

用于激光雷达点云自监督预训练SOTA!

论文思路:
masked autoencoding已经成为文本、图像和最近的点云的Transformer模型的一个成功的预训练范例。原始的汽车数据集适合进行自监督的预训练,因为与3D目标检测(OD)等任务的标注相比,它们的收集成本通常较低。然而,针对点云的masked autoencoders的开发仅仅集中在合成和室内数据上。因此,现有的方法已经将它们的表示和模型定制为小而稠密的点云,具有均匀的点密度。在这项工作中,本文研究了在汽车设置中对点云进行的masked autoencoding,这些点云是稀疏的,并且在同一场景中,点云的密度在不同的物体之间可以有很大的变化。为此,本文提出了Voxel-MAE,这是一种为体素表示而设计的简单的masked autoencoding预训练方案。本文对基于Transformer三维目标检测器的主干进行了预训练,以重建masked体素并区分空体素和非空体素。本文的方法提高了具有挑战性的nuScenes数据集上1.75 mAP和1.05 NDS的3D OD性能。此外,本文表明,通过使用Voxel-MAE进行预训练,本文只需要40%的带注释数据就可以超过随机初始化的等效数据。
主要贡献:
本文提出了Voxel-MAE(一种在体素化的点云上部署MAE-style的自监督预训练的方法),并在大型汽车点云数据集nuScenes上对其进行了评估。本文的方法是第一个使用汽车点云Transformer主干的自监督预训练方案。
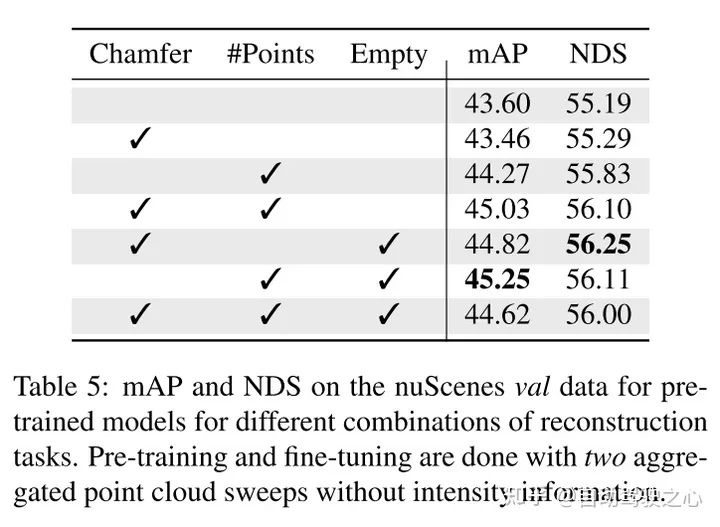
本文针对体素表示定制本文的方法,并使用一组独特的重建任务来捕捉体素化点云的特征。
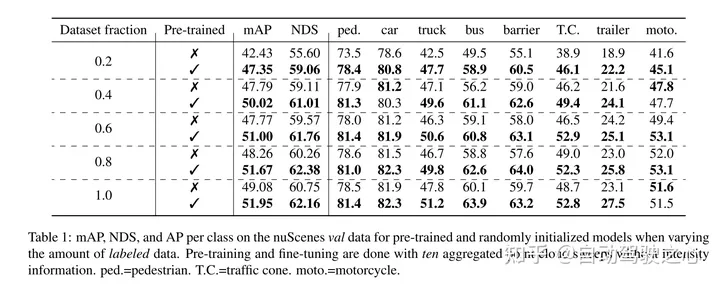
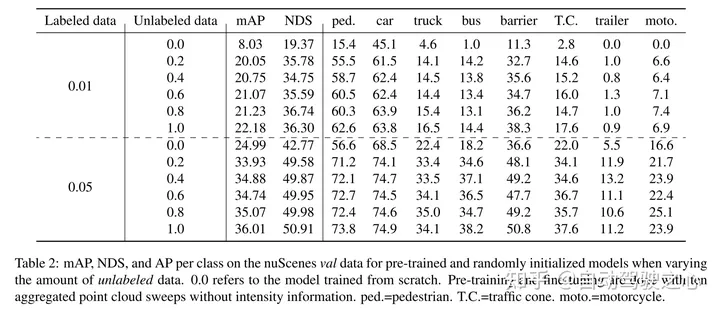
本文证明了本文的方法数据高效,并且减少了对带注释数据的需求。通过预训练,当只使用40%的带注释的数据时,本文的性能优于全监督的数据。
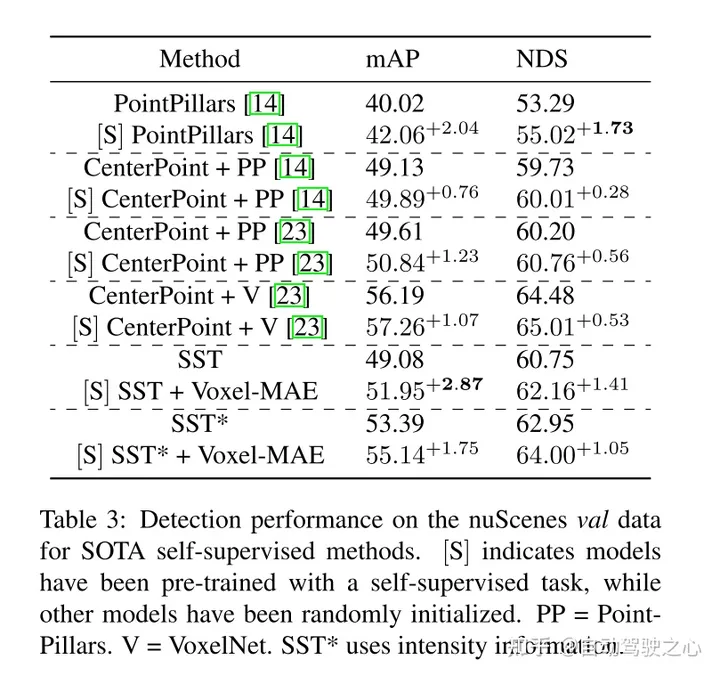
此外,本文发现Voxel-MAE在mAP中将基于Transformer检测器的性能提高了1.75个百分点,在NDS中将其性能提高了1.05个百分点,与现有的自监督方法相比,其性能提高了2倍。
