.54米。此外,为了安全起见,机器人还“背负”着1.8公斤的碳纤维混合铝合金框架
至于为什么选择液压?简单粗暴地来说,采用集成液压驱动装置的机器人,功率密度高,驱动响应快。
▍WLR-3P的先进设计和控制策略
研究人员考虑到以下因素:(a)高功率重量比,(b)出色的抗冲击性,(c)力/位置控制的高频响应,以及(d) 与人类可比的生物学特性。
WLR-3P中膝关节液压驱动单元(HDU)的最大功率密度可达7kW/kg左右,远高于传统电机。 重写后的内容:WLR-3P中膝关节液压驱动单元(HDU)的最大功率密度约为7千瓦/千克,远远超过传统电机
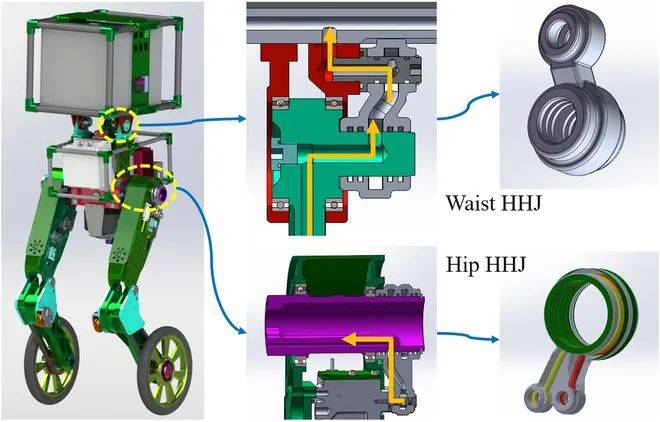
WLR-3P的臀部和腰部HHJ
液压动力单元(HPU)的小型化和集成化是液压机器人研究领域的主要难点,主要是由于泵和发动机以及系统加热的小型化。由于WLR-3P没有很大的HPU安装空间。研发人员们提出了一种创新的设计思路来实现HPU的小型化和集成化。
首先,齿轮泵由定制的外转子电机通过微联轴器驱动。来自泵的高压油经过微型蓄能器和过滤器,提供系统所需的液压动力。其次,针对系统的发热问题,设计了集散热、过滤、稳压于一体的多功能油箱。最终HPU可输出最大压力为21 MPa、流量为20 l/min的液压动力。
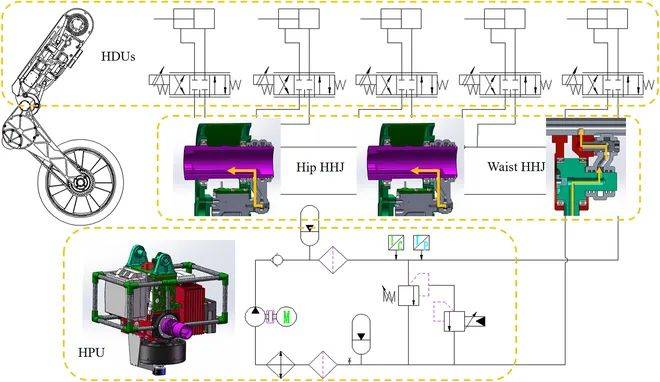
液压系统的液压原理图需要完整
下图展示了HPU的结构和组成。HPU的小型化、集成化使机器人摆脱了橡胶软管的限制,使机器人的运动更加“丝滑”。
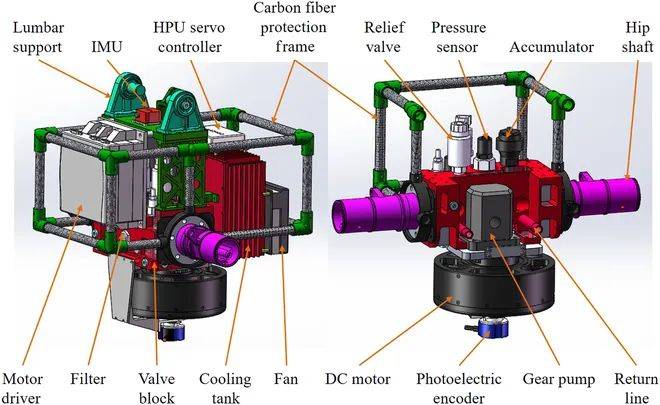
HPU的结构和组成,也是WLR-3P的骨盆
此外,研发团队还提出了包括分层分布式电气系统和控制策略的控制系统:
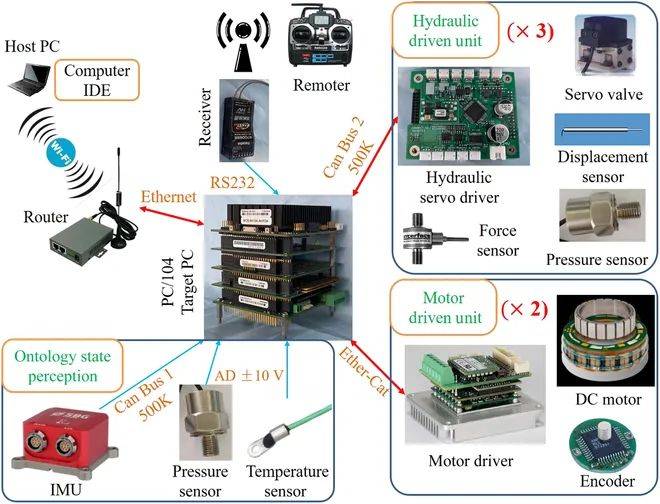
需要被重写的内容是:WLR-3P的电子系统
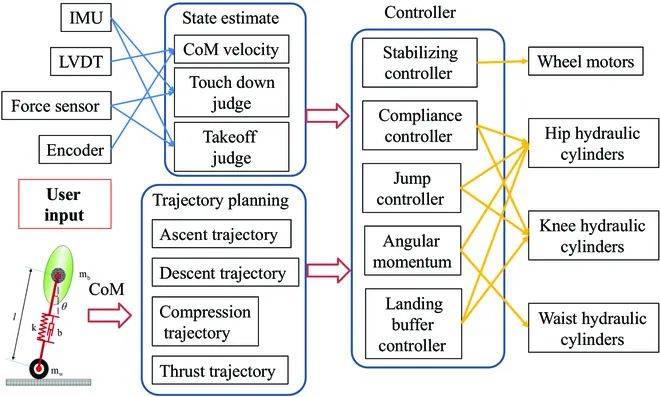
WLR-3P 的控制框架
需要进行重写的内容是:▍对WLR-3P进行平衡和爆发力测试
研究人员们围绕平衡性能和爆发力两方面展开了测试。快速移动和下蹲是验证轮腿机器人平衡性能的最基本动作。当快速移动时,机器人的质心(COM)在水平方向上快速变化,而蹲下时COM在垂直方向上快速变化。
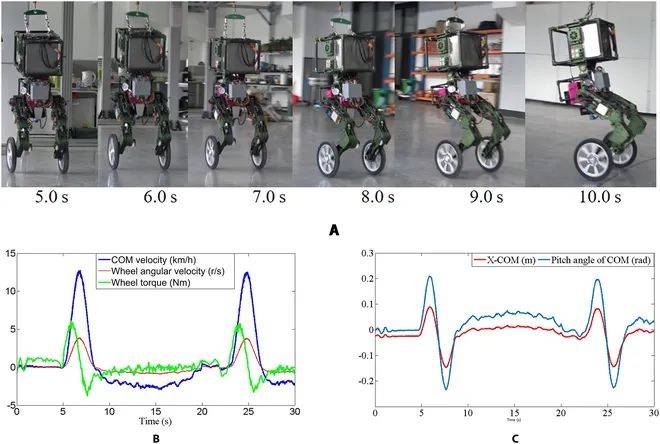
快速移动测试
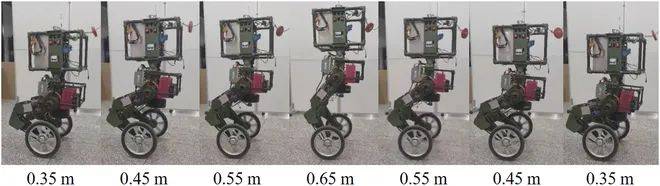
COM在0.35和0.65 m高度范围内的深蹲快照
