

微软提出预测铰接对象姿态技术,用于AR/VR身体姿态捕捉的专利

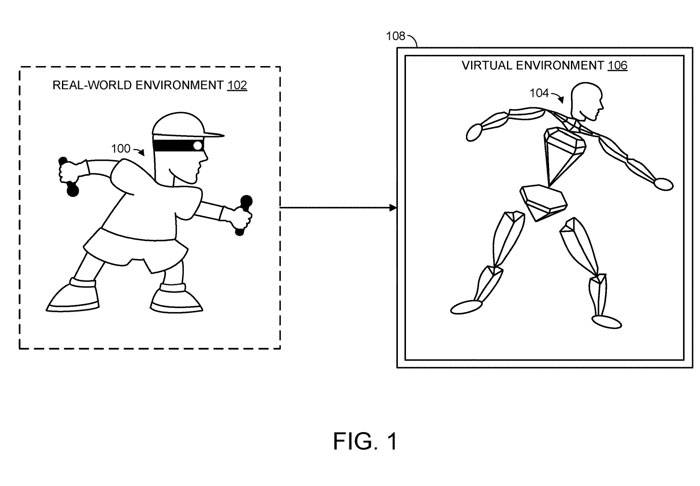
(映维网Nweon 2023年09月18日)为了准确地表示人类用户的真实世界姿态,通常需要相对详细的关于用户身体部位位置和方向的信息,但这些信息并不总是可用。例如,当使用头戴式设备提供虚拟现实体验时,系统可能只能获取与用户头部和手部相关的空间信息。然而,在大多数情况下,这是不足以准确地重现人类用户的真实姿态的
所以在名为“Pose prediction for articulated object”的专利申请中,微软提出了一种预测铰接对象的姿态的技术。特别地,机器学习模型接收到铰接对象的n个不同关节的空间信息,其中n个关节小于铰接对象的所有关节。
在人类用户的情况下,n个关节可以包括人类用户的头部关节和/或一个或两个手腕关节,它们与详细说明用户头部和/或手的参数的空间信息相关联
机器学习模型已训练为接收铰接对象的n+m个关节的输入空间信息,其中m大于等于1。例如,在初始训练期间,机器学习模型会接收到与铰接对象的几乎所有关节相对应的输入数据。所述n+m个关节可包括所铰接对象的每一个关节。
在其他示例中,可能存在少于铰接对象的所有关节的情况下,有n+m个关节。在训练过程中,输入给机器学习模型的数据可能会逐渐被隐藏。可以用预定义的值来替换特定节点在m个节点中对应的输入数据,或者干脆省略
换句话说,机器学习模型训练成基于关于铰接对象的各种可移动部分的位置/方向的逐渐减少的信息来准确预测铰接对象的姿态。
使用这种方法,机器学习模型能够在运行时准确预测铰接物体的姿态,而且只需稀疏的输入数据。微软指出,这项技术可以精确地再现人类用户铰接物体在真实世界中的姿态,而无需大量关于每个关节方向的信息
换句话说,通过更准确地再现人类用户的真实世界姿势,发明可以提供改进人机交互的技术优势。这些技术优势包括提高虚拟现实体验的沉浸感,以及提高手势识别系统的准确性
另外,所述技术可以通过减少必须作为姿态预测过程的输入而收集的数据量,从而在准确地重现人类用户的真实姿态的同时减少计算资源的消耗。
示例方法200展示了用于预测铰接对象姿态的图2
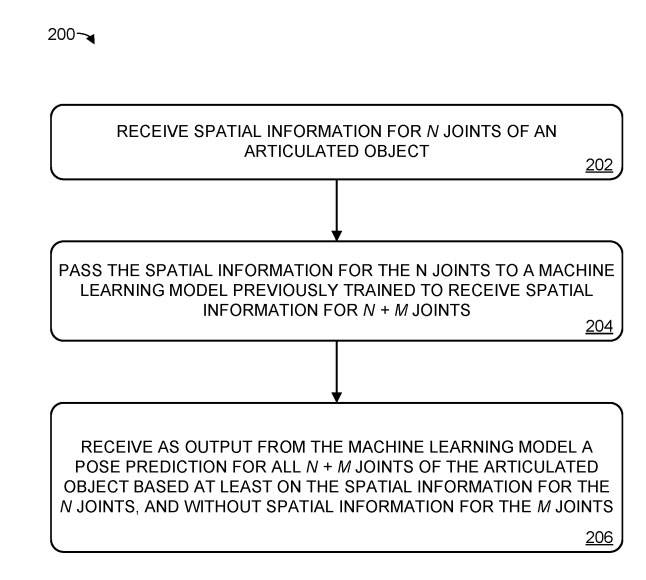
在第202处,接收n个关节的空间信息,这些关节是用于铰接对象的。系统接收到铰接对象的n个关节的空间信息,其中包含的关节数量少于铰接对象的所有关节。将关节的空间信息表示为连接身体部分的六个自由度的位置和方向,这可以用来推断关节的状态