网络设计:
这项工作的目的是将MAE-style的预训练扩展到体素化的点云。核心思想仍然是使用编码器从对输入的部分观察中创建丰富的潜在表示,然后使用解码器重构原始输入,如图2所示。经过预训练后,编码器被用作3D目标检测器的主干。但是,由于图像和点云之间的基本差异,需要对Voxel-MAE的有效训练进行一些修改。
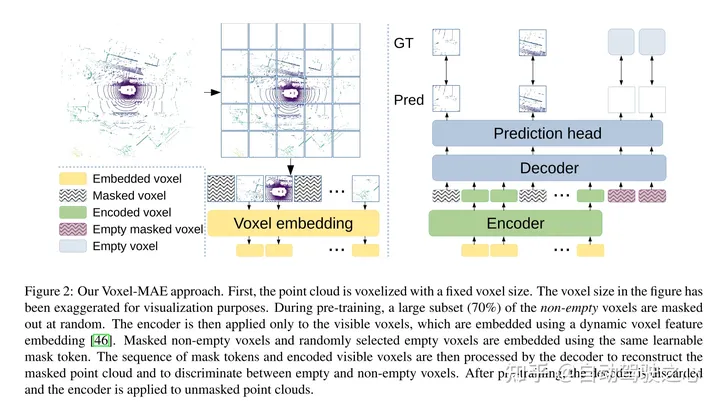
图2:本文的Voxel-MAE方法。首先,用固定的体素大小对点云进行体素化。图中的体素大小已被夸大,以实现可视化的目的。在训练前,很大一部分(70%)的非空体素被随机mask掉了。然后,编码器只应用于可见体素,使用嵌入[46]的动态体素特征嵌入这些体素。masked非空体素和随机选择的空体素使用相同的可学习mask tokens嵌入。然后,解码器对mask tokens序列和编码的可见体素序列进行处理,以重构masked点云并区分空体素和非空体素。在预训练之后,丢弃解码器,并将编码器应用于unmasked点云。
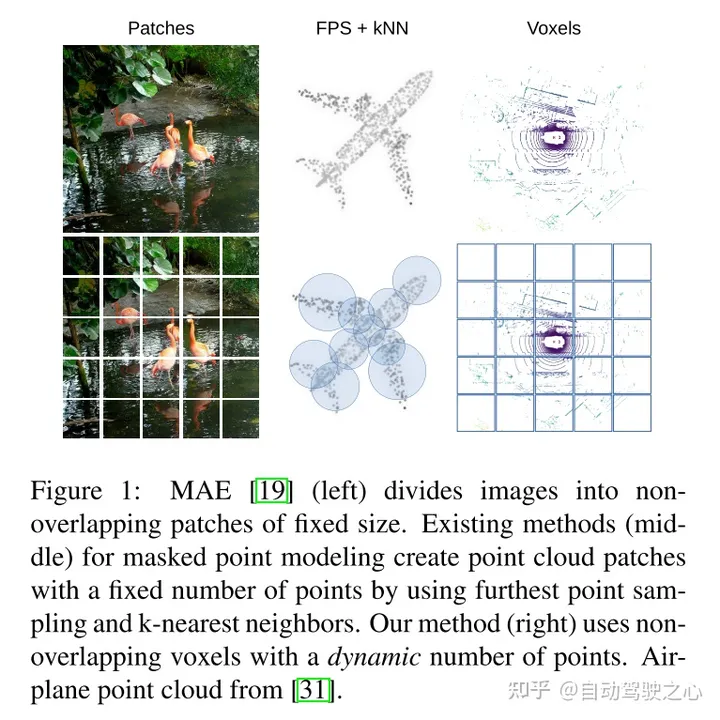
图1:MAE(左)将图像划分为固定大小的不重叠的patches。现有的masked点建模方法(中)通过使用最远点采样和k近邻创建固定数量的点云patches。本文的方法(右)使用非重叠体素和动态数量的点。
实验结果:
引用:
Hess G、Jaxing J、Svensson E 等人。用于激光雷达点云自监督预训练的掩码自动编码器[C]//IEEE/CVF 计算机视觉应用冬季会议论文集。 2023:350-359.
以上是用于激光雷达点云自监督预训练SOTA!的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 Stable Diffusion 3论文终于发布,架构细节大揭秘,对复现Sora有帮助?
Mar 06, 2024 pm 05:34 PM
