

合成非模态感知数据集AmodalSynthDrive:用于自动驾驶的创新解决方案

- 论文链接:https://arxiv.org/pdf/2309.06547.pdf
- 数据集链接:http://amodalsynthdrive.cs.uni-freiburg.de
摘要
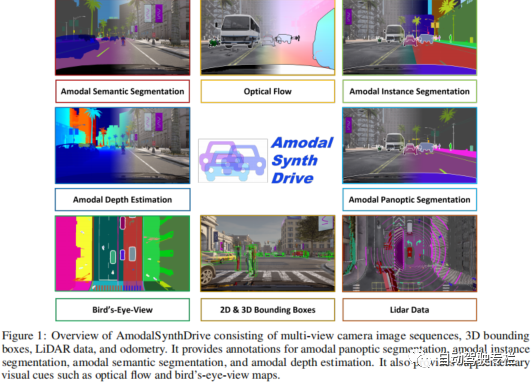
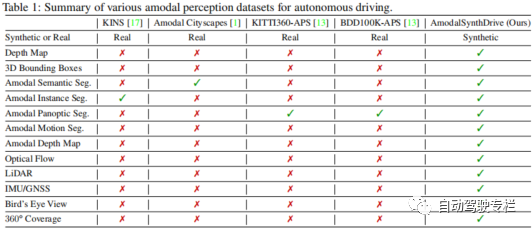
本文介绍了AmodalSynthDrive:一个用于自动驾驶的合成非模态感知数据集。与人类不同,即使在部分遮挡的情况下,人类也可以毫不费力地估计物体的整体,而现代计算机视觉算法仍然发现这一方面极具挑战性。由于缺乏合适的数据集,利用这种非模态感知进行自动驾驶在很大程度上仍未得到开发。这些数据集的生成主要受到昂贵标注成本的影响,以及需要减轻标注者在准确标注遮挡区域的主观性带来的干扰。为了解决这些限制,本文引入了AmodalSynthDrive,这是一种合成的多任务非模态感知数据集。该数据集提供了150个驾驶序列的多视图相机图像、3D边界框、激光雷达数据和里程计,其包括了在各种交通、天气和光照条件下超过1M的目标标注。AmodalSynthDrive支持多种非模态场景理解任务,包括引入的非模态深度估计用于增强空间理解。本文为每项任务评估若干基线,以说明挑战并且设置公开基准服务器。
主要贡献
本文的贡献总结如下:
1)本文提出了AmodalSynthDrive数据集,这是一种针对城市驾驶场景的全面合成非模态感知数据集,具有多种数据来源;
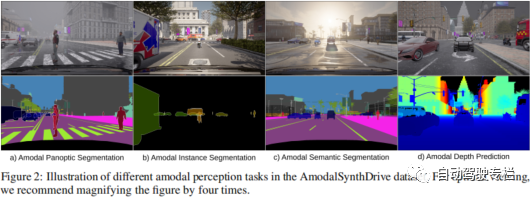
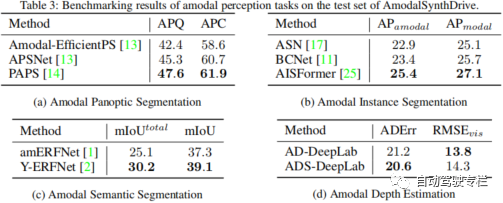
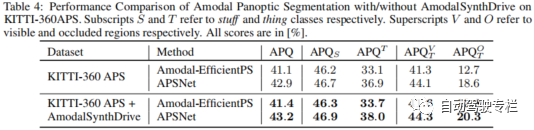
本文提出了针对非模态感知任务的基准,包括非模态语义分割、非模态实例分割和非模态全景分割
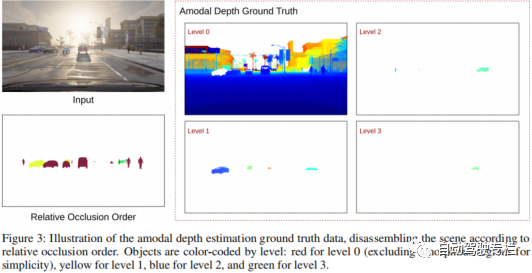
3)新型的非模态深度估计任务旨在促进增强空间理解。本文通过若干基线证明了这项新任务的可行性。
论文图片和表格
总结
感知是自动驾驶汽车的一项关键任务,但目前的方法仍然缺乏对复杂交通场景解释所需的非模态理解。因此,本文提出了AmodalSynthDrive,这是一个用于自动驾驶的多模态合成感知数据集。通过合成的图像和激光雷达点云,我们提供了一个全面的数据集,其中包括用于基本非模态感知任务的真值标注数据,并引入了一种新的任务来增强空间理解,称为非模态深度估计。本文提供了超过60000个单独的图像集,每个图像集都包含非模态实例分割、非模态语义分割、非模态全景分割、光流、2D和3D边界框、非模态深度以及鸟瞰图相关的数据。通过AmodalSynthDrive,本文提供了各种基线,并相信这项工作将为对动态城市环境中的非模态场景理解的新型研究铺平道路