作为一个示例,所述n个关节可包括人体的头部关节,所述头部关节的空间信息可详细描述人体头部的参数。另外,所述n个关节可包括人体的一个或多个腕关节,所述一个或多个腕关节的空间信息可详细描述人体的一只或多只手的参数。
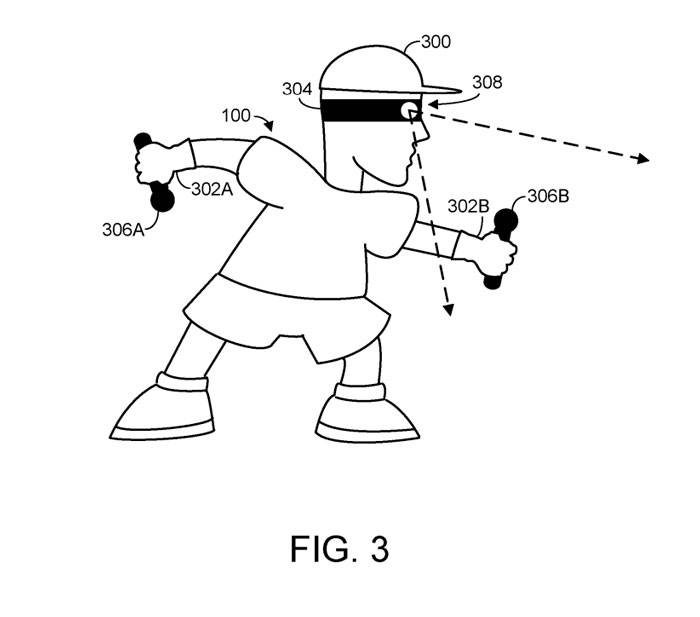
图3显示了人类用户。人类用户有一个头300和两只手302A和302B。计算系统可以接收人类用户的一个或多个关节的空间信息,其可以包括头部和/或手腕关节。
所述铰接对象的n个关节的空间信息可由一个或多个传感器输出的定位数据导出。传感器可以集成到一个或多个由人类用户的相应身体部位持有或佩戴的设备之中。
例如,传感器可以包括一个或多个集成到头戴式显示设备和/或手持控制器中的惯性测量单元。作为另一个例子,传感器可以包括一个或多个摄像头。
图3示意性地说明了不同类型的传感器,其中来自传感器的输出可以包括或可用于导出空间信息。具体地,人类用户在其头部300佩戴头戴式显示设备304。
另外,人类用户手持位置传感器306A和306B,所述位置传感器可配置为检测并向头显 304和/或配置为接收空间信息的另一计算系统报告用户手部的运动。
在图2中,我们回到了204的情境。我们将n个关节的空间信息传递给之前进行过训练的机器学习模型。这个模型接收n+m个关节的空间信息作为输入,其中m的值大于等于1。换句话说,相较于之前的训练模型,这个机器学习模型接收的关节空间信息要少一些
在206中,从机器学习模型接收作为输出的关节对象的姿态预测,所述预测至少基于n个关节的空间信息,并且不包含它们的关节的空间信息。换句话说,即便没有提供m个关节的空间信息,机器学习模型都可以预测关节对象的完整姿态。
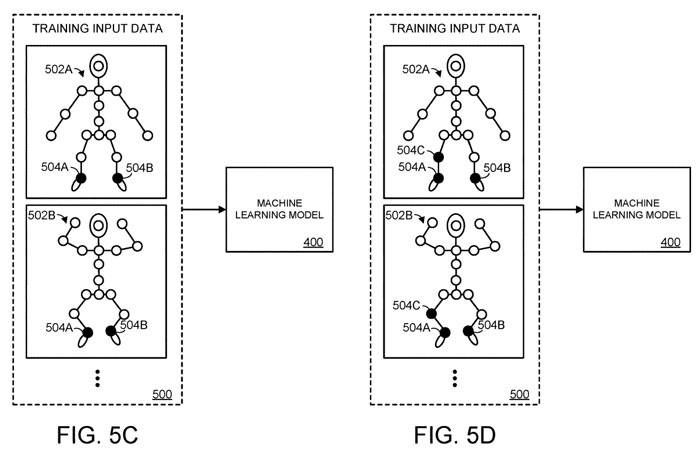
示意图4展示了一个示例机器学习模型400,以说明这个过程
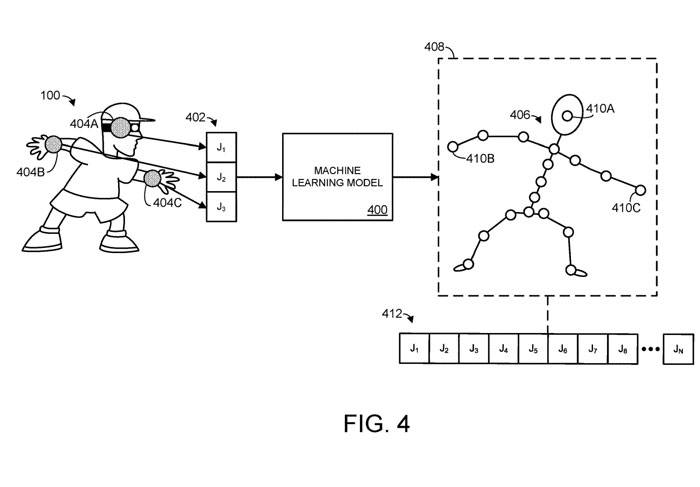
在图4中,机器学习模型接收到空间信息402,对应三个不同的关节J1、J2、J3。关节的空间信息可以采用任何合适的计算机数据的形式,而所述数据指定或可用于导出与关节相连的身体部位的位置和/或方向。
例如,空间信息可以直接指定身体部位的位置和方向,和/或空间信息可以指定关节相对于一个或多个旋转轴的一个或多个旋转。在图4中,关节J1、J2、J3对应于人类用户的头部关节404A和两个手腕关节404B/404C,如图用户身体上叠加的阴影圆圈所示。
在本例中,n个关节包括三个关节,分别对应人体的头部和手腕关节。基于所述输入空间信息402,所述机器学习模型输出所述铰接对象的预测位姿406。