Stable Diffusion 3论文终于发布,架构细节大揭秘,对复现Sora有帮助?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3的论文终于来了!这个模型于两周前发布,采用了与Sora相同的DiT(DiffusionTransformer)架构,一经发布就引起了不小的轰动。与之前版本相比,StableDiffusion3生成的图质量有了显着提升,现在支持多主题提示,并且文字书写效果也得到了改善,不再出现乱码情况。 StabilityAI指出,StableDiffusion3是一个系列模型,其参数量从800M到8B不等。这一参数范围意味着该模型可以在许多便携设备上直接运行,从而显着降低了使用AI
 你是否真正掌握了坐标系转换?自动驾驶离不开的多传感器问题
Oct 12, 2023 am 11:21 AM
你是否真正掌握了坐标系转换?自动驾驶离不开的多传感器问题
Oct 12, 2023 am 11:21 AM
一先导与重点文章主要介绍自动驾驶技术中几种常用的坐标系统,以及他们之间如何完成关联和转换,最终构建出统一的环境模型。这里重点理解自车到相机刚体转换(外参),相机到图像转换(内参),图像到像素有单位转换。3d向2d转换会有相应的畸变,平移等。重点:自车坐标系相机机体坐标系需要被重写的是:平面坐标系像素坐标系难点:要考虑图像畸变,去畸变和加畸变都是在像平面上去补偿二简介视觉系统一共有四个坐标系:像素平面坐标系(u,v)、图像坐标系(x,y)、相机坐标系()和世界坐标系()。每种坐标系之间均存在联系,
 自动驾驶与轨迹预测看这一篇就够了!
Feb 28, 2024 pm 07:20 PM
自动驾驶与轨迹预测看这一篇就够了!
Feb 28, 2024 pm 07:20 PM
轨迹预测在自动驾驶中承担着重要的角色,自动驾驶轨迹预测是指通过分析车辆行驶过程中的各种数据,预测车辆未来的行驶轨迹。作为自动驾驶的核心模块,轨迹预测的质量对于下游的规划控制至关重要。轨迹预测任务技术栈丰富,需要熟悉自动驾驶动/静态感知、高精地图、车道线、神经网络架构(CNN&GNN&Transformer)技能等,入门难度很大!很多粉丝期望能够尽快上手轨迹预测,少踩坑,今天就为大家盘点下轨迹预测常见的一些问题和入门学习方法!入门相关知识1.预习的论文有没有切入顺序?A:先看survey,p
 DualBEV:大幅超越BEVFormer、BEVDet4D,开卷!