测试显示,WLR-3P水平和垂直平衡能力OK,也验证了该机器人硬件系统的可靠性。
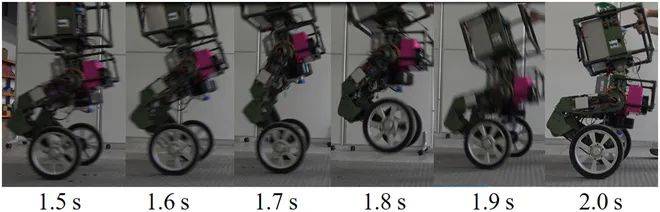
WLR-3P能够在0.5秒内完成起飞、飞行和着陆过程
实验结果显示,机器人WLR-3P可以达到13.6 km/h的速度和0.2 m的跳跃高度。液压驱动和机器人的结构设定得到了充分的认证。

研究人员们总结实验经验发现,机器人重量越轻、驱动系统爆发能力越强,机器人能跳得越高。特别是腿部重量占全身重量的比例越小,膝关节的瞬时输出力和速度就越高,这对机器人的跳跃性能会有更显着的影响。
需要被改写的内容是:▍WLR-3P的两位“哥哥”
团队表示,尽管实际性能与理论设计性能之间仍然存在一定的差距,但这也为未来的工作指明了方向
在2017年,团队已经开发了第一台液压轮腿机器人WLR-I,并成功验证了其集成设计和复合运动能力。随后在2018年,第二代轮腿机器人WLR-II问世,首次实现了无软管设计,并展现出了出乎意料的地形适应性
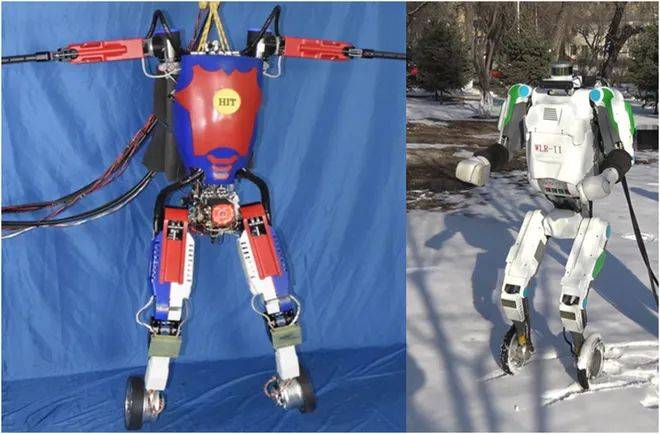
两个哥哥正在进行关节运动和雪地移动测试
如上图所示,前两代机器人其实已经验证了对复杂地形的适应性和平地上的机动性,但均由外部泵站提供动力。此次WLR-3P在前两代轮腿机器人的设计基础上进行了实质性改进。不仅提高了运动能力,还实现了动力自主。
接下来,团队还要考虑如何匹配HPU的输出功率和HDU所需的功率。对于驱动功率和机器人运动的需求,需要考虑散热、噪声等工程问题。更重要的是,液压元件的小型化和定制化也是未来的研究方向之一。
不得不说,效率太高。那就废话不多说,蹲一个,等WLR四弟吧。
以上是哈工大的这款轮腿机器人出3.0版本了!揭秘其设计、控制和性能测试的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 小红书开始测试AI聊天机器人'达芬奇”
Jan 15, 2024 pm 12:42 PM
小红书开始测试AI聊天机器人'达芬奇”
Jan 15, 2024 pm 12:42 PM
小红书正在努力通过增加更多的人工智能功能来丰富其产品根据国内媒体报道,小红书正在其主App中内测一款名为“Davinci”的AI应用。据悉,该应用能够为用户提供智能问答等AI聊天服务,其中包括旅游攻略、美食攻略、地理文化常识、生活技巧、个人成长和心理建设等等据报道,"Davinci"是使用Meta旗下的LLAMA模型进行训练的产品,该产品从今年9月开始测试至今。有传言称,小红书之前还在进行一项群AI对话功能的内测。在这个功能下,用户可以在群聊中创建或引入AI角色,并与其进行对话和互动图片来源:T