另外,机器学习模型可以输出与虚拟铰接表示的关节相对应的预测空间信息。人类用户可以由具有卡通或非人类比例的虚拟化身Avatar表示。例如,预测的空间信息可能对应于SMPL表示的关节。
换句话说,铰接表示的虚拟表示的关节不必与铰接对象的关节具有1:1的对应关系。因此,机器学习模型预测的空间信息输出可以是针对与铰接对象的n+m个关节不直接对应的关节。例如,虚拟表示可能比铰接对象具有更少的脊柱关节。
机器学习模型可以用任何合适的方式进行训练。在一个实施例中,机器学习模型可能先前使用具有铰接对象的ground truth标签的训练输入数据进行训练。
换句话说,可以为机器学习模型提供铰接对象关节的训练空间信息,并标记为指定空间信息所对应的铰接对象的实际姿态的ground truth标签。
如上所述,可以训练机器学习模型以接收n+m个关节的空间信息作为输入。这包括,在第一次训练迭代中,为机器学习模型提供所有n+m个关节的训练输入数据。在随后的一系列训练迭代中,m个关节的训练输入数据可以逐渐被屏蔽。
例如,在第二次训练迭代中,m个关节中的第一个关节可以被屏蔽,其中训练数据集中关节的空间信息替换为表示被屏蔽关节的预定义值,或者干脆省略。
作为示例。在第三次训练迭代中,m个关节中的第二个关节可以被屏蔽,以此类推,直到m个关节都被屏蔽,并且只向机器学习模型提供了n个关节的空间信息。
这一过程用图5a-5d说明。具体而言,在图5A中,为机器学习模型400提供了一个训练输入数据集。在本实施例中,训练输入数据包括与所述铰接对象的多个不同姿态相对应的空间信息,包括第一姿态502A和第二姿态502B。
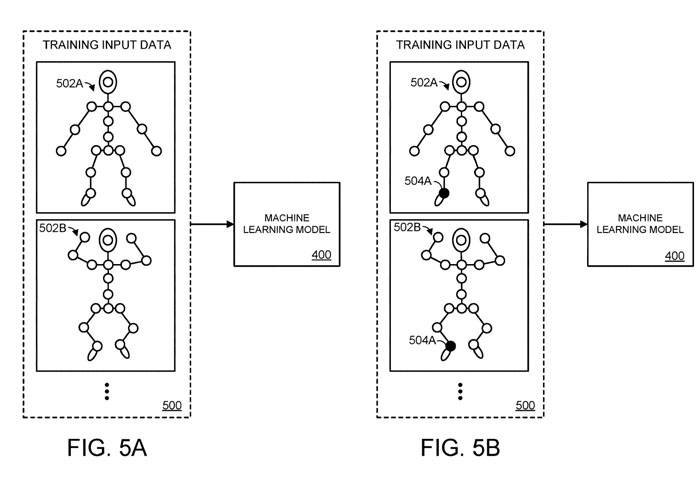
在图5A中,我们提供了n+m个关节的空间信息,用于机器学习模型的铰接对象。在人体的简化表示中,每个代表关节的圆圈都用白色填充模式来表示。然而,在图5B中,我们屏蔽了504A,如图所示,用黑色填充图案来表示接头504A的圆圈
换句话说,图5A表示了训练过程的初始迭代,其中提供了所有n+m个关节的空间信息给机器学习模型。而图5B则表示了训练过程的第二次迭代,其中屏蔽了m个关节中的第一个关节504A
在图5C中,所述铰接表示的m个关节中的第二关节504B被遮挡。同样,在图5D中,m个关节中的第三个关节被遮挡。可以持续进行多次训练迭代,直到m个关节中的每个关节的空间信息被屏蔽,并且只向机器学习模型提供n个关节的空间信息。
在上述场景中,我们描述了铰接对象为人体全身的情况。然而,铰接对象也可以采用其他形式
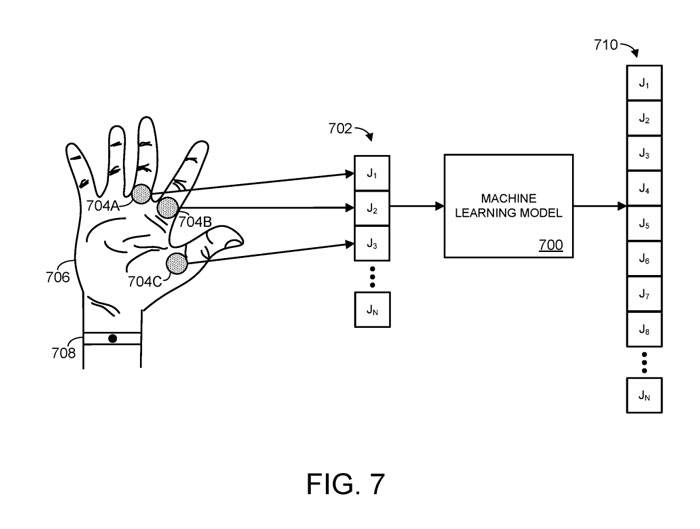
如图7所示,铰接对象是人手,而不是整个人体。具体而言,图7显示了一个示例机器学习模型700。