Mar 21, 2024 pm 05:21 PM
DualBEV:大幅超越BEVFormer、BEVDet4D,开卷!
Mar 21, 2024 pm 05:21 PM
这篇论文探讨了在自动驾驶中,从不同视角(如透视图和鸟瞰图)准确检测物体的问题,特别是如何有效地从透视图(PV)到鸟瞰图(BEV)空间转换特征,这一转换是通过视觉转换(VT)模块实施的。现有的方法大致分为两种策略:2D到3D和3D到2D转换。2D到3D的方法通过预测深度概率来提升密集的2D特征,但深度预测的固有不确定性,尤其是在远处区域,可能会引入不准确性。而3D到2D的方法通常使用3D查询来采样2D特征,并通过Transformer学习3D和2D特征之间对应关系的注意力权重,这增加了计算和部署的
 首个多视角自动驾驶场景视频生成世界模型 | DrivingDiffusion: BEV数据和仿真新思路
Oct 23, 2023 am 11:13 AM
首个多视角自动驾驶场景视频生成世界模型 | DrivingDiffusion: BEV数据和仿真新思路
Oct 23, 2023 am 11:13 AM
笔者的一些个人思考在自动驾驶领域,随着BEV-based子任务/端到端方案的发展,高质量的多视图训练数据和相应的仿真场景构建愈发重要。针对当下任务的痛点,“高质量”可以解耦成三个方面:不同维度上的长尾场景:如障碍物数据中近距离的车辆以及切车过程中精准的朝向角,以及车道线数据中不同曲率的弯道或较难采集的匝道/汇入/合流等场景。这些往往靠大量的数据采集和复杂的数据挖掘策略,成本高昂。3D真值-图像的高度一致:当下的BEV数据获取往往受到传感器安装/标定,高精地图以及重建算法本身的误差影响。这导致了我
 GSLAM | 一个通用的SLAM架构和基准
Oct 20, 2023 am 11:37 AM
GSLAM | 一个通用的SLAM架构和基准
Oct 20, 2023 am 11:37 AM
突然发现了一篇19年的论文GSLAM:AGeneralSLAMFrameworkandBenchmark开源代码:https://github.com/zdzhaoyong/GSLAM直接上全文,感受这项工作的质量吧~1摘要SLAM技术最近取得了许多成功,并吸引了高科技公司的关注。然而,如何同一现有或新兴算法的界面,一级有效地进行关于速度、稳健性和可移植性的基准测试仍然是问题。本文,提出了一个名为GSLAM的新型SLAM平台,它不仅提供评估功能,还为研究人员提供了快速开发自己的SLAM系统的有用
 轻松拿捏 4K 高清图像理解!这个多模态大模型自动分析网页海报内容,打工人简直不要太方便
Apr 23, 2024 am 08:04 AM
轻松拿捏 4K 高清图像理解!这个多模态大模型自动分析网页海报内容,打工人简直不要太方便
Apr 23, 2024 am 08:04 AM
一个可以自动分析PDF、网页、海报、Excel图表内容的大模型,对于打工人来说简直不要太方便。上海AILab,香港中文大学等研究机构提出的InternLM-XComposer2-4KHD(简写为IXC2-4KHD)模型让这成为了现实。相比于其他多模态大模型不超过1500x1500的分辨率限制,该工作将多模态大模型的最大输入图像提升到超过4K(3840x1600)分辨率,并支持任意长宽比和336像素~4K动态分辨率变化。发布三天,该模型就登顶HuggingFace视觉问答模型热度榜单第一。轻松拿捏
 《我的世界》化身AI小镇,NPC居民角色扮演如同真人
Jan 02, 2024 pm 06:25 PM
《我的世界》化身AI小镇,NPC居民角色扮演如同真人
Jan 02, 2024 pm 06:25 PM
请留意,这个方块人正在紧锁眉头,思考着面前几位“不速之客”的身份。原来她陷入了危险境地,意识到这一点后,她迅速展开脑力搜索,寻找解决问题的策略。最终,她决定先逃离现场,然后尽快寻求帮助,并立即采取行动。与此同时,对面的人也在进行着与她相同的思考……在《我的世界》中出现了这样一个场景,所有的角色都由人工智能控制。他们每个人都有着独特的身份设定,比如之前提到的女孩就是一个年仅17岁但聪明勇敢的快递员。他们拥有记忆和思考能力,在这个以《我的世界》为背景的小镇中像人类一样生活。驱动他们的,是一款全新的、