 解决C++代码中出现的'error: expected primary-expression before ')' token”问题
Aug 27, 2023 pm 12:28 PM
解决C++代码中出现的'error: expected primary-expression before ')' token”问题
Aug 27, 2023 pm 12:28 PM
解决C++代码中出现的“error:expectedprimary-expressionbefore')'token”问题在C++编程中,我们有时会遇到一些错误提示,比如“expectedprimary-expressionbefore')'token”。这个错误通常是因为代码中使用了错误的语法或表达式,导致编译器无法理解代码的含义。本文将
 win11网络连接里面一片空白怎么回事
Jan 11, 2024 pm 06:21 PM
win11网络连接里面一片空白怎么回事
Jan 11, 2024 pm 06:21 PM
有部分用户在尝试修改网络连接方式的途中,意外地发现在切换过程中所打开的网络适配器内空无一物,导致他们无法顺利实现切换操作。面对这样的困境,我们该如何解决这一难题呢?win11网络连接里面一片空白怎么回事1、驱动问题电脑上配备的网络适配器驱动与当前环境或版本不相容甚至显得过于陈旧解决方法:进行相应的网络适配器驱动升级或者重新安装。2、硬件问题网络适配器硬件存在物理性损伤甚至是完全失效状态。解决方法:将原来的网络适配器硬件进行更换。3、系统设置问题电脑上的Win11系统设置出现失误解决方法:我们可以
 联想Win10防火墙怎么关闭联想Win10防火墙关闭方法介绍
Jul 13, 2023 pm 01:33 PM
联想Win10防火墙怎么关闭联想Win10防火墙关闭方法介绍
Jul 13, 2023 pm 01:33 PM
联想Win10防火墙怎么关闭?防火墙可以为用户提供更好、更安全的计算机网络使用体验,最近有用户问联想Win10电脑防火墙怎么关闭,其实方法很简单,下面和小编一起来看看操作方法吧!联想Win10防火墙关闭方法介绍1、点击设置,输入“控制面板”,打开“控制面板”。2、找到“windows防火墙”。3、点击“启动或者关闭windowsdefender防火墙”。4、选择关闭,确定就可以了。
 C++在嵌入式系统开发中的多任务处理与调度功能实现技巧
Aug 27, 2023 pm 03:42 PM
C++在嵌入式系统开发中的多任务处理与调度功能实现技巧
Aug 27, 2023 pm 03:42 PM