机器学习模型700接收关节J1、J2和J3的空间信息,它们对应于一个铰接物体的三个关节704A-C,在本例中采用人手706的形式。
在这种情况下,具体来说,n个关节包括人手的一个或多个手指关节。一个或多个手指关节的空间信息详细描述了人手的一个或多个手指或手指段的参数。例如,空间信息可以指定手的手指的位置/方向,和/或应用于手关节的旋转
可以使用任何合适的方法来收集关节空间信息,例如通过位置传感器708。举个例子,位置传感器可以采用配置为对手部进行成像的摄像头形式。另一个例子是,位置传感器可以包括适当的射频天线,其配置为将手部表面暴露在电磁场中,并评估导电人体皮肤的运动和接近对天线处电磁场阻抗的影响
根据输入的空间信息702,机器学习模型会输出一组预测的空间信息710。空间信息710可以用来构建预测的铰接对象的位姿。正如前面所述,这些空间信息可以表示铰接对象身体部位的位置和方向
相关专利:Microsoft Patent | Pose prediction for articulated object
微软最初在2022年6月提交了一份名为“Pose prediction for articulated object”的专利申请,并且该申请近日被美国专利商标局公布
以上是微软提出预测铰接对象姿态技术,用于AR/VR身体姿态捕捉的专利的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 苹果AIGC专利:可通过语音指令生成AR/VR虚拟场景
Jul 16, 2023 pm 05:49 PM
苹果AIGC专利:可通过语音指令生成AR/VR虚拟场景
Jul 16, 2023 pm 05:49 PM
去年2月,Meta曾展示过一种基于AIGC玩法的虚拟世界开发功能:BuilderBot,特点是可通过识别语音指令,就能在虚拟场景中生成对应的元素,可简化VR场景生成的难度。而在近期USPTO公布的一项苹果专利中,也指出了类似的概念,比如用户可命令Siri语音助手在物理场景中加入虚拟家具,并改变家具的颜色等等。据青亭网了解,该专利编号为US20230206912A1,内容主要描述了一系列新的Siri语音指令,可用来控制文字处理器(输入文字、修改字体等)、XR场景等等。虽然并非专为XR打造,但专利中
 配置Linux系统以支持AR/VR和增强现实开发
Jul 05, 2023 am 11:17 AM
配置Linux系统以支持AR/VR和增强现实开发
Jul 05, 2023 am 11:17 AM