原文链接:https://mp.weixin.qq.com/s/7cXqFbMoljcs6dQOLU3SAQ
以上是合成非模态感知数据集AmodalSynthDrive:用于自动驾驶的创新解决方案的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 2024 CSRankings全美计算机科学排名发布!CMU霸榜,MIT跌出前5
Mar 25, 2024 pm 06:01 PM
2024 CSRankings全美计算机科学排名发布!CMU霸榜,MIT跌出前5
Mar 25, 2024 pm 06:01 PM
2024CSRankings全美计算机科学专业排名,刚刚发布了!今年,全美全美CS最佳大学排名中,卡耐基梅隆大学(CMU)在全美和CS领域均名列前茅,而伊利诺伊大学香槟分校(UIUC)连续六年稳定地位于第二。佐治亚理工学院则排名第三。然后,斯坦福大学、圣迭戈加利福尼亚大学、密歇根大学、华盛顿大学并列世界第四。值得注意的是,MIT排名下跌,跌出前五。CSRankings是由麻省州立大学阿姆赫斯特分校计算机与信息科学学院教授EmeryBerger发起的全球院校计算机科学领域排名项目。该排名基于客观的
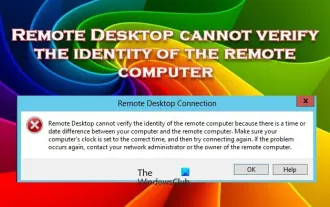 远程桌面无法验证远程计算机的身份
Feb 29, 2024 pm 12:30 PM
远程桌面无法验证远程计算机的身份
Feb 29, 2024 pm 12:30 PM
Windows远程桌面服务允许用户远程访问计算机,对于需要远程工作的人来说非常便利。然而,当用户无法连接到远程计算机或远程桌面无法验证计算机身份时,会遇到问题。这可能是由网络连接问题或证书验证失败引起的。在这种情况下,用户可能需要检查网络连接、确保远程计算机是在线的,并尝试重新连接。另外,确保远程计算机的身份验证选项已正确配置也是解决问题的关键。通过仔细检查和调整设置,通常可以解决Windows远程桌面服务中出现的这类问题。由于存在时间或日期差异,远程桌面无法验证远程计算机的身份。请确保您的计算
 修复:Microsoft Teams 错误代码 80090016 您的计算机的受信任平台模块出现故障
Apr 19, 2023 pm 09:28 PM
修复:Microsoft Teams 错误代码 80090016 您的计算机的受信任平台模块出现故障
Apr 19, 2023 pm 09:28 PM
MSTeams是与队友和同事交流、聊天或通话的值得信赖的平台。MSTeams上的错误代码为80090016以及您的计算机的受信任的平台模块出现故障的消息可能会导致登录困难。在错误代码得到解决之前,该应用将不允许您登录。如果您在打开MS团队或任何其他Microsoft应用程序时遇到此类消息,那么本文可以指导您解决问题。
 计算机的e是什么
Aug 31, 2023 am 09:36 AM
计算机的e是什么
Aug 31, 2023 am 09:36 AM
计算机的“e”是科学计数法符号,字母 "e" 在科学计数法中用作指数分隔符,表示 "乘以 10 的多少次方",在科学计数法中,一个数通常被写为M × 10^E的形式,其中 M 是一个介于1到10之间的数,而E表示指数。
 计算机cu是什么意思
Aug 15, 2023 am 09:58 AM
计算机cu是什么意思
Aug 15, 2023 am 09:58 AM
计算机中cu的意思取决于上下文:1、Control Unit,在计算机的中央处理器中,CU是负责协调和控制整个计算过程的组件;2、Compute Unit,在图形处理器或其他加速处理器中,CU是处理并行计算任务的基本单元。
 未能打开这台计算机上的组策略对象
Feb 07, 2024 pm 02:00 PM
未能打开这台计算机上的组策略对象
Feb 07, 2024 pm 02:00 PM
在使用电脑时,操作系统偶尔也会出现故障。今天遇到的问题是在访问gpedit.msc时,系统提示无法打开组策略对象,因为可能缺乏正确的权限。未能打开这台计算机上的组策略对象解决方法:1、访问gpedit.msc时,系统提示无法打开该计算机上的组策略对象,因为缺乏权限。详细信息:系统无法定位指定的路径。2、用户点击关闭按钮后,弹出如下错误窗口。3、立即查看日志记录,并结合记录信息,发现问题出在C:\Windows\System32\GroupPolicy\Machine\registry.pol文件
 为大模型提供全新科学复杂问答基准与测评体系,UNSW、阿贡、芝加哥大学等多家机构联合推出SciQAG框架
Jul 25, 2024 am 06:42 AM
为大模型提供全新科学复杂问答基准与测评体系,UNSW、阿贡、芝加哥大学等多家机构联合推出SciQAG框架
Jul 25, 2024 am 06:42 AM
编辑|ScienceAI问答(QA)数据集在推动自然语言处理(NLP)研究发挥着至关重要的作用。高质量QA数据集不仅可以用于微调模型,也可以有效评估大语言模型(LLM)的能力,尤其是针对科学知识的理解和推理能力。尽管当前已有许多科学QA数据集,涵盖了医学、化学、生物等领域,但这些数据集仍存在一些不足。其一,数据形式较为单一,大多数为多项选择题(multiple-choicequestions),它们易于进行评估,但限制了模型的答案选择范围,无法充分测试模型的科学问题解答能力。相比之下,开放式问答
 无法将数据从远程桌面复制到本地计算机
Feb 19, 2024 pm 04:12 PM
无法将数据从远程桌面复制到本地计算机
Feb 19, 2024 pm 04:12 PM
如果您在将数据从远程桌面复制到本地计算机时遇到问题,本文可以帮助您解决。远程桌面技术允许多用户访问中央服务器上的虚拟桌面,提供数据保护和应用程序管理。这有助于确保数据安全,并使公司能够更有效地管理其应用程序。用户在使用远程桌面时可能会遇到挑战,其中一个是无法将数据从远程桌面复制到本地计算机。这可能由不同因素引起阻止。因此,本文将提供解决此问题的指导。为什么无法从远程桌面复制到本地计算机?在计算机上复制文件时,文件会暂时存储在一个叫做剪贴板的位置。如果无法使用此方法将数据从远程桌面复制到本地计算机