C++在嵌入式系统开发中的多任务处理与调度功能实现技巧嵌入式系统是指被嵌入到其他设备中,并担任特定功能的计算机系统。这些系统通常需要同时处理多个任务,并对任务进行灵活的调度。在嵌入式系统开发中,C++是一种广泛使用的编程语言,它提供了许多强大的功能来满足多任务处理和调度的需求。本文将介绍C++在嵌入式系统中实现多任务处理与调度的一些技巧,并通过代码示例进行说
 电脑c盘满了怎么清理win7系统
Jul 09, 2023 pm 04:05 PM
电脑c盘满了怎么清理win7系统
Jul 09, 2023 pm 04:05 PM
运行win7系统一段时间后,发现c盘空间越来越小了,c盘空间大小关系着系统运行速度的快慢。有些用户遇到win7系统c盘突然爆满的情况怎么办呢?下面就教大家win7电脑清理c盘的方法吧。1、对C盘单击右键—属性,出来如下画面,单击磁盘清理。2、出来如下画面,把所有都勾选,点击确定,直接清理。3、计算机右键—属性—系统保护,单击配置,然后选择删除即可。4、把选项卡切换到高级,单击设置。5、设置虚拟内存,单击更改。6、取消自动管理所有驱动器的分页文件大小勾选,然后选中C盘,选择无分页文件,将虚拟内存设
 windows7控制面板在哪里打开windows7控制面板打开部位详细介绍
Jul 09, 2023 pm 12:45 PM
windows7控制面板在哪里打开windows7控制面板打开部位详细介绍
Jul 09, 2023 pm 12:45 PM
许多客户不清楚windows7控制面板在哪里打开,实际上要想打开windows7计算机的控制面板是非常简单的,最先大家鼠标右键点击打开计算机的属性页面,在页面中就可以见到控制面板,点击打开就可以,打开windows7控制面板就可以进行一系列的设定,让计算机操作下去更为温馨随手的呀。windows7控制面板打开部位详细介绍1、右键单击电子计算机电脑桌面图标2、点一下【属性】3、点一下计算机属性所属文件目录的【控制面板】4、就可以打开控制面板设定页面
 JavaScript函数模板引擎:动态生成HTML的利器
Nov 18, 2023 pm 12:41 PM
JavaScript函数模板引擎:动态生成HTML的利器
Nov 18, 2023 pm 12:41 PM
JavaScript函数模板引擎:动态生成HTML的利器在前端开发中,动态生成HTML是一个常见的需求,例如:根据用户输入的信息展示搜索结果、根据后台传入的数据动态渲染页面等等。在传统的前端开发中,我们通常会采用字符串拼接的方式来生成动态的HTML代码。但是这种方式有很多限制,例如:可读性差、易于出错、难以维护等。而JavaScript函数模板引擎则可以很好