配置Linux系统以支持AR/VR和增强现实开发引言:随着增强现实(AR)和虚拟现实(VR)技术的发展,越来越多的开发者开始关注这些新兴领域。为了进行AR/VR和增强现实开发,正确配置Linux系统非常重要。本文将为您介绍如何配置Linux系统以支持AR/VR和增强现实开发,并提供相应的代码示例。步骤一:安装必要的软件在开始之前,请确保您的Linux系统已经
 AR/VR方案商Vection收购VR零售方案商Invrsion
Jun 09, 2023 pm 10:19 PM
AR/VR方案商Vection收购VR零售方案商Invrsion
Jun 09, 2023 pm 10:19 PM
6月8日消息,AR/VR解决方案公司Vection宣布收购VR智能零售方案商Invrsion,旨在加速时尚、零售领域的XR解决方案和市场机会。据悉,收购完成后,Invrsion的技术将与Vection的INTEGRATEDXR套件集成,更好的满足客户的需求。据青亭网了解,Invrsion成立于2015年,此前专注于3D产品数字化业务,为客户提供基于6DoFVR的交互式模拟方案,应用场景包括虚拟展厅、3D电商、工业、房地产等等。客户方面,该公司曾服务于Walgreens、费列罗、雀巢、可口可乐、D
 微软专利为AR/VR光线投影校准干扰提出监控光源解决方案
Aug 25, 2023 pm 01:01 PM
微软专利为AR/VR光线投影校准干扰提出监控光源解决方案
Aug 25, 2023 pm 01:01 PM
(映维网Nweon2023年08月24日)XR设备通常包括耦合到左光束路径的左投影仪和耦合到右光束路径的右投影仪。左投影仪配置为生成左图像,然后将左图像通过左光束路径传播到用户的左眼。正确的投影仪被配置为生成正确的图像,然后正确的图像通过正确的光束路径传播到用户的右眼。这种XR设备的结构可能会因常规使用、温度变化和/或冲击而发生变化。当R设备的结构发生变化时,图像可能会失去视轴,无法正确对准。这个问题在眼镜形态的设备中可能会变得严重。有XR设备配置为投射校准图像,并使用校准图像来确定显示器是否正
 挖掘数百篇AR/VR专利,苹果XR全方位探索
Jun 03, 2023 pm 11:40 PM
挖掘数百篇AR/VR专利,苹果XR全方位探索
Jun 03, 2023 pm 11:40 PM
近期大家也看了很多苹果XR的消息,与其看各种爆料、不如从专利入手来看看苹果XR头显可能会有哪些不同的玩法。于是,我们就从苹果近年来有关AR/VR的数百篇专利中,选出可能会直接决定和影响XR产品体验的部分汇总出来。当然,这些专利不会集中在一款产品上,我们也无法准确告诉你苹果XR到底长啥样,但仍可透过专利窥探一二。在整理近年来苹果AR/VR专利时,主要发现以下几个特点:1)部分AR/VR专利来自此前收购的公司,比如PrimeSense、Metaio、NextVR、SMI、Spaces等等;2)结构光
 人工智能时代下设计行业的未来
Apr 10, 2023 am 09:51 AM
人工智能时代下设计行业的未来
Apr 10, 2023 am 09:51 AM
人工智能(AI)会接管设计工作吗?将来会取代设计师吗?一提到人工智能,马上就被描绘成人类的替代品。虽然毫无疑问,人工智能将改变设计工作现状,但这种智能技术将取代人类的想法并不完全准确。随着技术的发展和经济的变革,业务流程的变化是很自然的,设计工作过程也受此影响。当我们了解到人工智能将如何深刻地改变设计过程时,(设计师们)不要将人工智能视为威胁,而应该着眼于人工智能给设计领域带来的机遇,它对设计实践和设计原则的影响,以及设计师的工作将如何改变。AI在两种设计环境中的作用为了理解人工智能在设计中的
 美国为AR/VR开放6GHz频段,Meta、苹果、谷歌纷纷表示重要举措
Oct 20, 2023 am 11:25 AM
美国为AR/VR开放6GHz频段,Meta、苹果、谷歌纷纷表示重要举措
Oct 20, 2023 am 11:25 AM
(映维网Nweon2023年10月20日)根据CNBC,美国联邦通信委员会FCC日前同意为将6ghz频段开放给的“一类新型极低功耗设备”,例如说可穿戴设备,而这一举措将有助于为增强现实和虚拟现实可穿戴设备的新应用铺平道路。FCC在发言稿中指出,预计开放这一频段将“刺激发展一个尖端应用的生态系统,包括可穿戴技术、增强现实和虚拟现实,而这将有助于企业、增加学习机会、推进医疗保健机会,并带来新的娱乐体验。”对于这一消息,Meta率先表达了兴奋之情。这家公司的凯文·马丁(KevinMartin)在一份声
 苹果江郎才尽?前营销高管不看好苹果AR/VR头显。
May 26, 2023 pm 11:39 PM
苹果江郎才尽?前营销高管不看好苹果AR/VR头显。
May 26, 2023 pm 11:39 PM
果粉之家,专业苹果手机技术研究十年!您身边的苹果专家~苹果将在近段时间推出一款名为“RealityPro”的AR/VR头显,该消息早已不是秘密,不过随着发布日期逐渐临近,似乎越来越多人对这款混合现实产品不看好。其中就包括苹果内部人员,甚至就连苹果CEO蒂姆・库克(Timcook)对该项目的态度都显得不太积极。尽管VR头显公司Oculus的创始人帕尔默·勒基(PalmerLuckey)在体验了苹果头显后对该产品不吝赞美,但仍无法避免其他质疑的声音。近期,苹果公司前任营销高管迈克尔・加滕伯格(Mic
